






【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数
文章目录
前言
【电机控制】直流有刷电机、无刷电机汇总——持续更新
使用工具:
1.示波器:PICO2205A
2.电桥LCR:VICIOR4090A
3.电流钳:汉泰CC65
4.直流稳压电源:GPS305D(30V/5A)
5.上位机:VOFA+
提示:以下是本篇文章正文内容,下面案例可供参考
一、机械转速
概念:
机械转速与电转速和电周期之间存在密切的关系。首先,我们需要明确这几个概念。
机械转速是指机械设备旋转一周所需的时间,它描述了机械转动部分在单位时间内转动的次数或圈数。电转速,特别是在电机中,指的是电机工作时旋转的速度,通常用每分钟转数(RPM)或每秒转数(RPS)来表示。
而电周期,在电力系统中,特指电压的周期。电压的周期是指电压一个正弦周期所需要的时间,也就是电压一次完整的变化过程。电机运转时,其叶片或转子在磁场中不断旋转,从而产生一定频率的电磁波,使电机绕组上产生交变电压。因此,电机的电周期与电压的周期是相同的。
接下来,我们探讨它们之间的关系。对于电机而言,其电转速(即旋转速度)与电周期是密切相关的。电机的电周期决定了其旋转的频率,而旋转频率与转速是直接相关的。简单来说,电周期越短,电机的旋转频率越高,从而转速也越高;反之,电周期越长,电机的旋转频率越低,转速也相应降低。
此外,电机的转速还受到电源频率、电机绕组数、电机类型和负载等多种因素的影响。在电机控制中,常使用变频器来控制电机转速,通过改变电源频率来调节电机的电周期,从而实现对转速的精确控制。
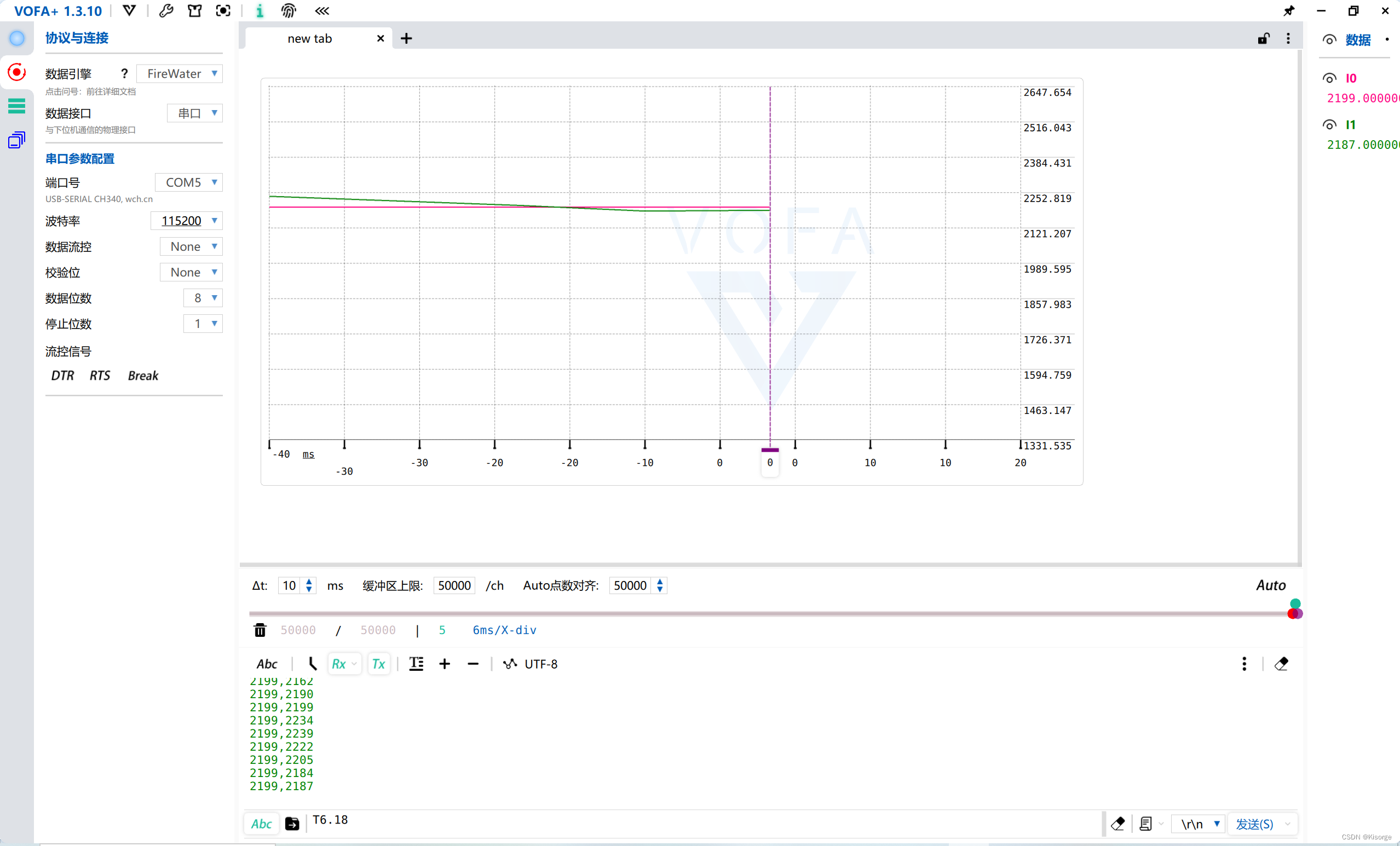
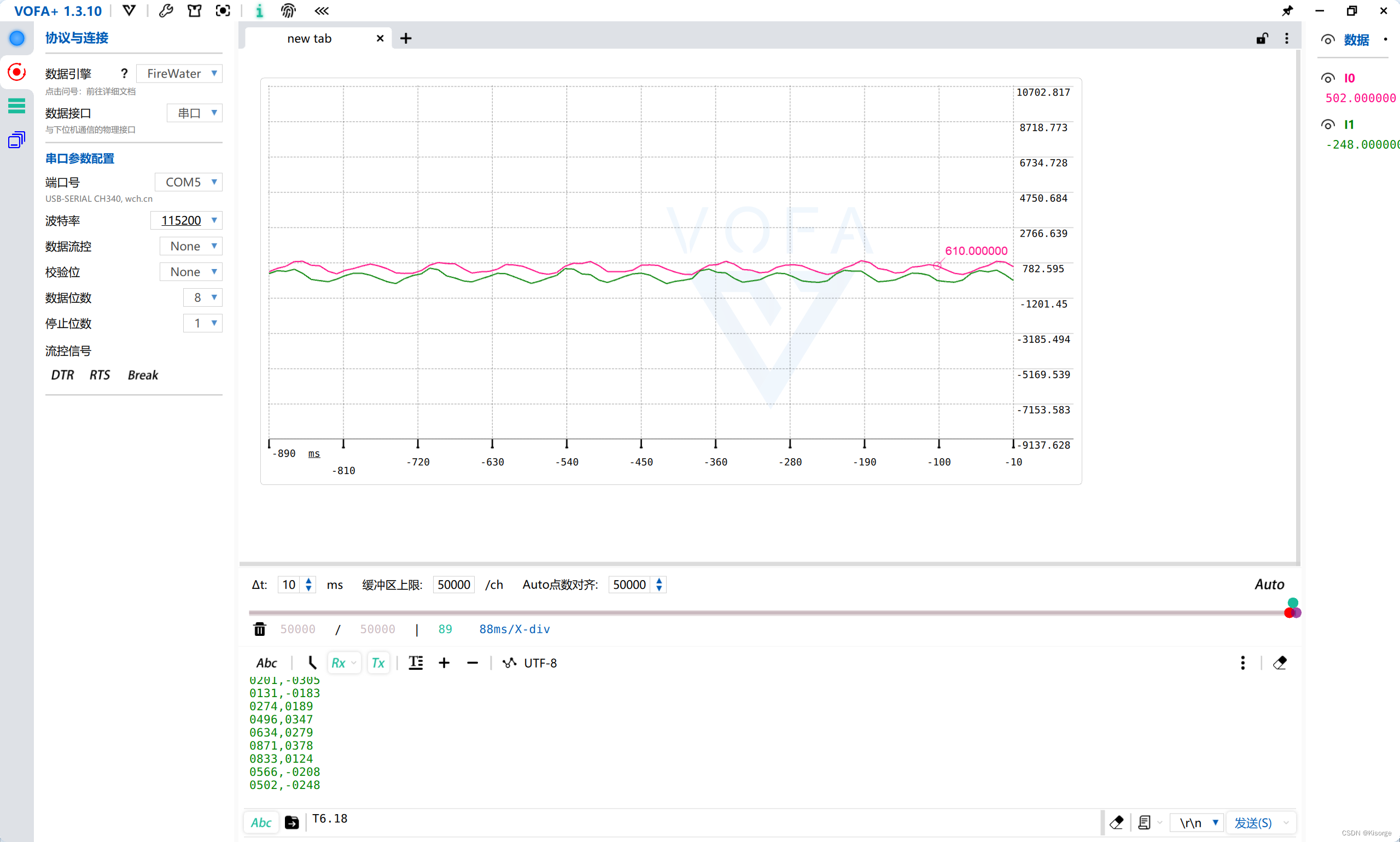
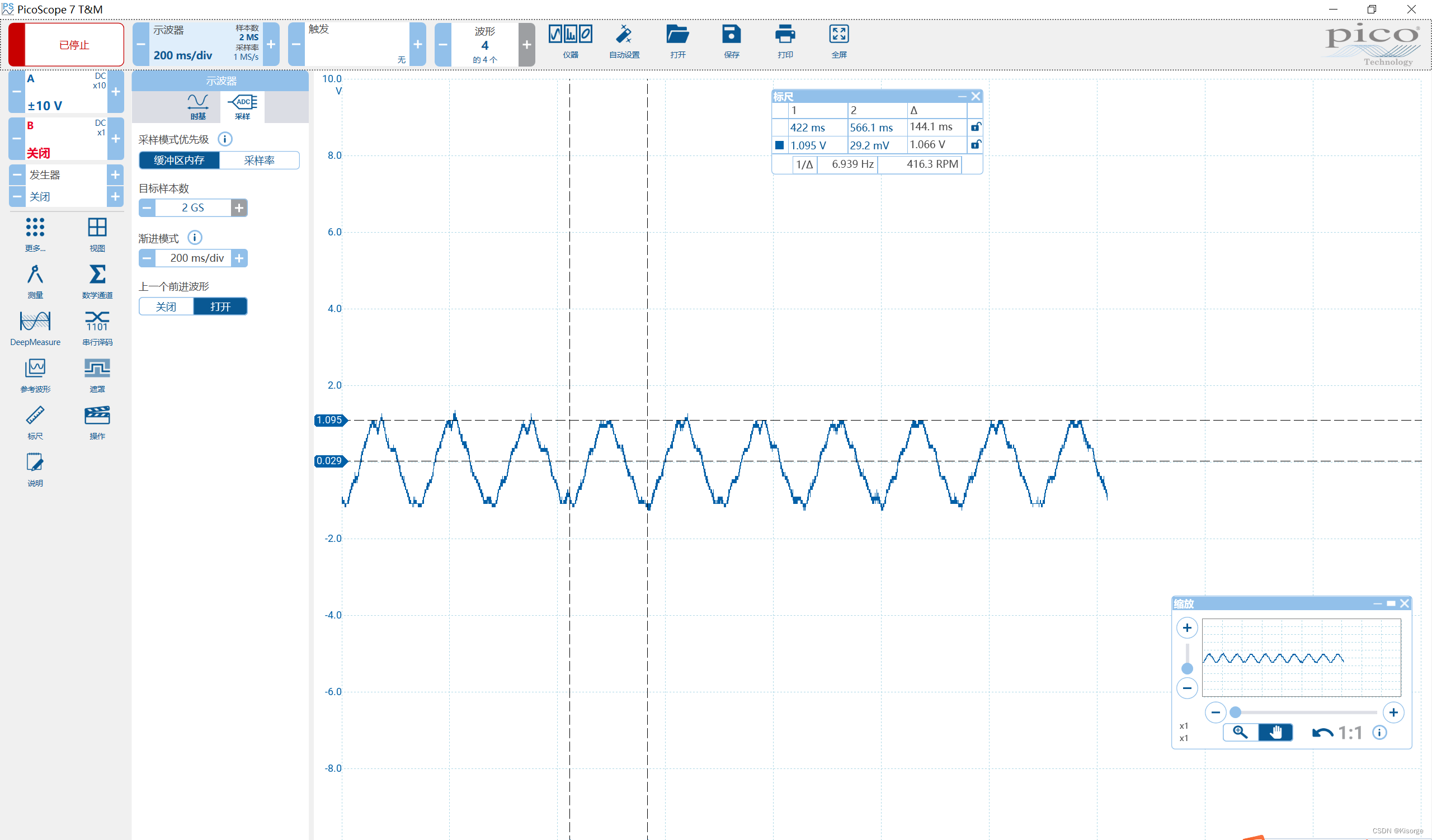
通过串口打印,设置目标转速2200RPM,观测器实际反馈目标转速2187RPM左右。
实验过程:
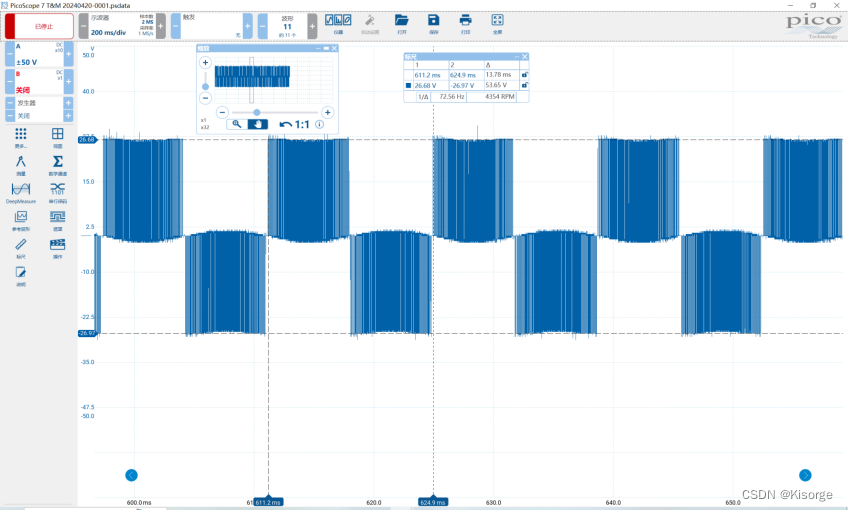
示波器PICO,表笔接两相,看一个电周期的频率,可以直接看出来4354RPM,由于我用的电机是2极对数,所以除以2就得到了计算的机械转速2177RPM。
计算公式如下:
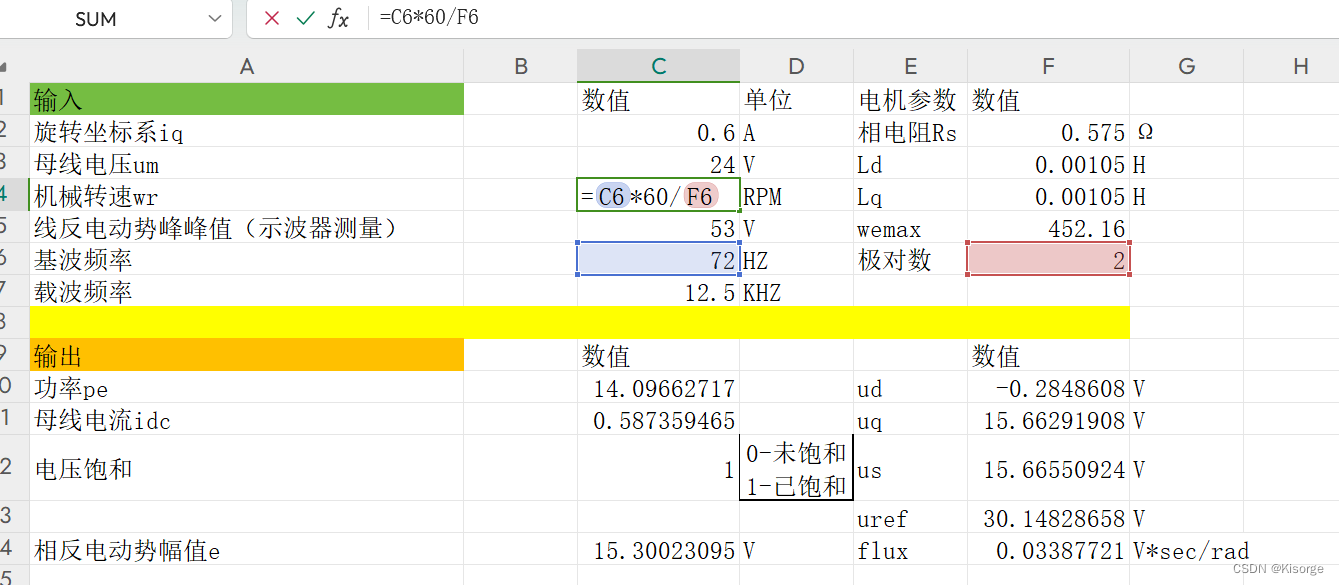
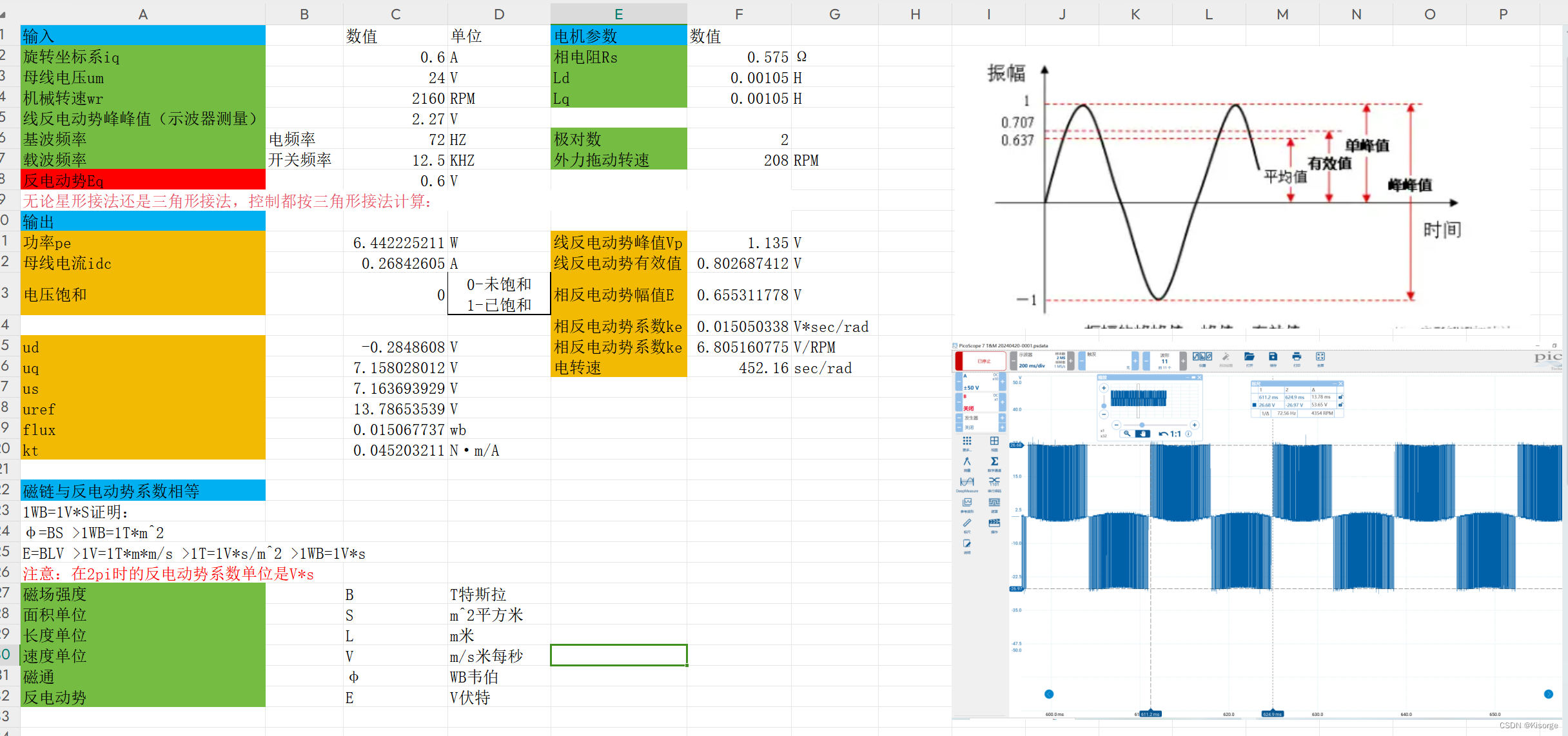
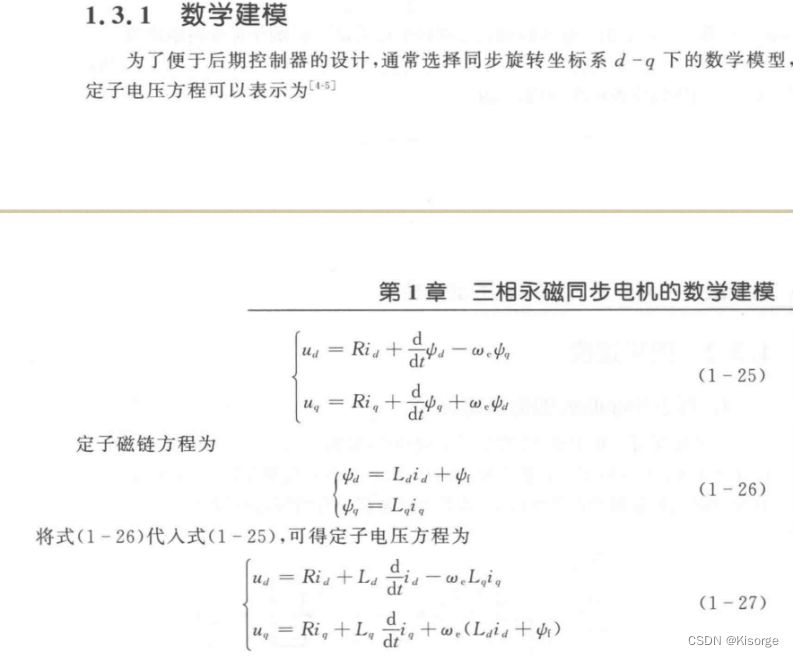
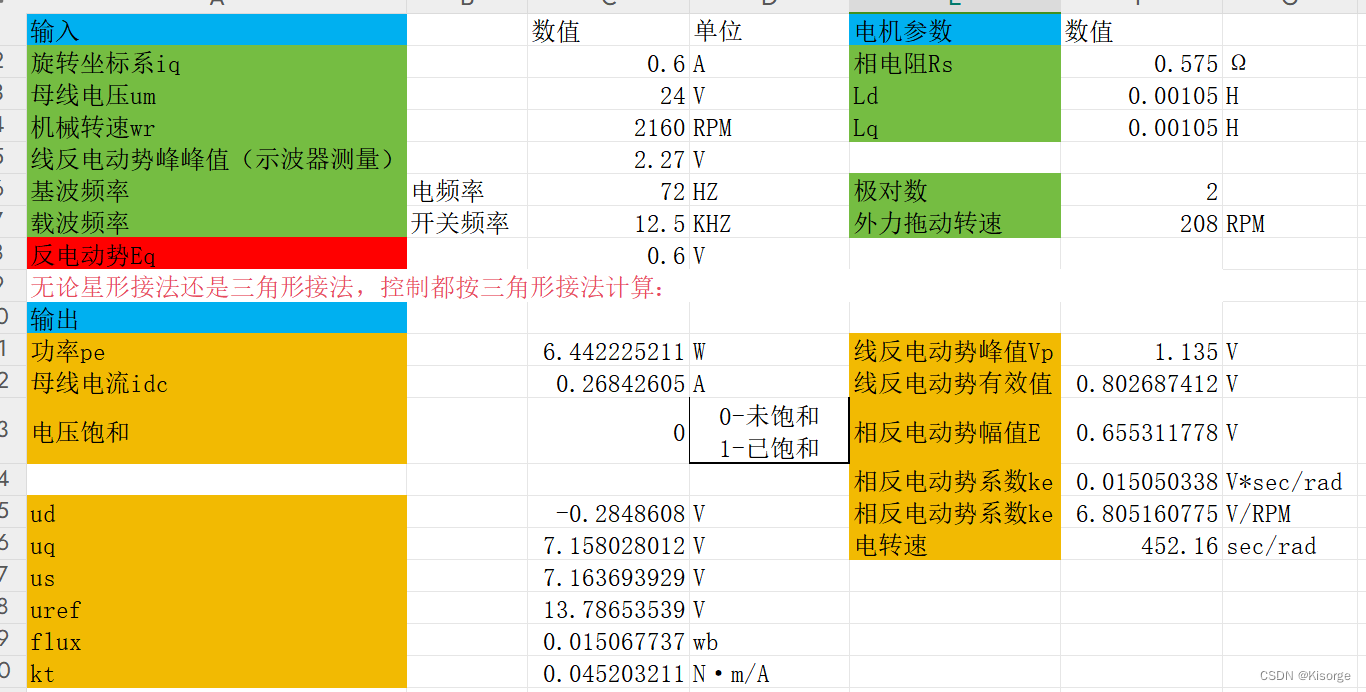
二、ud、uq、us
在上一节,我们已经把电机参数求出来了,例如反电动势系数,在求旋转坐标系下的uduq时,需要用到磁链,磁链与反电动势系数其实是一样的,代入公式即可
再通过dq电压平方和开根号求出us
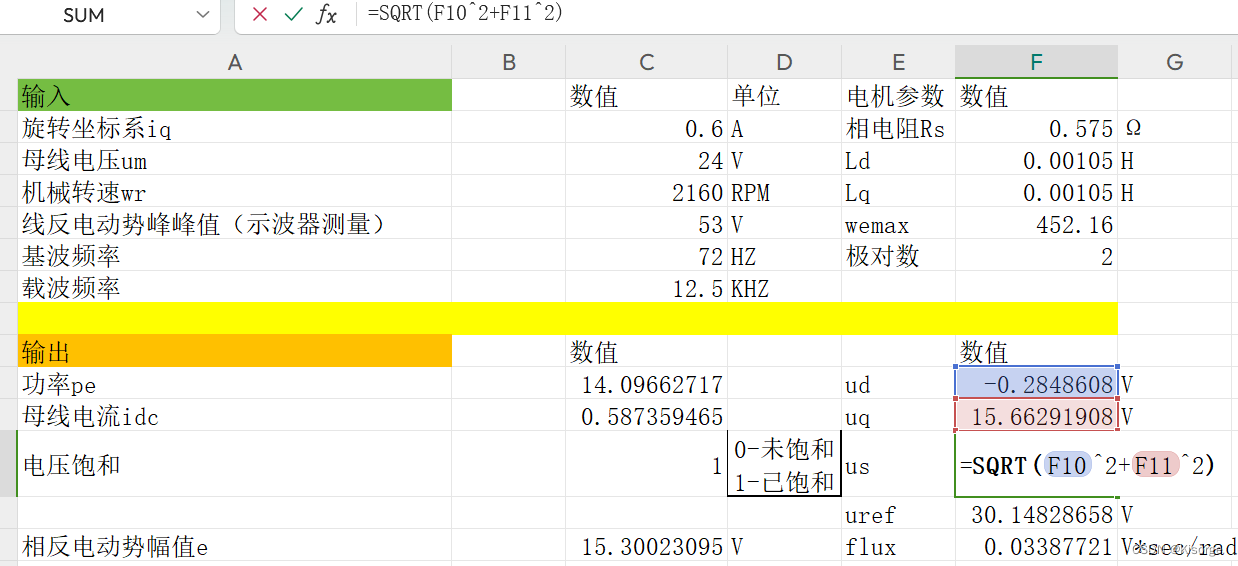
三、输出功率
输出功率与iq有关,因此需要把iq打印出来,要注意,此时的iq没有经过pi控制器,是反馈的iq,而不是输出的iq
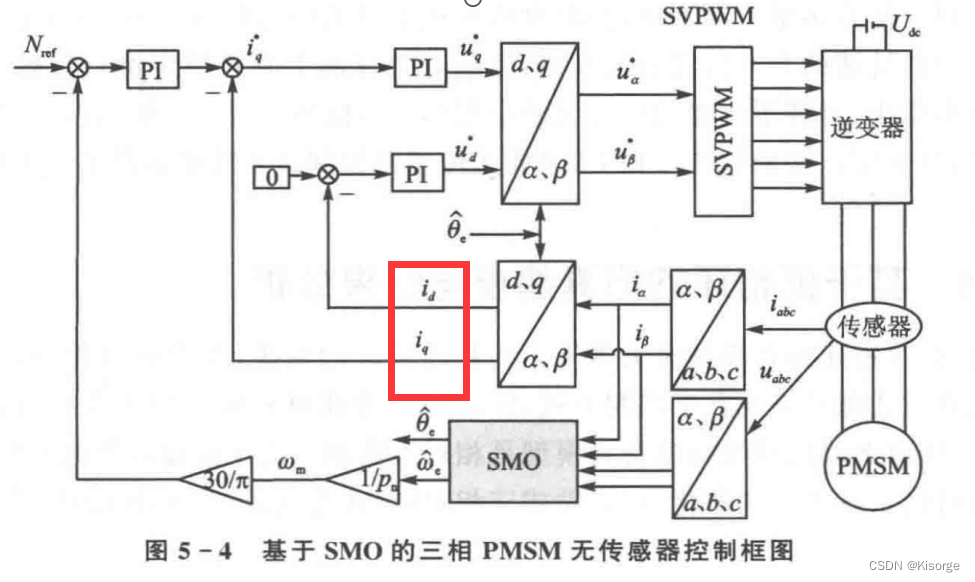
这个是反馈的iq
代入输出功率公式
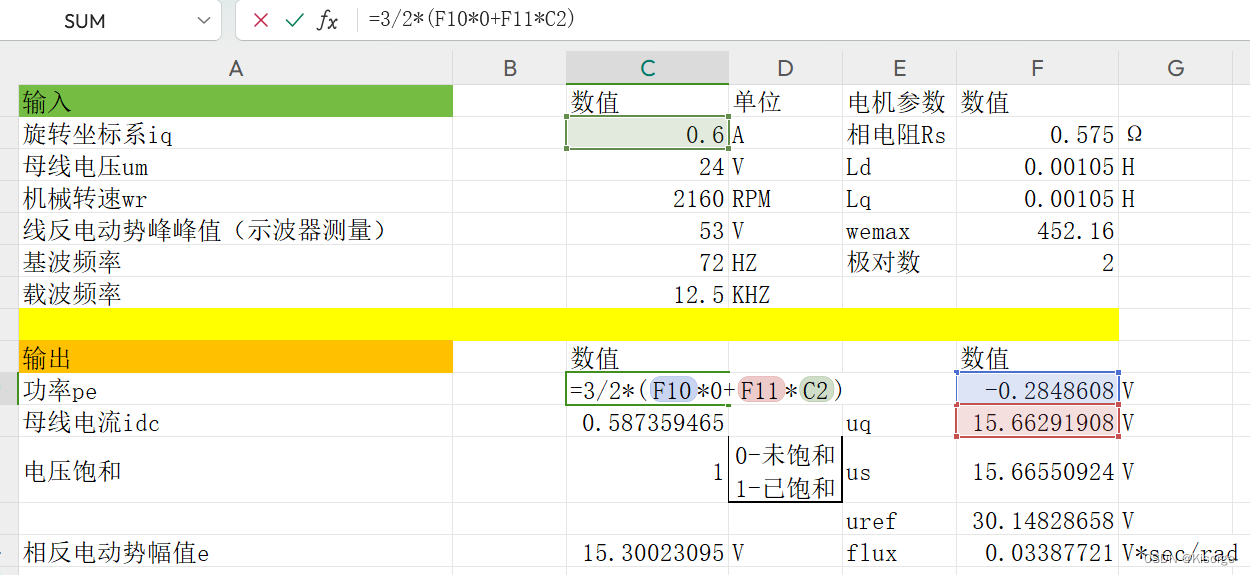
四、相反电动势幅值
a.电机通过控制器转动时——两相之间,线电压:
概念:在电机通过控制器驱动的过程中,我们首先需要理解电机运行时的基本原理。电机在运转时,由于电流通过其绕组,会在绕组中产生磁场,这个磁场与电机的旋转磁场相互作用,从而产生转矩,使电机得以旋转。
当我们谈到线电压时,它通常指的是电机绕组两端之间的电压,即电源提供的电压。这个电压用于驱动电机中的电流,进而产生所需的磁场和转矩。
而线反电动势,则是电机在旋转过程中,由于其内部的磁场变化而在绕组中产生的电动势。这个反电动势的方向与电源提供的电压方向相反,它的大小与电机的转速和磁场强度有关。反电动势是电机在运行时的一个自然特性,它会对电机的电流和性能产生影响。
因此,在电机通过控制器驱动时,相对相之间产生的主要是线电压,用于驱动电机旋转。同时,由于电机的旋转,也会产生线反电动势,这是电机运行时的一个固有特性。控制器在驱动电机时,需要考虑到这个反电动势的影响,以确保电机的稳定运行和性能优化。
在计算机械转速时,我们用到了这个此波形,通过上面的描述,我们要知道,此波形为线电压波形,而不是线反电动势波形,因此无法计算反电动势
b. 电机通过外力转动时——两相之间,线反电动势:
这是我电机参数测量时,所用到的实验波形,此波形为线反电动势波形,实验过程参考此链接
【电机参数】直流无刷电机2804电机参数测量——电感、电阻、极对数、磁链常数
使用博世电动螺丝刀,通过均匀转动,带动电机转子,产生线反电动势,且为动生电动势。
概念:
当电机通过外力转动时,相对相之间主要产生的是线反电动势,而不是线电压。
线反电动势是由于电机转子在磁场中旋转时,磁通量发生变化而在电机绕组中产生的电动势。根据法拉第电磁感应定律,当导体在磁场中运动时,会在导体中产生感应电动势。在电机中,转子的旋转导致绕组中的导体相对于磁场运动,从而产生线反电动势。
这个线反电动势的方向与电机正常运转时电源提供的电压方向相反。因此,当电机通过外力转动时,如果外力方向与电机正常运转时的旋转方向相同,那么产生的线反电动势会尝试抵消外力的作用,使得电机难以继续转动。这也是为什么有些电机在外力作用下会产生阻力或制动力矩的原因。
需要注意的是,虽然外力转动电机时主要产生的是线反电动势,但在某些情况下,电机绕组中可能仍然存在微弱的线电压。这可能是由于电机内部电阻、电感等因素导致的微弱电流产生的电压。然而,在大多数情况下,这个线电压相比于线反电动势来说可以忽略不计。
当外部拖动无刷电机的转子转动时,产生的电动势主要是动生电动势。这是因为动生电动势是由于导体在磁场中运动而产生的电动势,与导体的运动方向和磁场方向有关。在无刷电机中,当转子被外部力量拖动旋转时,转子中的导体在磁场中运动,从而产生动生电动势。
感生电动势则是由磁场变化引起的电动势,与磁场的变化率有关。在无刷电机正常运行时,由于电流的变化,磁场也会发生变化,从而产生感生电动势。但在外部拖动转子转动的情况下,主要产生的是动生电动势。
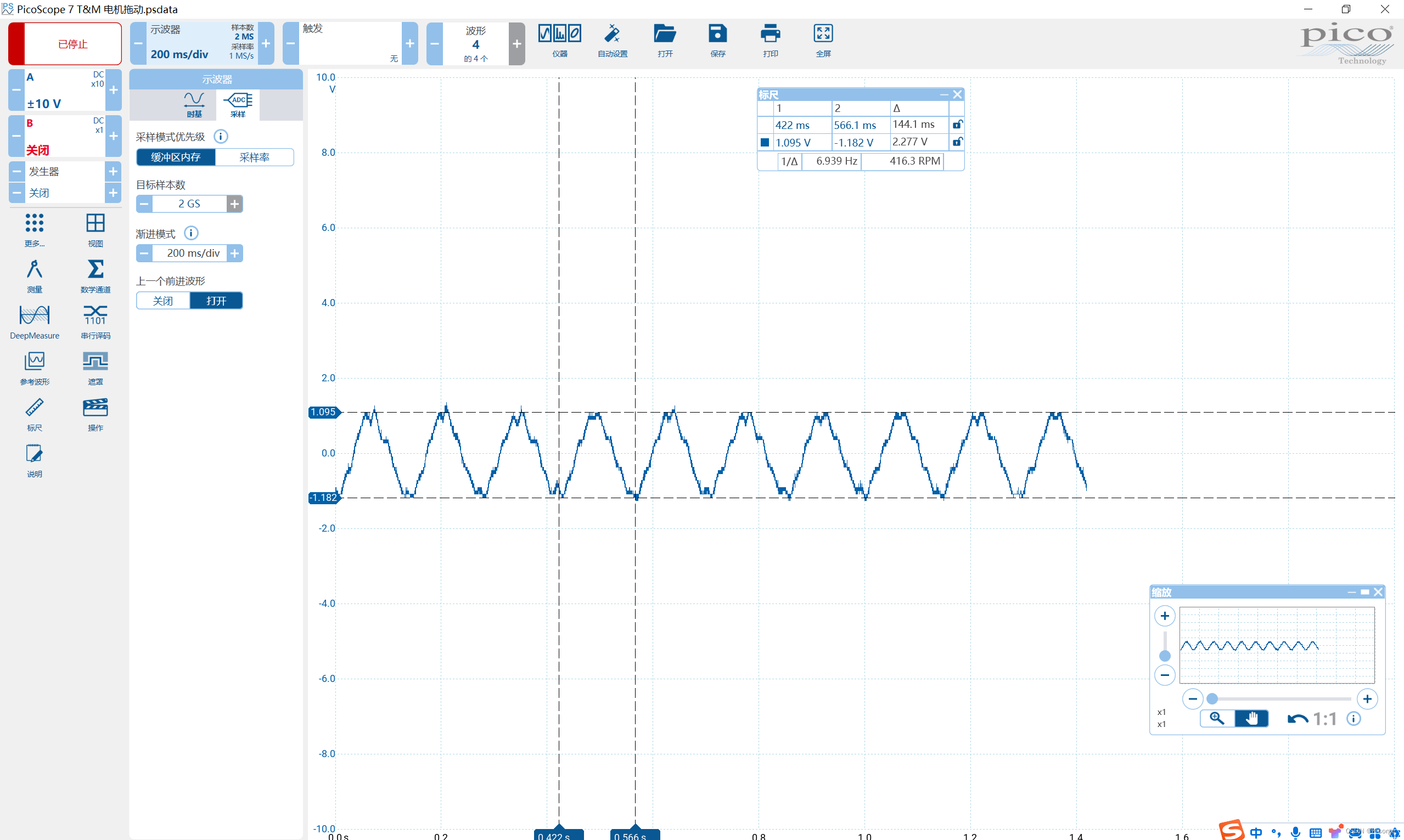
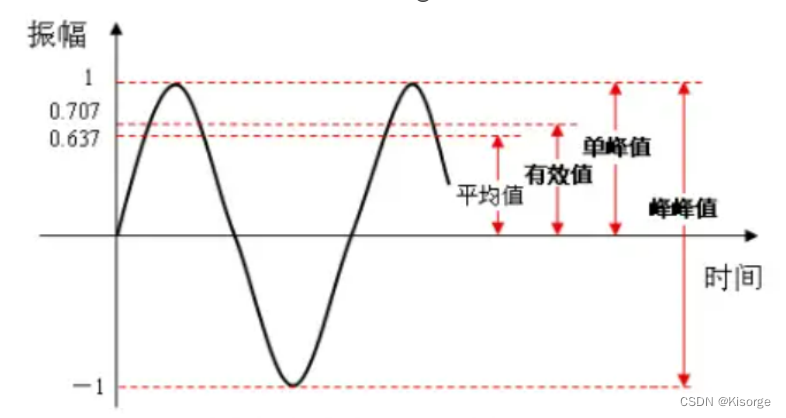
线反电动势峰峰值可以通过之前推算机械速度的波形看出,2.27V左右
再计算相反电动势幅值e=0.65V
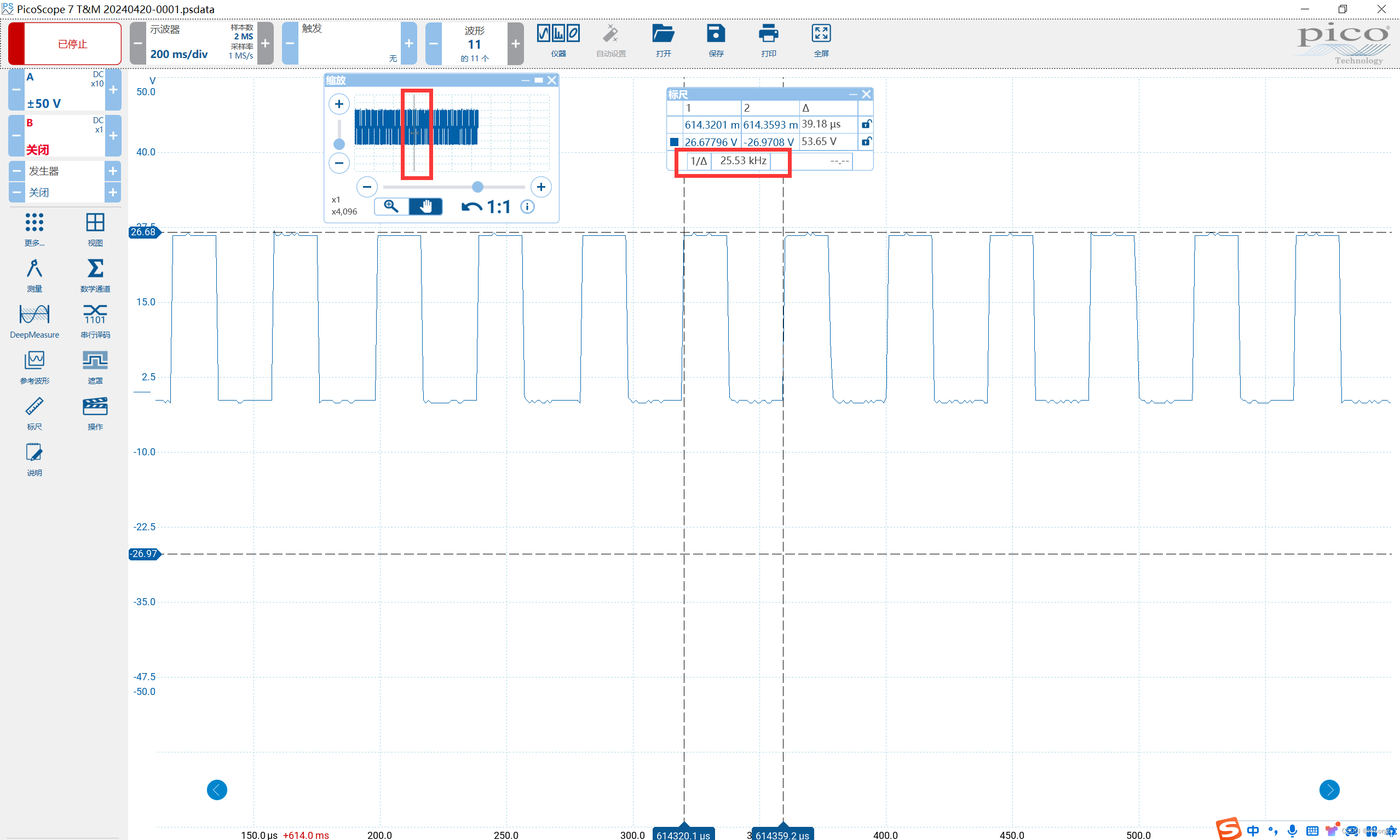
五、载波周期
a.电机通过控制器转动时——两相之间,线电压:
通过两相之间测量的线电压需要除2即为PWM输出的载波周期,25/2=12.5Khz
b.电机通过控制器转动时——相对地之间,端电压:
通过相对地之间测量的端电压,载波周期即波形到下一个波形,无需除2,
六、转矩常数
a.FOC控制,反电动势正弦波(PMSM)
之前所用到的反电动势系数,是用相电动势计算得到的,
如果反电动势常数不用线电压表示,
1.而用相电压峰值表示
Kt =3/2·p·Ke
中国的GB/T 30549-2014明确规定正弦波电机反电动势常数用线电压的有效值计算,而非相电压也非峰值电压;国外用的是相反电动势有效值;
2.若用线电压峰值表示
Kt =根号3Ke
3.三角形绕线
电机定子绕组在三角形接法中,相电压等于线电压,但相电流不等于线电流
4.星形绕线
星形接法,电压是相电压的根号3倍
其中kt单位为N·m/A,ke单位为V*s/rad
b.六部方波控制,反电动势梯形波(BLDC)
1.Kt单位N.m/A Ke单位V.s/rad条件:
Kt=Ke
2.Ke单位V/rpm时:
因为1rad/s=30/pi rpm所以Kt=30/pi
Kt=9.55 Ke
七、参考资料
关于电机的标幺值
永磁同步电机的反电动势常数怎么算?
永磁同步电机反电动势常数,磁链怎么计算?
转矩系数与反电势系数
PMSM与BLDC的分割线
总结
本文仅仅简单介绍了【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数方面,评论区欢迎讨论。



















 1330
1330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











