







 本文详细介绍了如何利用牛顿方程对车辆进行二自由度建模,通过忽略转向系统和悬架影响,构建简化模型,并用状态空间形式表示。接着,通过Simulink进行了方向盘转角阶跃响应的仿真,展示了轮胎受力分析和模型简化的过程。
本文详细介绍了如何利用牛顿方程对车辆进行二自由度建模,通过忽略转向系统和悬架影响,构建简化模型,并用状态空间形式表示。接着,通过Simulink进行了方向盘转角阶跃响应的仿真,展示了轮胎受力分析和模型简化的过程。
引言
本文将利用牛顿方程对车辆二自由度模型建模,建立其二自由度微分方程并改写为状态空间方程,最后使用simulink建模仿真了车辆二自由度模型的方向盘转角阶跃响应。
一 二自由度汽车模型简化过程
(1)忽略转向系统的影响,直接以前轮转角作为输入;
(2)忽略悬架的作用,车身只做平行于地面的平面运动,没有沿z轴的垂向运动、绕y轴的俯仰运动以及绕x轴的侧倾运动,且左侧车轮的垂向载荷等于右侧车轮的垂向载荷即 ;
(3)汽车沿x轴的前进速度 视为不变;
(4)侧向加速度不超过0.4g,确保轮胎的侧偏特性处于线性范围;
(5)驱动力不大(受力分析不考虑驱动力),不考虑地面切向力对轮胎侧偏特性的影响,不考虑空气阻力;
(6)忽略左右轮胎由于载荷变化而引起轮胎特性的变化以及轮胎回正力矩的作用。
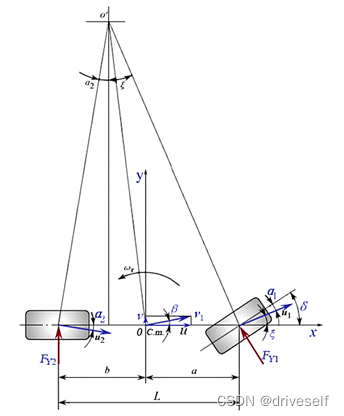
这样实际的汽车简化成一个两轮摩托车模型,如图所示。它是由前后两个有侧向弹性的轮胎支撑与地面,具有侧向运动(侧偏角 )及横摆运动(横摆角速度 )的二自由度汽车模型。
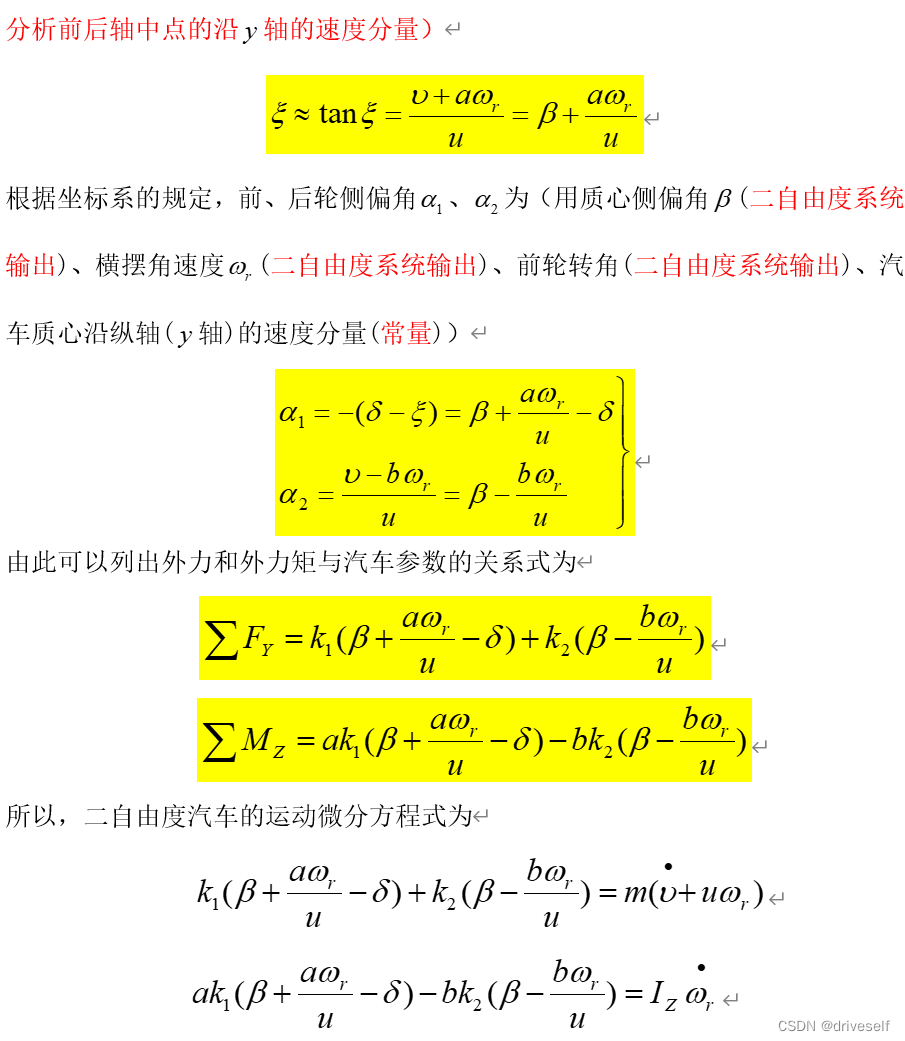
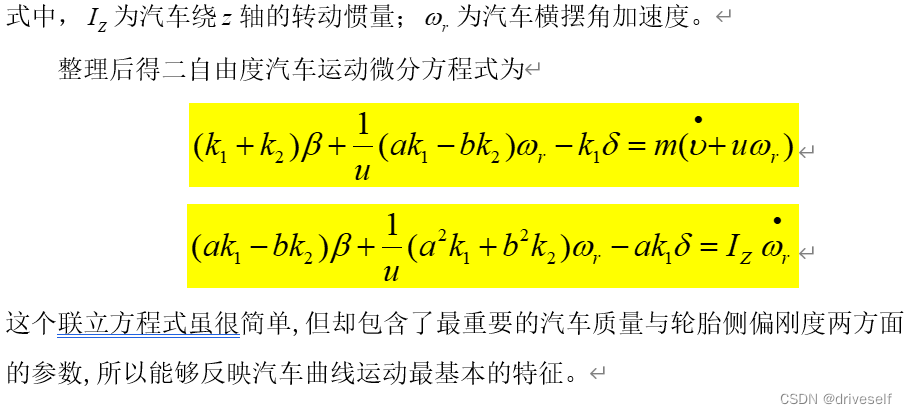
二 二自由度汽车模型的运动微分方程建立过程
分析时,令车辆坐标系的原点与汽车的质心重合。显然汽车的质量参数,如转动惯量等。对于固结与汽车的这一动坐标系而言为常数。这正是采用车辆坐标系的方便之处。因此,只要将汽车的(绝对)加速度与(绝对)角加速度及外力与外力矩沿车辆坐标系的轴线分解,就可以列出沿这些坐标轴的运动微分方程。
下面依次确定:汽车质心的(绝对)加速度在车辆坐标系上的分量,二自由度汽车受到的外力与绕质心的外力矩,外力、外力矩与汽车运动参数的关系。最后,列出二自由度汽车的运动微分方程式。
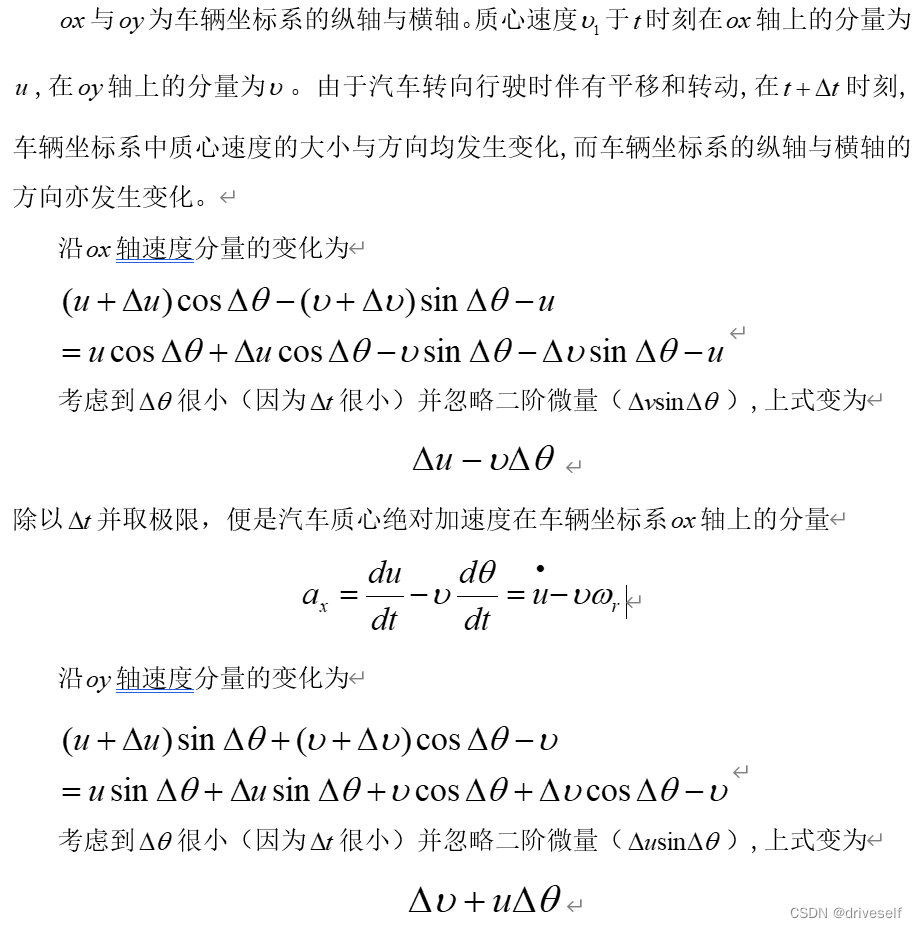
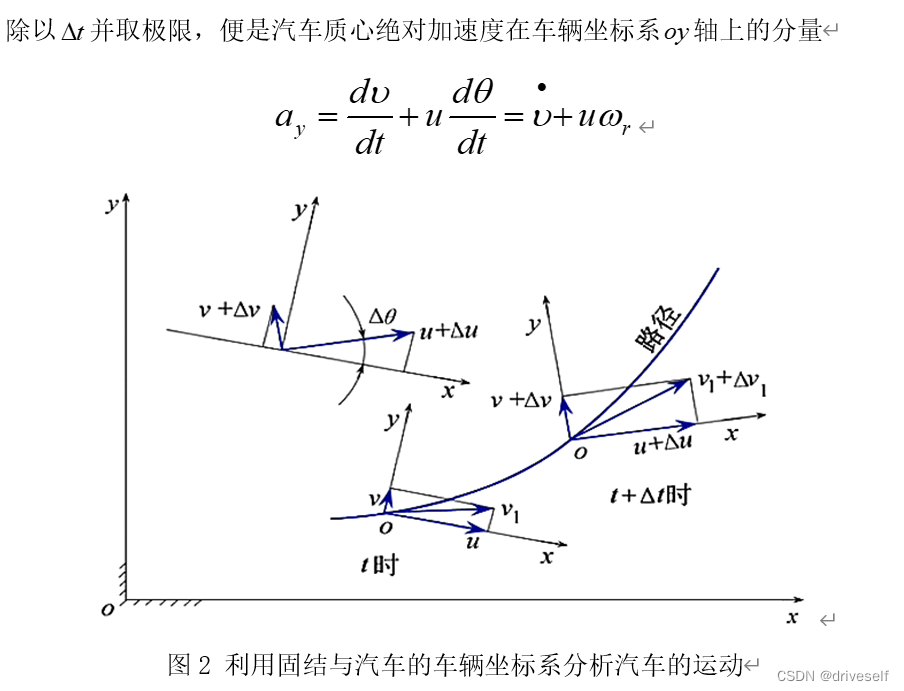
2.1首先确定汽车质心的(绝对)加速度在车辆坐标系上的分量
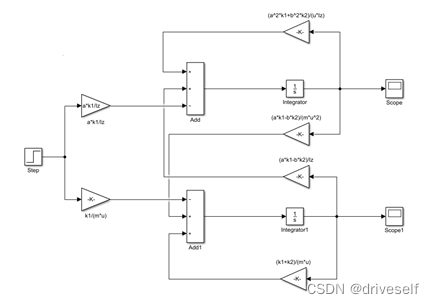
四 Simulink建模仿真
输入:前轮转角为阶跃信号
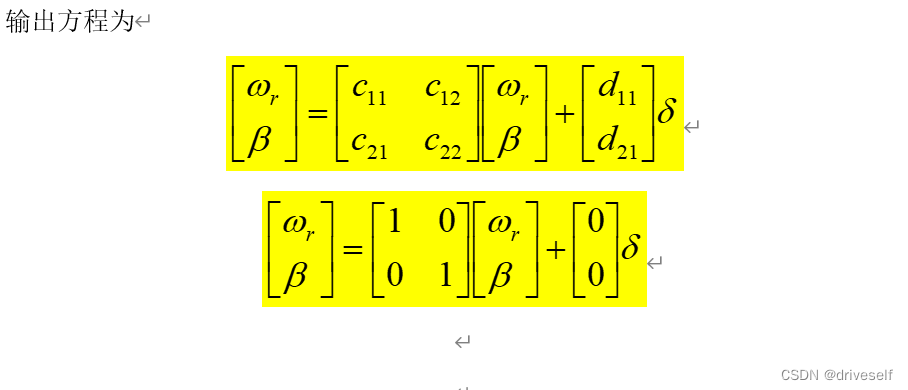
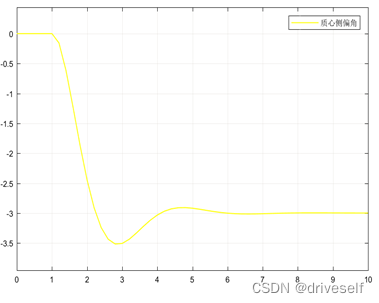
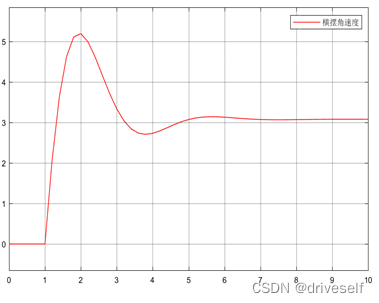
输出:汽车的横摆角速度和质心侧偏角
总结
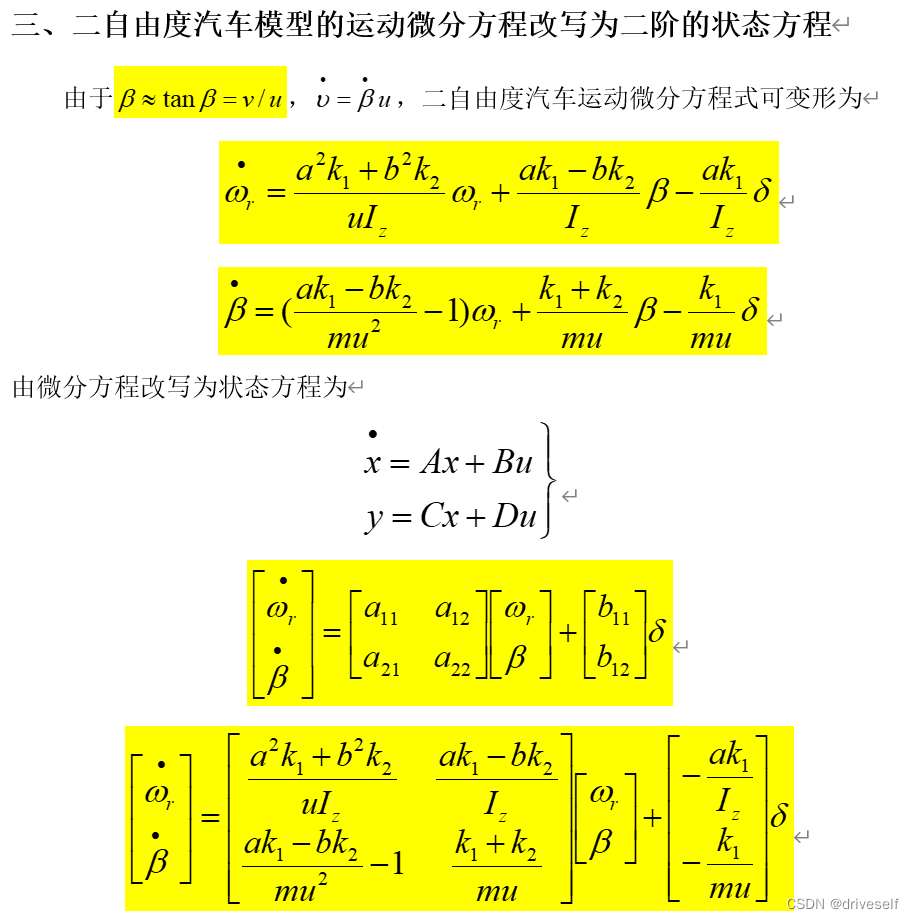
本文深入分析了车辆轮胎受力和简化建模过程,详细推导了车辆二自由度模型运动微分方程并改写为状态空间方程,最后使用simulink建模仿真了车辆二自由度模型的方向盘转角阶跃响应。

















 946
946

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









