







 本文详细介绍了如何在Carsim中设置车辆的初始位置,包括使用OPT_INIT_PATH关键字控制是否根据参考路径或自定义坐标(X,Y,Yaw),以及如何在两种模式下操作车辆的初始位姿。
本文详细介绍了如何在Carsim中设置车辆的初始位置,包括使用OPT_INIT_PATH关键字控制是否根据参考路径或自定义坐标(X,Y,Yaw),以及如何在两种模式下操作车辆的初始位姿。
引言
Carsim进行路径跟踪仿真时需要自定义设置车辆的初始位置,carsim有设置车辆初始位置的关键字但是大部分人不清楚设置的是车辆具体哪个点的坐标,对此本文会进行实操演示。
操作步骤演示
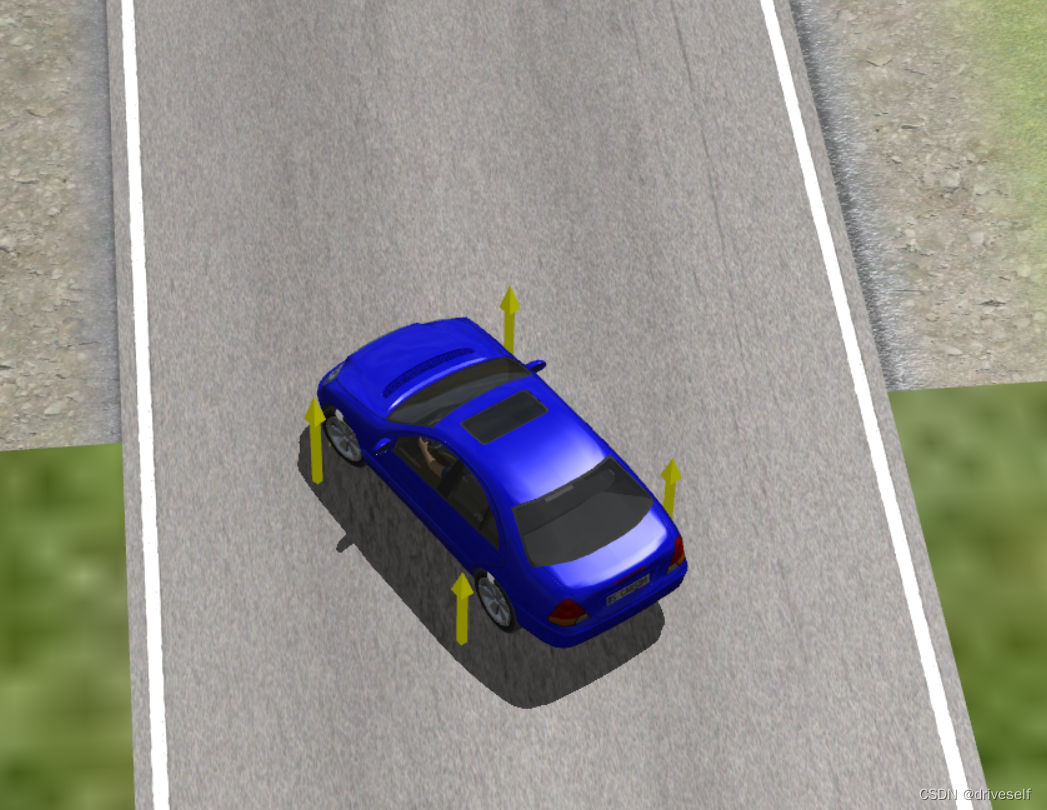
车辆的初始位姿设置方法如下(注意设置的是车辆前轴中心的位姿):
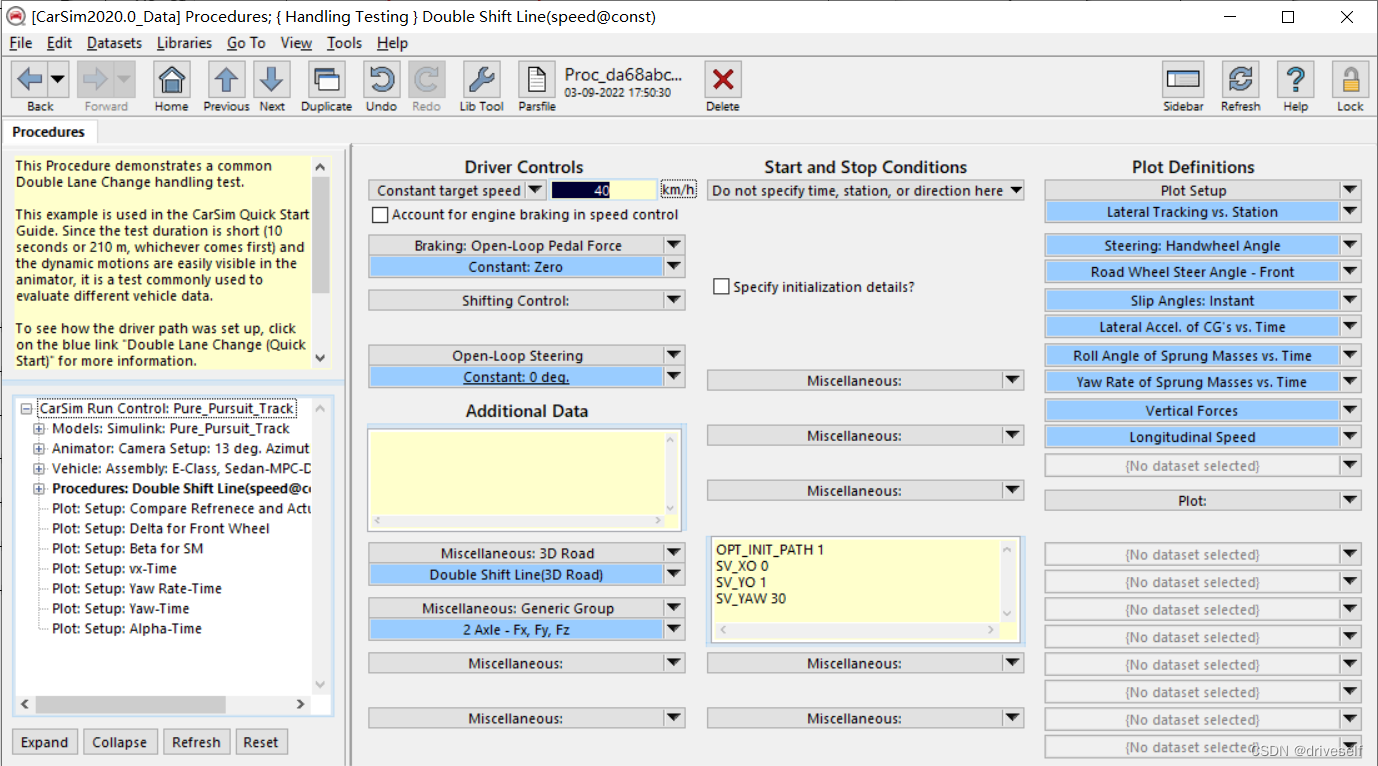
Carsim关键字:OPT_INIT_PATH(是否根据参考路径初始化车辆的初始位姿),当 OPT_INIT_PATH = 0时不根据参考路径设置车辆的初始位姿,当OPT_INIT_PATH = 1时根据参考路径设置车辆的初始位姿,以参考路径中第一个点的位姿初始化车辆的初始位姿。
故当OPT_INIT_PATH = 0可以自行设置车辆的初始位姿,设置方法如下:
| OPT_INIT_PATH 0 | 自定义初始位姿模式 |
|---|---|
| SV_XO = -2.7 | 车辆前轴中心的X坐标为-2.7m |
| SV_YO = 1 | 车辆前轴中心的Y坐标为1m |
| SV_YAW = 30 | 车辆的航向角为30度 |
当OPT_INIT_PATH = 0,设置车辆的初始位姿(X, Y, Yaw) = [0m, 1m, 30°],自定义车辆的初始位姿效果如下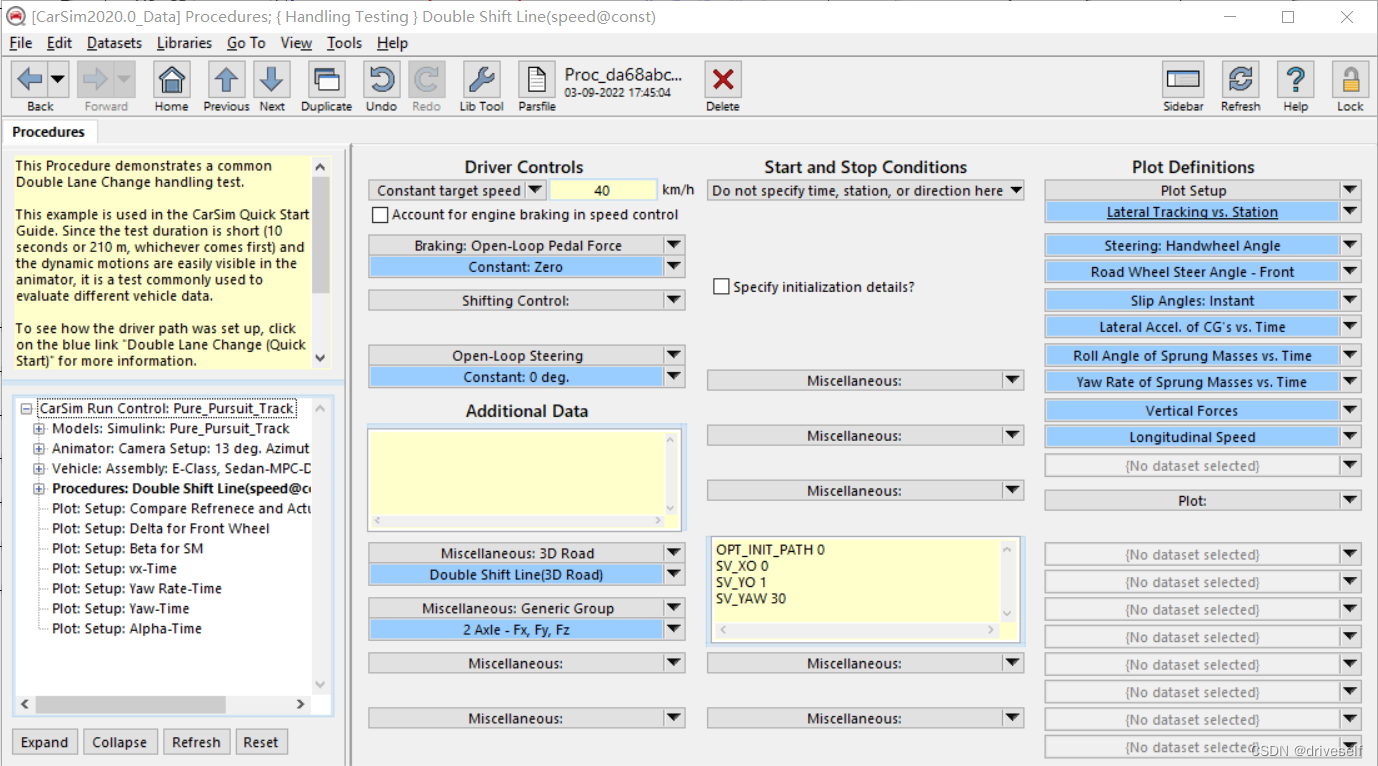
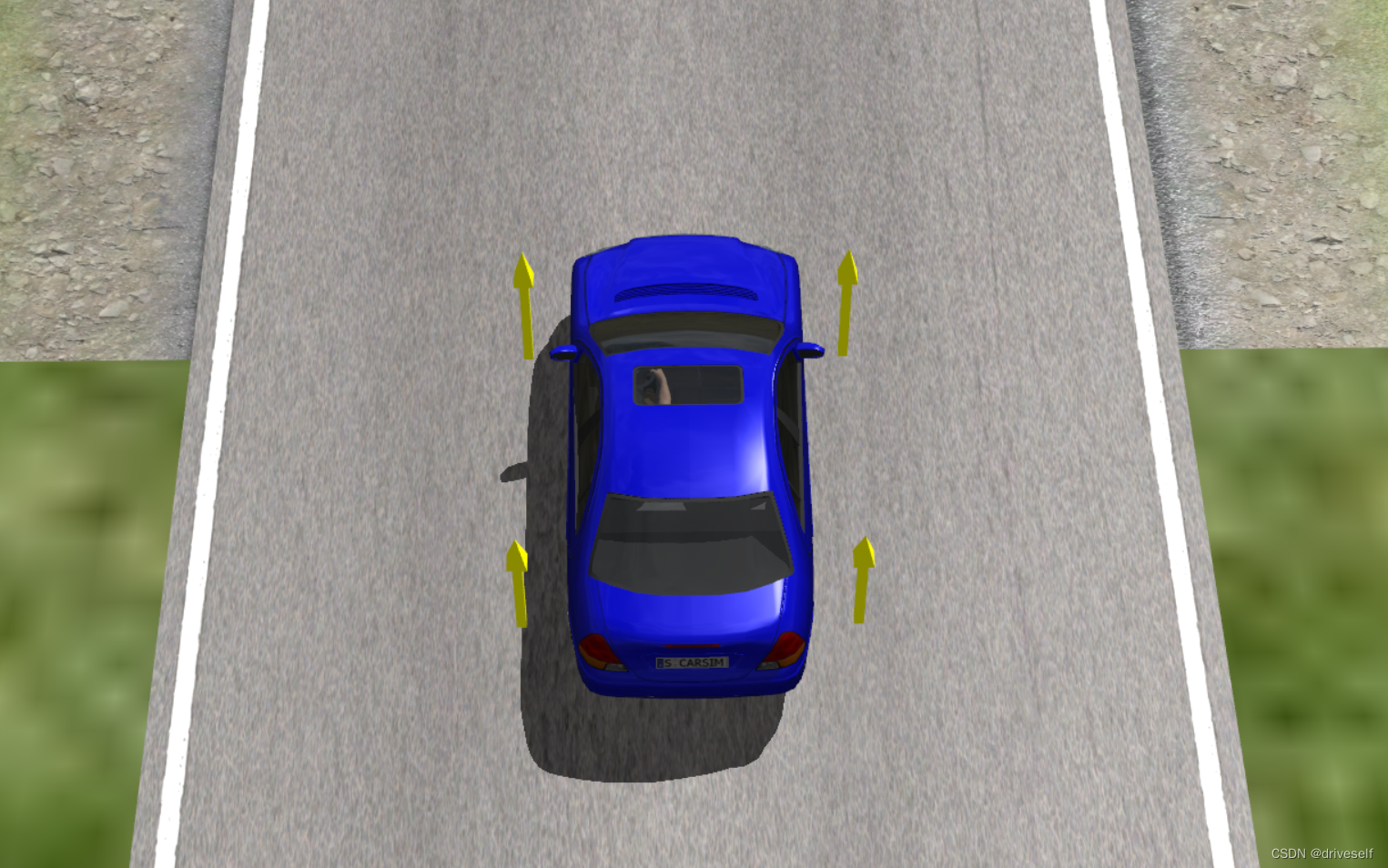
当OPT_INIT_PATH = 1,由参考道路的第一个点(X, Y, Yaw) = [0m, 0m, 0°]设置车辆的初始位姿

















 336
336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









