









文章目录
- VINS_Fusion部分代码讲解
- estimator.cpp
- Estimator::getIMUInterval
- Estimator::processIMU
- Estimator::processImage
- 流程和功能总结
- Estimator::processMeasurements
- 流程和功能总结
VINS_Fusion部分代码讲解
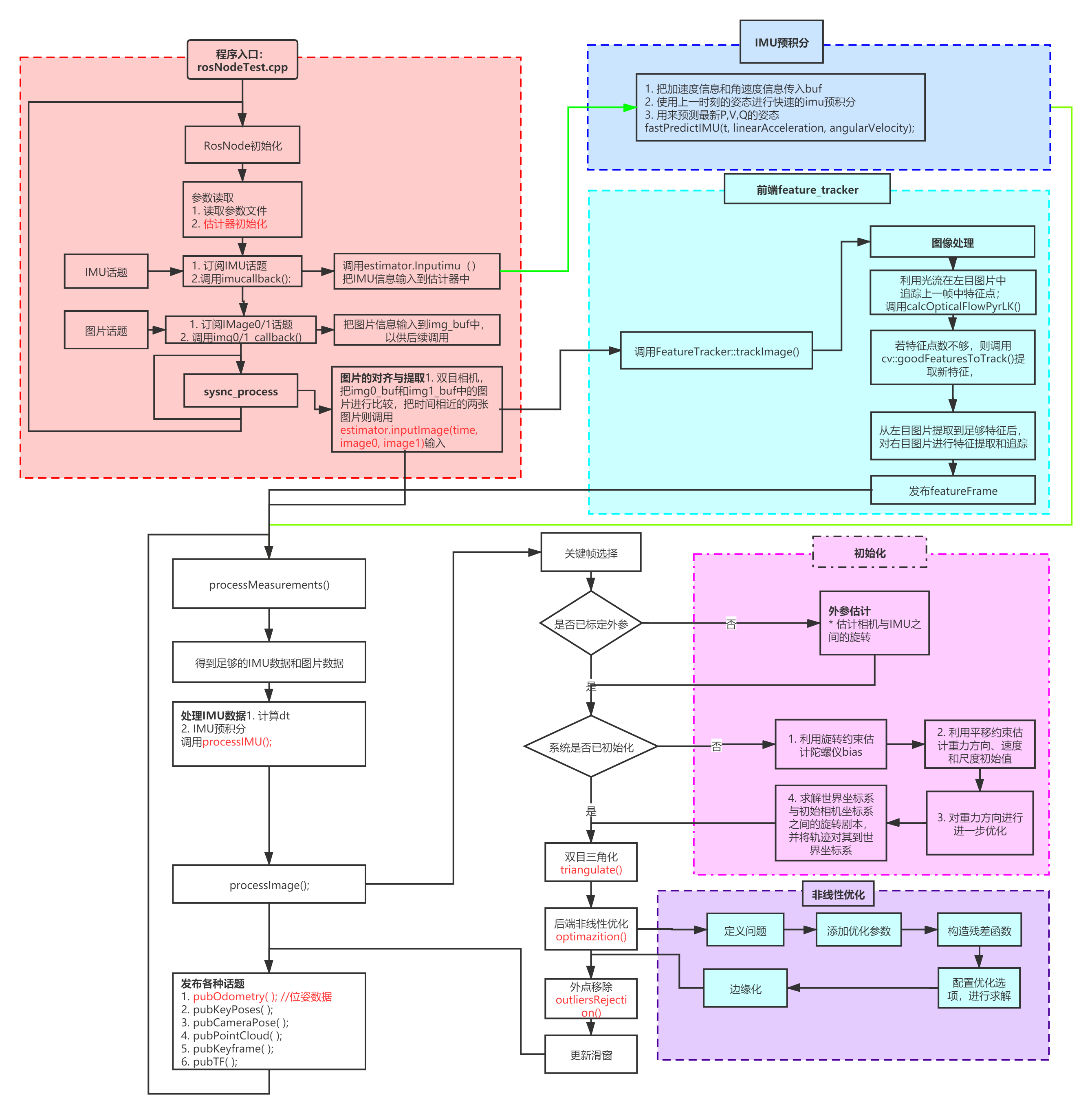
图片来源:VINS_Fusion 框架
estimator.cpp
Estimator::getIMUInterval
这段代码是一个名为 Estimator::getIMUInterval 的成员函数,用于从两个缓冲区(accBuf 和 gyrBuf)中提取一定时间范围dt内的加速度计(IMU 加速度数据)和陀螺仪(IMU 角速度数据)。具体来说,该函数执行以下操作:
- 检查缓冲区是否为空:如果
accBuf为空,则打印一条消息 “not receive imu” 并返回false。 - 验证时间范围的有效性:如果请求的时间范围
[t0, t1]在accBuf缓冲区的最后时间之前或等于它,则继续处理;否则,打印 “wait for imu” 并返回false。 - 移除过时的数据:通过循环移除
accBuf和gyrBuf中所有时间戳小于t0的数据对。 - 提取所需的数据:通过循环将
accBuf和gyrBuf中时间戳在[t0, t1)范围内的数据对添加到accVector和gyrVector中,并从缓冲区中移除这些数据。 - 添加最后一个数据点:将
accBuf和gyrBuf中第一个剩余的数据对(即刚好大于或等于t1的数据对)也添加到accVector和gyrVector中。 - 成功返回:完成上述步骤后,返回
true表示成功获取了所需的 IMU 数据。
以下是代码的详细注释版本:
bool Estimator::getIMUInterval(double t0, double t1, vector<pair<double, Eigen::Vector3d>> &accVector,
vector<pair<double, Eigen::Vector3d>> &gyrVector)
{
// 检查加速度计缓冲区是否为空
if(accBuf.empty())
{
printf("not receive imu\n"); // 打印错误信息
return false; // 返回失败状态
}
// 检查请求的时间范围是否有效
if(t1 <= accBuf.back().first)
{
// 移除所有时间戳小于 t0 的数据对
while (accBuf.front().first <= t0)
{
accBuf.pop();
gyrBuf.pop();
}
// 提取时间戳在 [t0, t1) 范围内的数据对
while (accBuf.front().first < t1)
{
accVector.push_back(accBuf.front()); // 添加加速度计数据对到结果向量
accBuf.pop(); // 从缓冲区移除已处理的数据对
gyrVector.push_back(gyrBuf.front()); // 添加陀螺仪数据对到结果向量
gyrBuf.pop(); // 从缓冲区移除已处理的数据对
}
// 添加最后一个数据点(刚好大于或等于 t1 的数据对)
accVector.push_back(accBuf.front());
gyrVector.push_back(gyrBuf.front());
}
else
{
printf("wait for imu\n"); // 打印等待信息
return false; // 返回失败状态
}
return true; // 返回成功状态
}
这个函数的主要目的是为了确保从 IMU 获取的数据是连续且准确的,在特定时间段内进行数据采集。
Estimator::processIMU
这段代码是 Estimator::processIMU 函数,用于处理 IMU(惯性测量单元)数据。具体来说,该函数负责初始化 IMU 数据、更新预积分器、存储传感器数据,并根据这些数据更新姿态、位置和速度估计。以下是详细的解释:
-
初始化 IMU 数据:
- 如果这是第一次接收到 IMU 数据 (
first_imu为false),则设置acc_0和gyr_0为当前的加速度计和陀螺仪读数,并将first_imu设置为true。
- 如果这是第一次接收到 IMU 数据 (
-
创建或获取预积分器:
- 如果当前帧的预积分器 (
pre_integrations[frame_count]) 尚未创建,则创建一个新的IntegrationBase实例,并使用初始加速度计和陀螺仪偏置 (Bas[frame_count]和Bgs[frame_count]) 进行初始化。
- 如果当前帧的预积分器 (
-
处理非第一帧的数据:
- 如果不是第一帧 (
frame_count != 0),则将当前的时间步长dt、线性加速度linear_acceleration和角速度angular_velocity推入到当前帧的预积分器中。 - 同时,将
dt、linear_acceleration和angular_velocity存储到相应的缓冲区 (dt_buf、linear_acceleration_buf和angular_velocity_buf) 中。 - 计算未经校准的加速度 (
un_acc_0和un_acc_1) 和角速度 (un_gyr)。 - 更新旋转矩阵
Rs[j],表示当前的姿态。 - 根据未经校准的加速度计算新的位置
Ps[j]和速度Vs[j]。
- 如果不是第一帧 (
-
更新上一时刻的 IMU 数据:
- 最后,将当前的加速度计和陀螺仪读数分别赋值给
acc_0和gyr_0,以便在下一帧中使用。
- 最后,将当前的加速度计和陀螺仪读数分别赋值给
以下是代码的详细注释版本:
void Estimator::processIMU(double t, double dt, const Vector3d &linear_acceleration, const Vector3d &angular_velocity)
{
// 如果这是第一次接收到 IMU 数据
if (!first_imu)
{
first_imu = true; // 设置标志位为已接收首次 IMU 数据
acc_0 = linear_acceleration; // 初始化初始加速度
gyr_0 = angular_velocity; // 初始化初始角速度
}
// 创建或获取当前帧的预积分器
if (!pre_integrations[frame_count])
{
pre_integrations[frame_count] = new IntegrationBase{acc_0, gyr_0, Bas[frame_count], Bgs[frame_count]};
}
// 处理非第一帧的数据
if (frame_count != 0)
{
// 将当前时间步长、线性加速度和角速度推入到预积分器
pre_integrations[frame_count]->push_back(dt, linear_acceleration, angular_velocity);
//if(solver_flag != NON_LINEAR)
tmp_pre_integration->push_back(dt, linear_acceleration, angular_velocity);
// 存储当前时间步长、线性加速度和角速度到缓冲区
dt_buf[frame_count].push_back(dt);
linear_acceleration_buf[frame_count].push_back(linear_acceleration);
angular_velocity_buf[frame_count].push_back(angular_velocity);
int j = frame_count;
// 计算未经校准的加速度和角速度
Vector3d un_acc_0 = Rs[j] * (acc_0 - Bas[j]) - g;
Vector3d un_gyr = 0.5 * (gyr_0 + angular_velocity) - Bgs[j];
// 更新旋转矩阵,表示当前的姿态
Rs[j] *= Utility::deltaQ(un_gyr * dt).toRotationMatrix();
// 计算未经校准的加速度
Vector3d un_acc_1 = Rs[j] * (linear_acceleration - Bas[j]) - g;
Vector3d un_acc = 0.5 * (un_acc_0 + un_acc_1);
// 更新位置和速度
Ps[j] += dt * Vs[j] + 0.5 * dt * dt * un_acc;
Vs[j] += dt * un_acc;
}
// 更新上一时刻的 IMU 数据
acc_0 = linear_acceleration;
gyr_0 = angular_velocity;
}
这个函数的主要目的是确保 IMU 数据被正确地处理和集成,以便进行后续的状态估计(如姿态、位置和速度)。
Estimator::processImage
下面是对 Estimator::processImage 函数的详细逐行解释:
void Estimator::processImage(const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> &image, const double header)
{
// 打印调试信息,表示新图像到来
ROS_DEBUG("new image coming ------------------------------------------");
// 打印调试信息,表示正在添加特征点
ROS_DEBUG("Adding feature points %lu", image.size());
// 检查是否可以通过视差添加特征点
if (f_manager.addFeatureCheckParallax(frame_count, image, td))
{
// 如果可以添加特征点,则设置边缘化标志为 MARGIN_OLD,表示这是一个关键帧
marginalization_flag = MARGIN_OLD;
//printf("keyframe\n");
}
else
{
// 否则,设置边缘化标志为 MARGIN_SECOND_NEW,表示这不是一个关键帧
marginalization_flag = MARGIN_SECOND_NEW;
//printf("non-keyframe\n");
}
// 根据边缘化标志打印调试信息
ROS_DEBUG("%s", marginalization_flag ? "Non-keyframe" : "Keyframe");
// 打印调试信息,表示正在解决当前帧
ROS_DEBUG("Solving %d", frame_count);
// 打印调试信息,表示当前特征点的数量
ROS_DEBUG("number of feature: %d", f_manager.getFeatureCount());
// 记录当前帧的时间戳
Headers[frame_count] = header;
// 创建一个新的 ImageFrame 对象,并存储图像数据和时间戳
ImageFrame imageframe(image, header);
// 将临时预积分器赋值给当前图像帧
imageframe.pre_integration = tmp_pre_integration;
// 将当前图像帧插入到所有图像帧的映射中
all_image_frame.insert(make_pair(header, imageframe));
// 创建一个新的临时预积分器对象
tmp_pre_integration = new IntegrationBase{acc_0, gyr_0, Bas[frame_count], Bgs[frame_count]};
// 如果正在进行外参标定(ESTIMATE_EXTRINSIC == 2)
if(ESTIMATE_EXTRINSIC == 2)
{
// 打印调试信息,提示正在进行外参标定
ROS_INFO("calibrating extrinsic param, rotation movement is needed");
// 如果不是第一帧
if (frame_count != 0)
{
// 获取前后两帧之间的对应特征点
vector<pair<Vector3d, Vector3d>> corres = f_manager.getCorresponding(frame_count - 1, frame_count);
Matrix3d calib_ric;
// 使用对应的特征点和预积分结果计算外参旋转矩阵
if (initial_ex_rotation.CalibrationExRotation(corres, pre_integrations[frame_count]->delta_q, calib_ric))
{
// 打印警告信息,提示外参旋转矩阵标定成功
ROS_WARN("initial extrinsic rotation calib success");
// 打印外参旋转矩阵
ROS_WARN_STREAM("initial extrinsic rotation: " << endl << calib_ric);
// 更新 ric 和 RIC 数组中的第一个元素
ric[0] = calib_ric;
RIC[0] = calib_ric;
// 设置 ESTIMATE_EXTRINSIC 为 1,表示已完成外参标定
ESTIMATE_EXTRINSIC = 1;
}
}
}
// 如果当前处于初始化阶段 (solver_flag == INITIAL)
if (solver_flag == INITIAL)
{
// 单目相机 + IMU 初始化
if (!STEREO && USE_IMU)
{
// 当达到窗口大小时进行初始化
if (frame_count == WINDOW_SIZE)
{
bool result = false;
// 如果未进行外参标定且时间间隔足够大
if(ESTIMATE_EXTRINSIC != 2 && (header - initial_timestamp) > 0.1)
{
// 进行初始结构估计
result = initialStructure();
// 更新初始时间戳
initial_timestamp = header;
}
// 如果初始化成功
if(result)
{
// 设置求解器标志为非线性模式
solver_flag = NON_LINEAR;
// 进行优化
optimization();
// 滑动窗口
slideWindow();
// 打印调试信息,提示初始化完成
ROS_INFO("Initialization finish!");
}
else
// 如果初始化失败,滑动窗口并丢弃最旧的数据
slideWindow();
}
}
// stereo + IMU initialization
if(STEREO && USE_IMU)
{
// 使用 PnP 方法初始化当前帧的姿态和位置
f_manager.initFramePoseByPnP(frame_count, Ps, Rs, tic, ric);
// 三角化当前帧的特征点,恢复其三维位置
f_manager.triangulate(frame_count, Ps, Rs, tic, ric);
if (frame_count == WINDOW_SIZE)
{
// 当达到窗口大小时,更新所有图像帧的姿态和位置
map<double, ImageFrame>::iterator frame_it;
int i = 0;
for (frame_it = all_image_frame.begin(); frame_it != all_image_frame.end(); frame_it++)
{
frame_it->second.R = Rs[i];
frame_it->second.T = Ps[i];
i++;
}
// 解算陀螺仪偏置
solveGyroscopeBias(all_image_frame, Bgs);
// 重新传播预积分器以应用新的陀螺仪偏置
for (int i = 0; i <= WINDOW_SIZE; i++)
{
pre_integrations[i]->repropagate(Vector3d::Zero(), Bgs[i]);
}
// 设置求解器标志为非线性优化
solver_flag = NON_LINEAR;
// 进行非线性优化
optimization();
// 滑动窗口
slideWindow();
ROS_INFO("Initialization finish!");
}
}
// stereo only initialization
if(STEREO && !USE_IMU)
{
// 使用 PnP 方法初始化当前帧的姿态和位置
f_manager.initFramePoseByPnP(frame_count, Ps, Rs, tic, ric);
// 三角化当前帧的特征点,恢复其三维位置
f_manager.triangulate(frame_count, Ps, Rs, tic, ric);
// 进行优化
optimization();
if(frame_count == WINDOW_SIZE)
{
// 设置求解器标志为非线性优化
solver_flag = NON_LINEAR;
// 滑动窗口
slideWindow();
ROS_INFO("Initialization finish!");
}
}
// 如果当前帧数小于窗口大小,则复制前一帧的状态
if(frame_count < WINDOW_SIZE)
{
frame_count++; // 增加帧计数
int prev_frame = frame_count - 1;
// 复制前一帧的位置、速度、姿态、加速度计偏置和陀螺仪偏置
Ps[frame_count] = Ps[prev_frame];
Vs[frame_count] = Vs[prev_frame];
Rs[frame_count] = Rs[prev_frame];
Bas[frame_count] = Bas[prev_frame];
Bgs[frame_count] = Bgs[prev_frame];
}
else
{
TicToc t_solve; // 计时开始
// 如果不使用 IMU,则仅使用立体视觉进行姿态初始化
if(!USE_IMU)
f_manager.initFramePoseByPnP(frame_count, Ps, Rs, tic, ric);
// 三角化当前帧的特征点,恢复其三维位置
f_manager.triangulate(frame_count, Ps, Rs, tic, ric);
// 进行优化
optimization();
// 检测并记录异常特征点索引
set<int> removeIndex;
outliersRejection(removeIndex);
// 移除异常特征点
f_manager.removeOutlier(removeIndex);
// 如果不是多线程模式,则在单线程中处理特征跟踪和预测
if (! MULTIPLE_THREAD)
{
featureTracker.removeOutliers(removeIndex); // 移除跟踪器中的异常特征点
predictPtsInNextFrame(); // 预测下一帧的特征点位置
}
// 输出求解时间
ROS_DEBUG("solver costs: %fms", t_solve.toc());
// 检测系统故障
if (failureDetection())
{
ROS_WARN("failure detection!"); // 发出警告
failure_occur = 1; // 标记故障发生
clearState(); // 清除状态
setParameter(); // 重设参数
ROS_WARN("system reboot!"); // 发出重启警告
return; // 返回并重启系统
}
// 滑动窗口
slideWindow();
// 移除失败的特征点
f_manager.removeFailures();
// 准备输出 VINS 关键位姿
key_poses.clear();
for (int i = 0; i <= WINDOW_SIZE; i++)
key_poses.push_back(Ps[i]);
// 更新最新状态
last_R = Rs[WINDOW_SIZE];
last_P = Ps[WINDOW_SIZE];
last_R0 = Rs[0];
last_P0 = Ps[0];
updateLatestStates();
}
}
流程和功能总结
-
记录新图像的到来:
- 打印调试信息,表示有新图像到来。
- 记录添加的特征点数量。
-
添加特征点并检查视差:
- 使用
f_manager.addFeatureCheckParallax方法添加特征点并检查视差。 - 根据视差结果判断当前帧是否为关键帧,并设置相应的
marginalization_flag。
- 使用
-
记录调试信息:
- 打印当前帧是否为关键帧、帧号、特征点数量以及时间戳。
-
创建和存储
ImageFrame对象:- 创建
ImageFrame对象并将其存储在all_image_frame中。 - 创建新的预积分器
tmp_pre_integration用于下一次处理。
- 创建
-
校准外参:
- 如果需要校准外参且满足条件,则进行外参校准。
- 获取对应帧之间的特征点对,并计算初始的旋转矩阵
ric。 - 更新
ric和RIC,并将ESTIMATE_EXTRINSIC设置为已完成校准。
-
初始化阶段处理:
- 单目 + IMU 初始化:
- 如果达到窗口大小,则尝试进行结构初始化。
- 如果初始化成功,则进行非线性优化和滑动窗口操作,完成初始化。
- 双目 + IMU 初始化:
- 使用 PnP 方法初始化姿态和位置。
- 通过三角化恢复特征点的三维位置。
- 达到窗口大小后,更新所有图像帧的姿态和位置,解算陀螺仪偏置,并重新传播预积分器。
- 完成初始化后进行非线性优化和滑动窗口操作。
- 双目初始化(不使用 IMU):
- 使用 PnP 方法初始化姿态和位置。
- 通过三角化恢复特征点的三维位置。
- 进行优化。
- 达到窗口大小后,完成初始化并进行非线性优化和滑动窗口操作。
- 复制前一帧的状态:
- 在未达到窗口大小之前,复制前一帧的状态(位置、速度、姿态、加速度计偏置和陀螺仪偏置)。
- 单目 + IMU 初始化:
-
正常运行阶段:
- 如果不使用 IMU,则仅使用立体视觉进行姿态初始化。
- 通过三角化恢复特征点的三维位置。
- 进行优化。
- 检测并移除异常特征点。
- 如果不是多线程模式,则在单线程中处理特征跟踪和预测。
- 输出求解时间。
- 检测系统故障,如有故障则清除状态并重设参数。
- 滑动窗口并移除失败的特征点。
- 准备输出 VINS 关键位姿。
- 更新最新状态。
这个函数的核心功能是通过处理图像帧中的特征点来进行相机姿态和位置的估计,并结合 IMU 数据(如果启用)来提高估计的准确性。它还包括初始化阶段的关键步骤和正常运行阶段的状态维护与优化。
Estimator::processMeasurements
下面是 processMeasurements 函数的详细流程和功能总结,并附带逐行代码注释:
void Estimator::processMeasurements()
{
while (1)
{
//printf("process measurments\n");
TicToc t_process; // 开始计时处理测量数据的时间
// 从特征缓冲区中获取最新的特征数据
pair<double, map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>>> feature;
vector<pair<double, Eigen::Vector3d>> accVector, gyrVector; // 存储加速度计和陀螺仪数据
if(!featureBuf.empty()) // 检查特征缓冲区是否为空
{
feature = featureBuf.front(); // 获取特征缓冲区的第一个元素
curTime = feature.first + td; // 设置当前时间为特征时间加上时间延迟
// 等待 IMU 数据可用
while(1)
{
if ((!USE_IMU) || IMUAvailable(feature.first + td)) // 如果不使用 IMU 或者 IMU 数据可用
break; // 继续处理
else
{
printf("wait for imu ... \n"); // 打印等待 IMU 数据的消息
if (!MULTIPLE_THREAD) // 如果不是多线程模式
return; // 返回并退出函数
std::chrono::milliseconds dura(5); // 等待 5 毫秒
std::this_thread::sleep_for(dura);
}
}
mBuf.lock(); // 锁定互斥锁以访问共享资源
if(USE_IMU)
getIMUInterval(prevTime, curTime, accVector, gyrVector); // 获取指定时间间隔内的 IMU 数据
featureBuf.pop(); // 从特征缓冲区移除已处理的数据
mBuf.unlock(); // 解锁互斥锁
if(USE_IMU) // 如果使用 IMU
{
if(!initFirstPoseFlag) // 如果尚未初始化第一帧的姿态
initFirstIMUPose(accVector); // 初始化第一帧的姿态
for(size_t i = 0; i < accVector.size(); i++) // 处理每个 IMU 数据点
{
double dt;
if(i == 0)
dt = accVector[i].first - prevTime; // 计算第一个数据点的时间间隔
else if (i == accVector.size() - 1)
dt = curTime - accVector[i - 1].first; // 计算最后一个数据点的时间间隔
else
dt = accVector[i].first - accVector[i - 1].first; // 计算中间数据点的时间间隔
processIMU(accVector[i].first, dt, accVector[i].second, gyrVector[i].second); // 处理 IMU 数据
}
}
processImage(feature.second, feature.first); // 处理图像特征数据
prevTime = curTime; // 更新前一帧的时间为当前帧的时间
printStatistics(*this, 0); // 打印统计信息
std_msgs::Header header; // 创建 ROS 消息头
header.frame_id = "world"; // 设置坐标系为世界坐标系
header.stamp = ros::Time(feature.first); // 设置时间戳
pubOdometry(*this, header); // 发布里程计信息
pubKeyPoses(*this, header); // 发布关键位姿信息
pubCameraPose(*this, header); // 发布相机姿态信息
pubPointCloud(*this, header); // 发布点云信息
pubKeyframe(*this); // 发布关键帧信息
pubTF(*this, header); // 发布 TF 变换信息
printf("process measurement time: %f\n", t_process.toc()); // 打印处理测量数据所花费的时间
}
if (!MULTIPLE_THREAD) // 如果不是多线程模式
break; // 退出循环
std::chrono::milliseconds dura(2); // 等待 2 毫秒
std::this_thread::sleep_for(dura);
}
}
流程和功能总结
-
无限循环:
- 进入一个无限循环,持续处理测量数据。
-
开始计时:
- 使用
TicToc类开始计时处理测量数据的时间。
- 使用
-
获取特征数据:
- 从特征缓冲区
featureBuf中获取最新的特征数据。 - 将特征数据的时间戳加上时间延迟
td设置为当前时间curTime。
- 从特征缓冲区
-
等待 IMU 数据:
- 如果启用了 IMU,检查指定时间
feature.first + td是否有可用的 IMU 数据。 - 如果没有可用的 IMU 数据,则打印等待消息并休眠一段时间(5 毫秒),直到数据可用或不在多线程模式下返回。
- 如果启用了 IMU,检查指定时间
-
锁定互斥锁:
- 使用
mBuf.lock()锁定互斥锁以访问共享资源。
- 使用
-
获取 IMU 数据:
- 如果启用了 IMU,调用
getIMUInterval方法获取指定时间间隔内的 IMU 数据(加速度计和陀螺仪数据)。 - 从特征缓冲区
featureBuf移除已处理的数据。 - 使用
mBuf.unlock()解锁互斥锁。
- 如果启用了 IMU,调用
-
处理 IMU 数据:
- 如果启用了 IMU 且尚未初始化第一帧的姿态,则调用
initFirstIMUPose方法进行初始化。 - 遍历获取到的 IMU 数据,计算每个数据点之间的时间间隔
dt,并调用processIMU方法处理每个 IMU 数据点。
- 如果启用了 IMU 且尚未初始化第一帧的姿态,则调用
-
处理图像特征数据:
- 调用
processImage方法处理图像特征数据。
- 调用
-
更新时间:
- 将
prevTime更新为当前时间curTime。
- 将
-
打印统计信息:
- 调用
printStatistics方法打印系统统计信息。
- 调用
-
发布信息:
- 创建 ROS 消息头
header,设置坐标系为世界坐标系,并设置时间戳。 - 调用相应的发布方法发布里程计信息、关键位姿信息、相机姿态信息、点云信息、关键帧信息和 TF 变换信息。
- 创建 ROS 消息头
-
打印处理时间:
- 打印处理测量数据所花费的时间。
-
检查多线程模式:
- 如果不在多线程模式下,则退出循环。
-
休眠:
- 在多线程模式下,休眠 2 毫秒后继续下一次循环。
这个函数的核心功能是通过不断循环处理图像特征数据和 IMU 数据来维持系统的状态估计,并在必要时进行初始化和优化。它还包括发布各种传感器数据和估计结果的功能。

















 666
666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









