










本篇文章介绍一下如何在Ubuntu中实现MATLAB与ROS的通讯,主要分为四部分:一、建立MATALB与ROS的通讯、二、使用MATLAB观测ROS中小乌龟的运动信息、三、使用MATLAB发布指令控制小乌龟运动、四、利用MATLAB生成ROS代码,实现对小乌龟运动的控制。
注:本文转载于古月居,原文链接如下:
https://www.guyuehome.com/35551
本篇文章我首发在古月居,因版权原因,在CSDN不能放全文,只能放一小部分(本篇文章共四部分,在CSDN仅放第一部分),欢迎大家前往古月居查看完整文章!!!链接如上↑↑↑,或者你可以点击下面的超链接跳转:
详细介绍如何在Ubuntu中实现MATLAB与ROS的通讯,借助MATALB进行ROS开发(点击可跳转)
一、建立MATALB与ROS的通讯
1、在终端输入以下命令查看本机地址
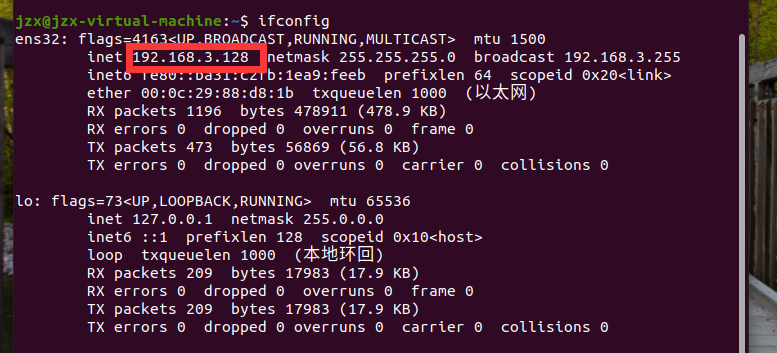
ifconfig
这时候有的小伙伴会像我一样报错:
Command ‘ifconfig’ not found, did you mean: command ‘ifconfig’ from deb net-tools (1.60+git20180626.aebd88e-1ubuntu1)Try: sudo apt install

这是由于没有安装net-tools造成的,按照提示输入以下命令安装就可以了
sudo apt install net-tools

这时候再次输入ifconfig命令就可以查看了,如下图所示我目前的IP是192.168.3.128
2、将本机IP写入到.bashrc文件
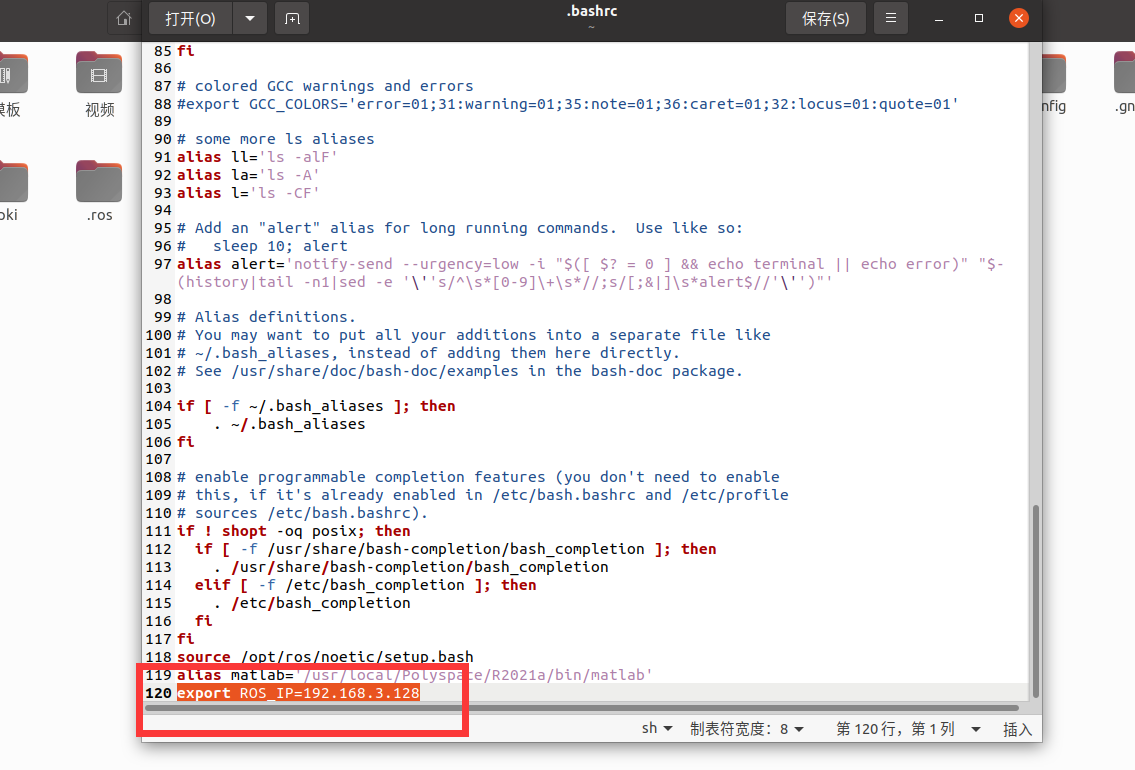
打开home文件夹,按Ctrl+h显示隐藏的文件,选择.bashrc并打开(注意并不一定是在home文件夹下,如果没有就往下一级看看有没有,比如我的就在home/jzx/ 下,并没有在home文件夹下)
打开后在最后加入以下命令(后面的IP改为你的电脑的IP),然后保存退出
export ROS_IP=192.168.3.128
3、启动roscore,并获取ROS输出的IP
在终端输入roscore启动,可以发现此时roscore会输出一个IP如下图所示:

4、打开MATLAB,建立与ROS的连接
在MATLAB的命令行窗口输入以下语句后,半部分就是我们上一步得到的ROS输出的IP
setenv('ROS_MASTER_URI','http://jzx-virtual-machine:11311')
在MATLAB的命令行窗口输入rosinit,得到以下反馈信息,说明MATALB与ROS已经成功建立连接

注:本文转载于古月居,原文链接如下:
https://www.guyuehome.com/35551
本篇文章我首发在古月居,因版权原因,在CSDN不能放全文,只能放一小部分(本篇文章共四部分,在CSDN仅放第一部分),欢迎大家前往古月居查看完整文章!!!链接如上↑↑↑,或者你可以点击下面的超链接跳转:
详细介绍如何在Ubuntu中实现MATLAB与ROS的通讯,借助MATALB进行ROS开发(点击可跳转)
















 1606
1606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











