







记录一下课程的主要内容,用于复盘和厘清思路。
第一讲
matlab2018,carsim2019
书籍:《车辆动力学及控制》
第二讲
MPC优于PID和LQR,但计算量大,只适用于仿真
三个坐标系:绝对坐标系,车身坐标系,自然坐标系(Frenet坐标系)
右手系:右手的拇指、食指、中指分别为x、y、z的正方向
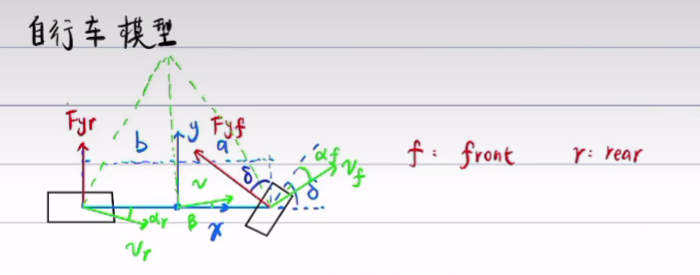
自行车模型
理论力学瞬心法
运动学模型(认为轮胎不变形)
适用于低速情况,转弯半径大,β=0
思路:前后车长各用一次余弦定理
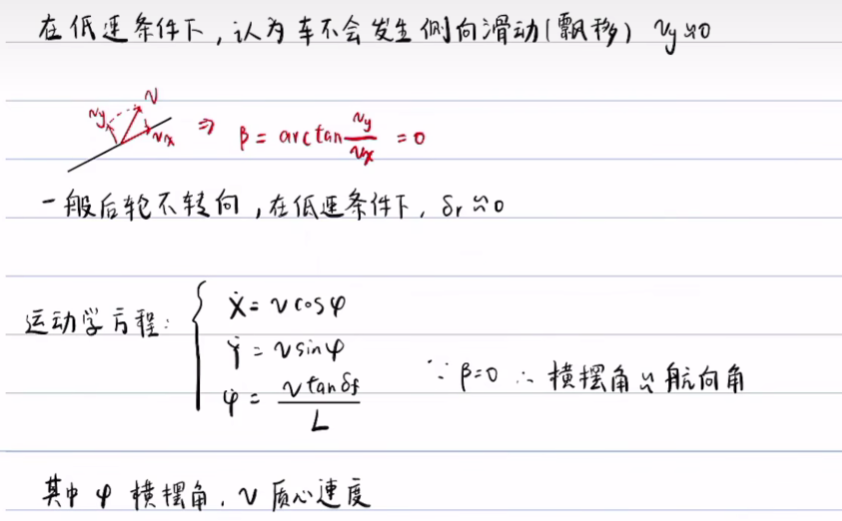
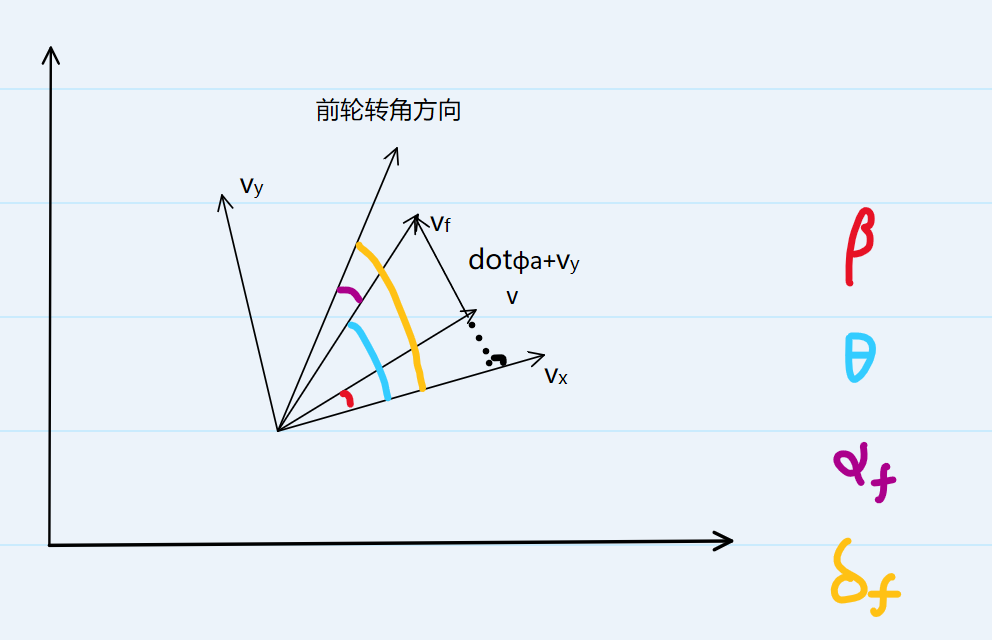
前轮转角、速度与质心速度合成:
第三讲 轮胎侧偏和车辆动力学
目标:建立横向加速度和角加速度与前轮转角的关系,建立状态方程
动力学模型 考虑轮胎特性,适用于高速行驶;选取Frenet坐标系,可以横纵解耦
考虑轮胎侧偏力:F=cα
牛二和力矩方程
Frenet坐标系横纵解耦
自行车模型:
刚体的平面运动(百度文库《刚体的平面运动》P17中描述的速度合成法)
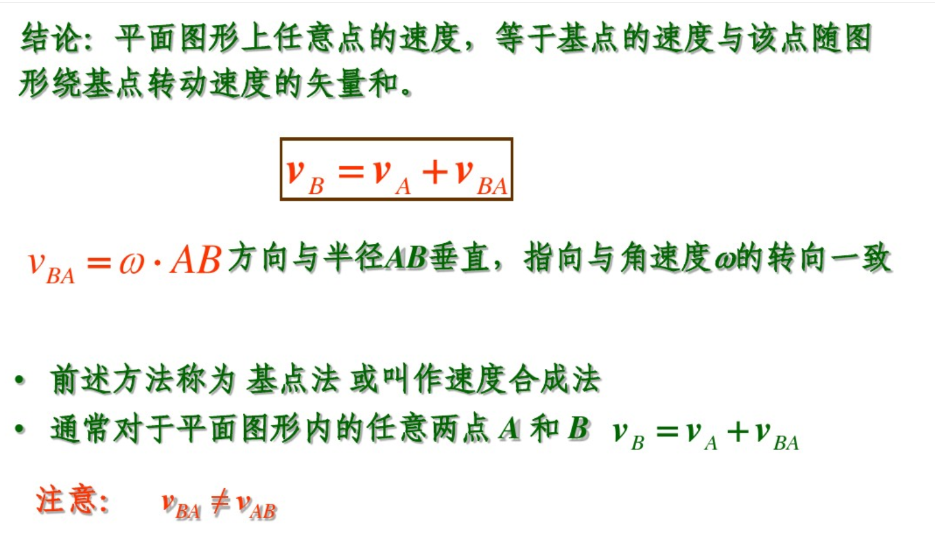
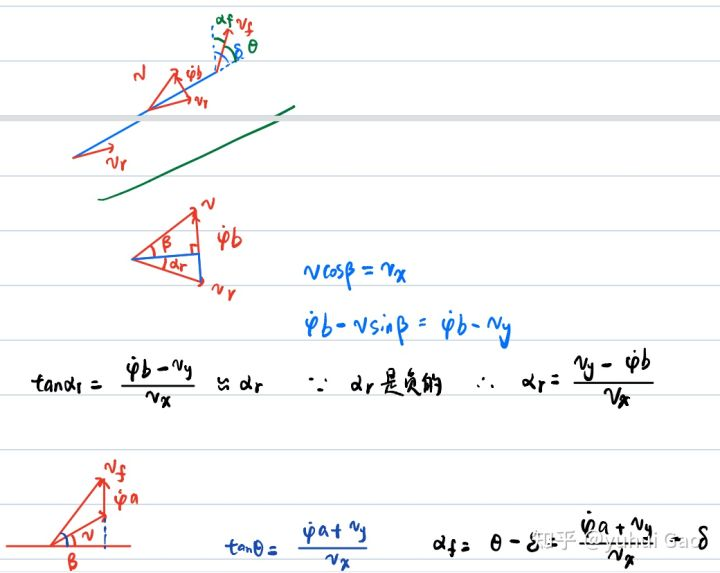
结论:
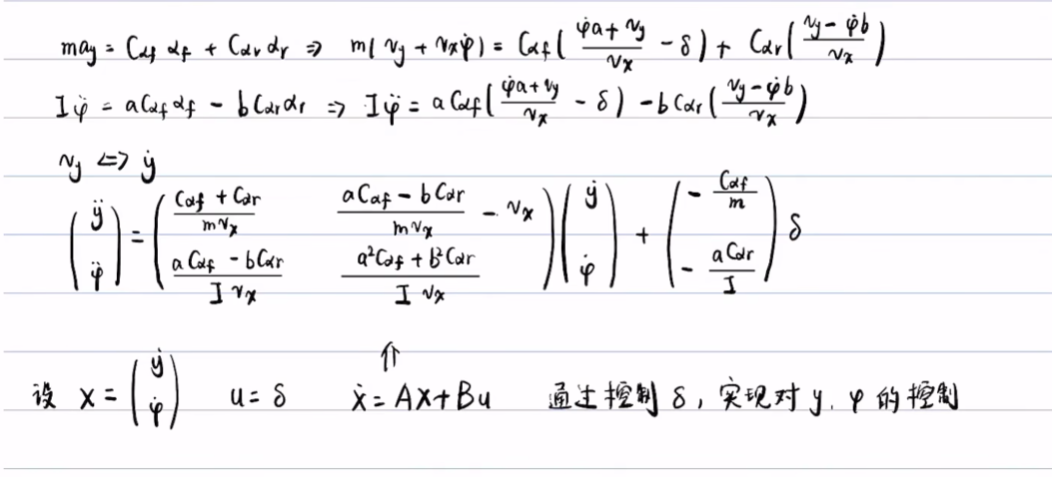
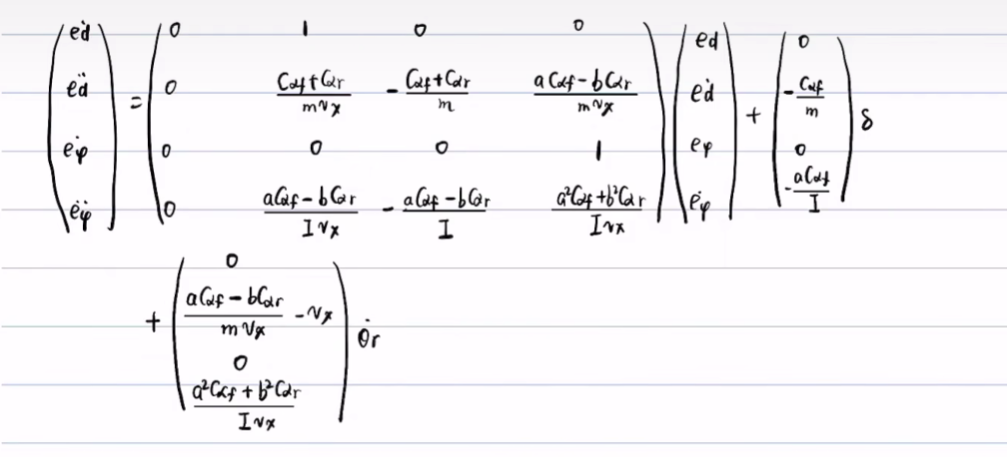
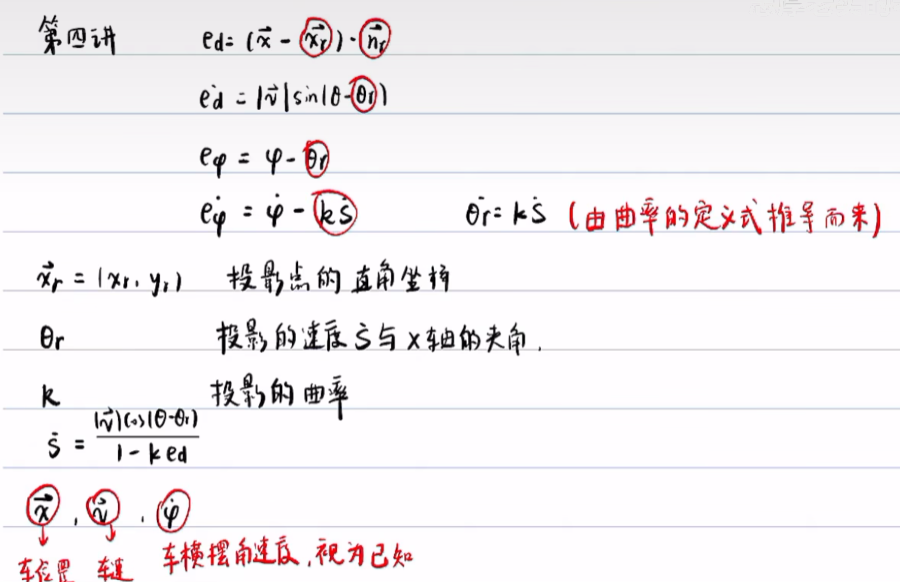
第四讲 坐标变换与横向误差
目标:建立误差的空间方程
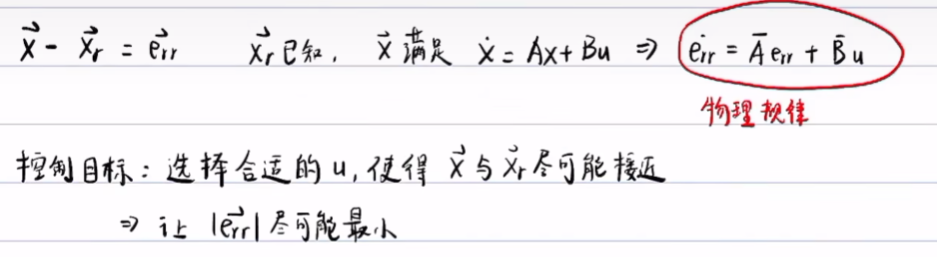
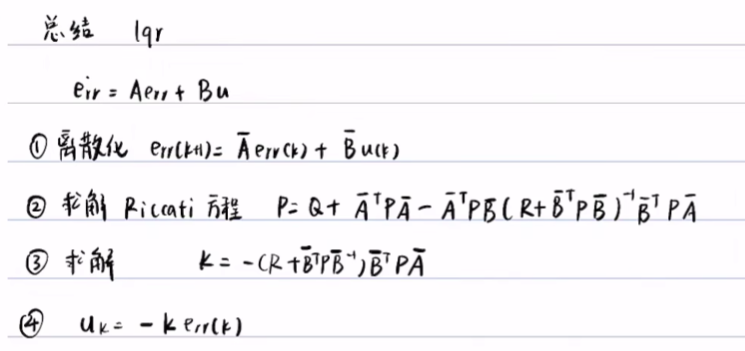
解决方法:LQR/DLQR
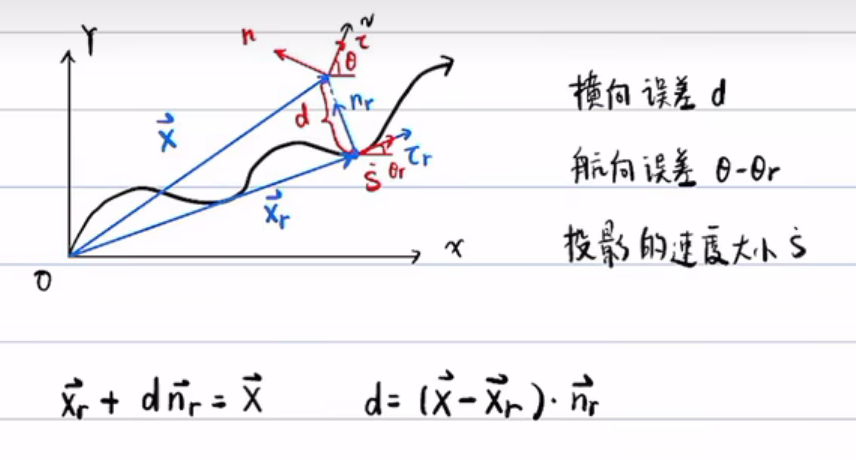
结论
与vy和φ联系起来
第五讲 DLQR
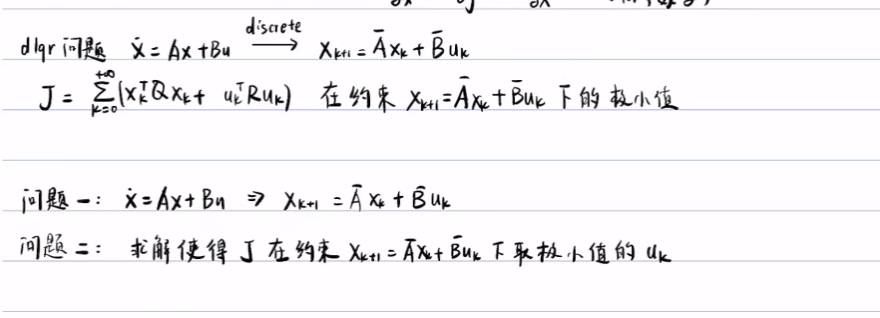
离散化:向前欧拉法、中点欧拉法
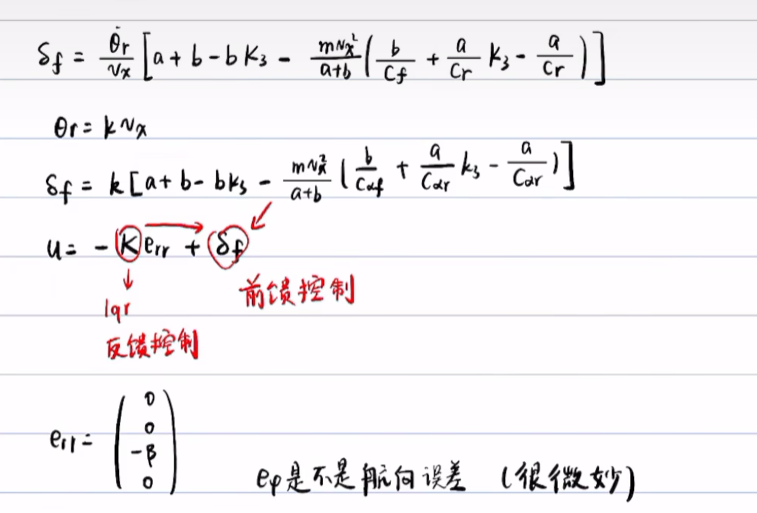
第六讲 前馈控制
目标:消除稳态误差
结论
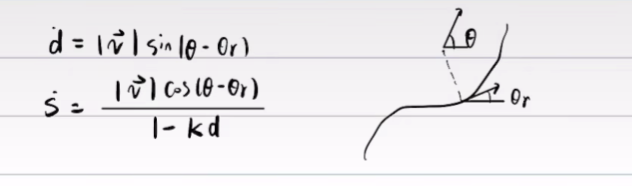
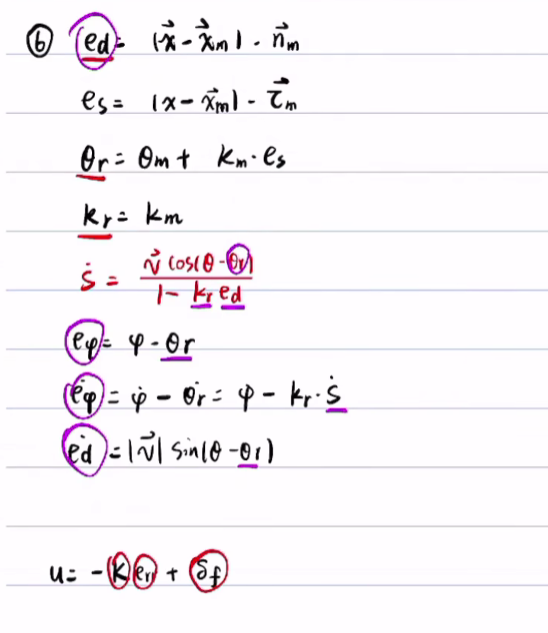
第七讲 离散轨迹的误差
目标:寻找距离投影点的最近离散点
结论
第八讲 控制流程图















 1553
1553











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









