







 作者在进行GNSS/INS/LIDAR融合定位时,遇到了lio-sam开源算法中的时间戳同步问题。禾赛XT-16雷达的时间戳与IMU不匹配,导致数据无法正常同步。通过简单修改雷达驱动代码,将时间戳定义改为ros::Time::now(),成功解决了同步问题,但可能影响精度。目前运行结果存在地图重影,可能与时间戳、传感器标定或IMU工作频率(100Hz)有关,欢迎专家提供更好的方案。
作者在进行GNSS/INS/LIDAR融合定位时,遇到了lio-sam开源算法中的时间戳同步问题。禾赛XT-16雷达的时间戳与IMU不匹配,导致数据无法正常同步。通过简单修改雷达驱动代码,将时间戳定义改为ros::Time::now(),成功解决了同步问题,但可能影响精度。目前运行结果存在地图重影,可能与时间戳、传感器标定或IMU工作频率(100Hz)有关,欢迎专家提供更好的方案。
课题是多传感器融合,将GNSS/INS/LIDAR做融合定位导航,故考虑使用lio-sam开源算法,在此记录一下我在适配传感器数据时遇到的一些问题;
运行lio-sam
源码安装教程参考文章
项目搭建和传感器标定参考文章
项目的部署和安装就不多做赘述了,以上两篇文章写得很棒,大家可以参考~(侵删)
遇到的问题
其实也就一个比较大的问题,就是时间戳的问题,lio-sam中对传感器做了时间戳软同步,涉及到时间软同步,那么就要考虑LIDAR/IMU两个传感器的时间戳了。
禾赛PandarXT-16时间戳

可以看到,对于这款PandarXT-16雷达,使用厂家提供的ROS驱动程序中的时间戳与IMU的完全对不上,这样也就导致了就算数据格式做了适配,程序仍然会在时间同步的地方一直出不来,那么在RVIZ中也就一直见不到采集的数据。
解决
笔者的解决办法很简单粗暴,因为笔者的IMU的ROS驱动代码中对时间戳的定义是ros::Time::now(),笔者也就直接修改了雷达驱动中对于时间戳的定义。
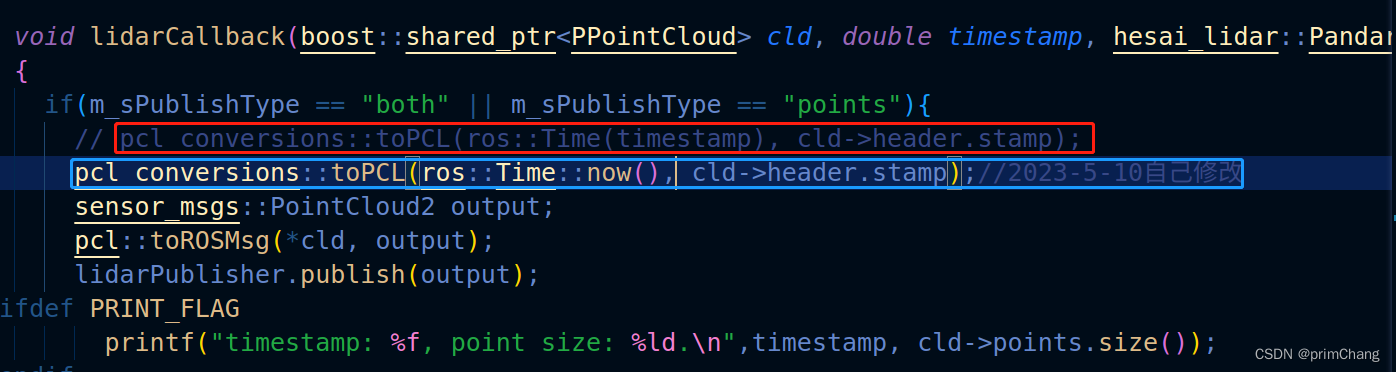
图中红色框是厂家的底层驱动代码,蓝色的框是笔者自己修改的代码,至此,保存、编译、运行直接一套带走!
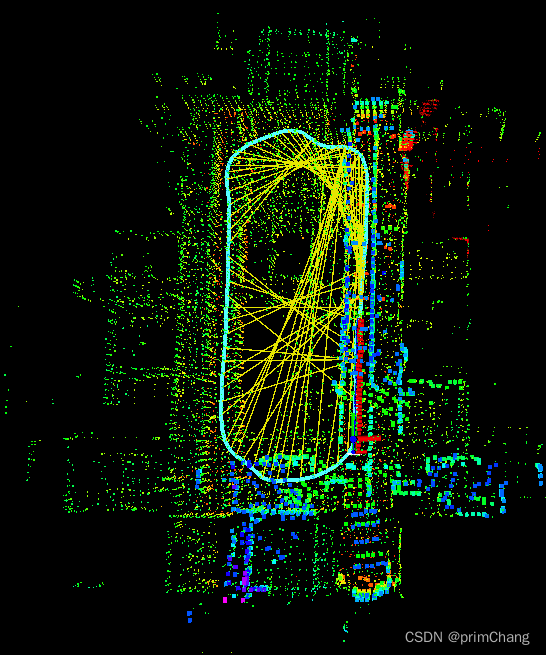
最终效果
注
笔者不确定这样修改后是否会对最终运行出的结果精度有影响,因为笔者也只算是入门,截止到文章发布,笔者自己跑的几次数据中地图都有重影,不确定是否与时间戳有关,也有可能是因为传感器标定和IMU的工作频率有关(上图中的IMU频率使用的100Hz),如果有大佬有更好的方案或者对本文有更好的建议,望在评论区与我交流~
希望本篇对手上雷达型号与笔者一致或同一品牌的各位有用~

















 3746
3746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









