







一、系统环境
- ubuntu18.04
- cuda:11.4
- ROS:melodic
二、安装SDK
下载ZED SDK,官网下载速度太慢,使用别的途径下载,最后下载的文件名就是ubuntu18。
「ubuntu18」https://www.aliyundrive.com/s/AUX7uSAmBhz 提取码: d67o
点击链接保存,或者复制本段内容,打开「阿里云盘」APP ,无需下载极速在线查看,视频原画倍速播放。
./ubuntu18
安装完成后测试是否安装成功
cd /usr/local/zed/tools
./ZED_Explorer
若出现双目相机的图像则安装成功。。。
三、安装ZED2 ROS工具
cd ~/zed_ws/src
git clone https://github.com/stereolabs/zed-ros-wrapper.git
cd ../
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
source ./devel/setup.bash
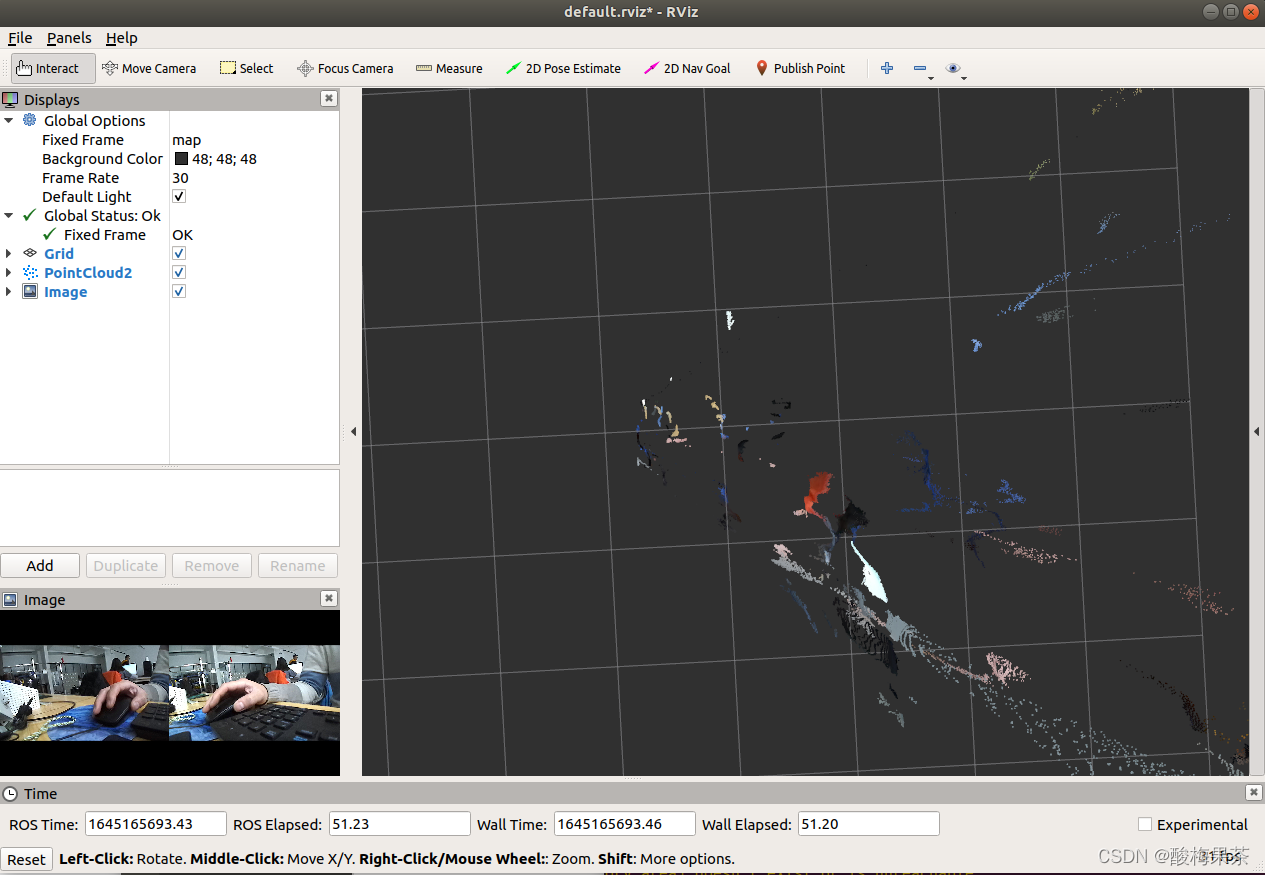
roslaunch zed_wrapper zed2.launch
打开rviz,可以显示点云、深度图和RGB图像。
四、编译可能遇到的问题
1、编译错误
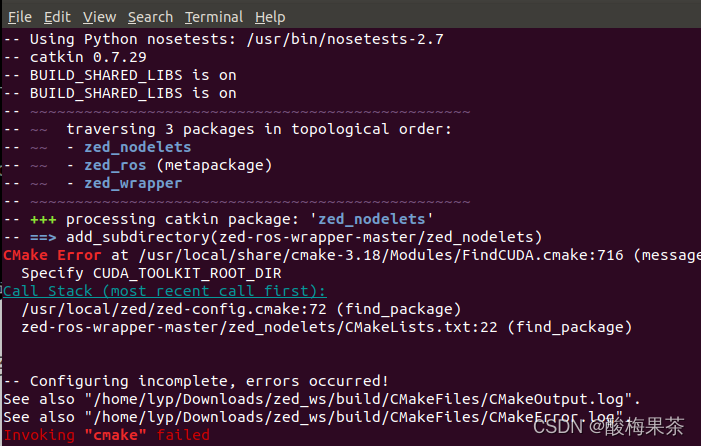
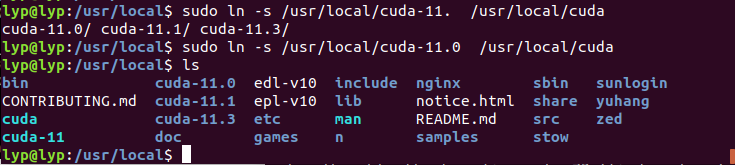
解决方案:因为找不到cuda,所以链接cuda。根据自己的版本修改。
sudo ln -s /usr/local/cuda-11.0 /usr/local/cuda
2、编译出现错误
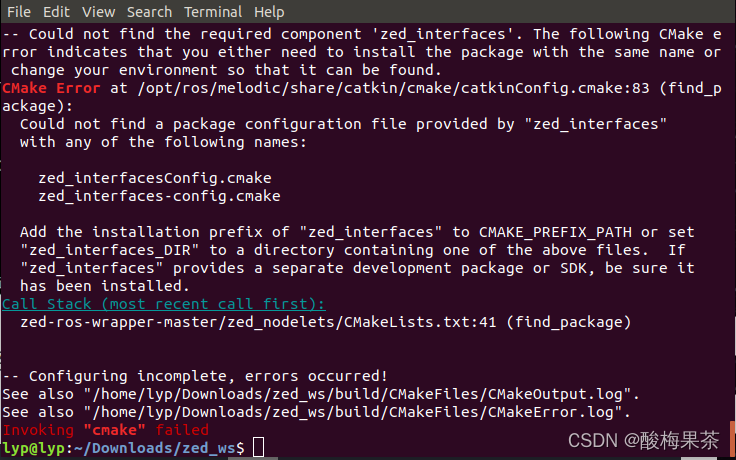
解决方案:
只需要安装一个zed_interfaces再重新编译一下就可以了,注意安装路径/zed_ws/src
git clone https://github.com/stereolabs/zed-ros-interfaces















 5579
5579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









