






出现报错:
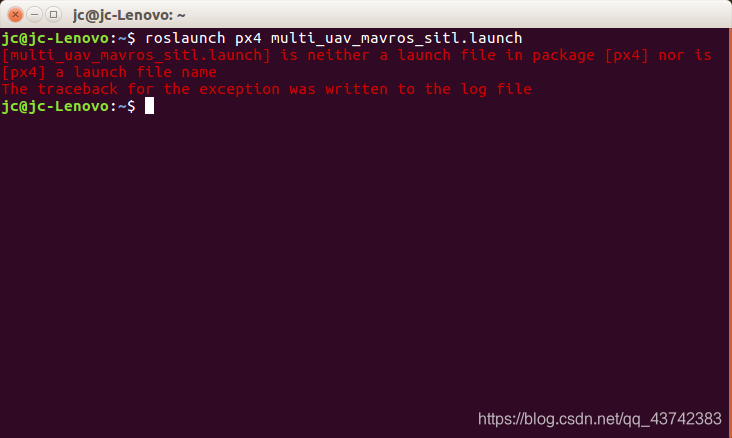
缺少配置文件,需要添加路径到文件中;
在根目录下打开终端输入:

出现下面一个界面:(蓝色是我添加的)


保存退出;
重新进行刚开始的操作:


使用默认的.launch文件打开三架无人机的仿真;














11-26
 1171
1171
1171
08-05
662
662
09-05
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









