







三相永磁同步电机的控制方法之无传感器控制
无传感器控制(Sensorless Control)是一种通过估算电机转子位置和速度,而不依赖物理位置传感器(如霍尔传感器或编码器)的控制方法。它通过检测电机的电流、电压或其他物理量,间接获取转子位置信息,从而实现高效控制。
无传感器控制在成本、可靠性和维护性方面具有显著优势,广泛应用于工业自动化、电动汽车、家用电器等领域。
无传感器控制的原理
-
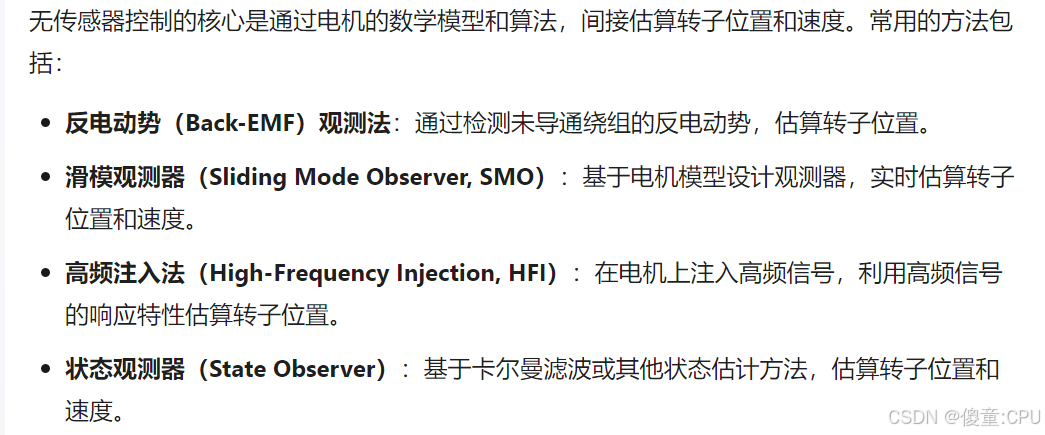
基本原理
-
反电动势观测法

-
滑模观测器

-
高频注入法

-
状态观测器

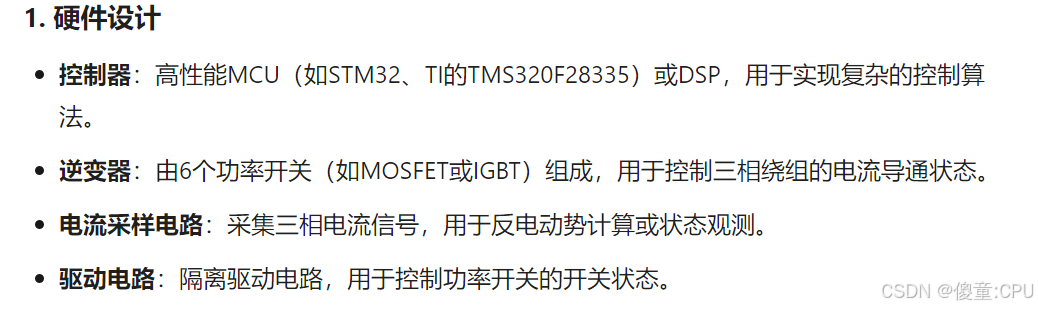
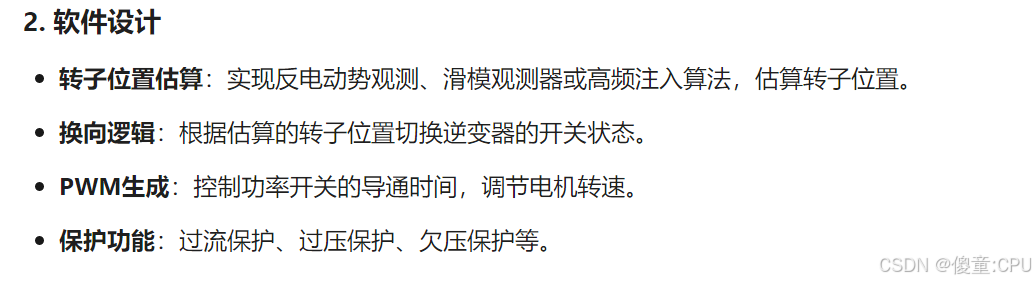
无传感器控制的设计
以下是一个基于反电动势观测法的三相无传感器控制的C语言实现案例,假设电机为三相无刷直流电机(BLDC),使用STM32微控制器。
定义电机控制所需的基本变量。
#include "stm32f4xx_hal.h"
// 定义三相电流和电压
float ia, ib, ic; // 三相电流
float va, vb, vc; // 三相电压
// 定义反电动势
float e_alpha, e_beta; // Clarke变换后的反电动势
float e_d, e_q; // Park变换后的反电动势
// 定义转子位置和速度
float theta = 0.0; // 转子位置(电角度)
float speed = 0.0; // 转子速度(rad/s)
// 定义PI控制器
float id_ref = 0.0, iq_ref = 0.0; // d轴和q轴参考电流
float id_error, iq_error;
float id_integral = 0.0, iq_integral = 0.0;
float kp_id = 0.1, ki_id = 0.01; // d轴PI参数
float kp_iq = 0.1, ki_iq = 0.01; // q轴PI参数
Clarke变换:将三相电流或电压信号转换为两相静止坐标系(α-β)。
void Clarke_Transform(float ia, float ib, float ic, float *ialpha, float *ibeta) {
*ialpha = ia; // Ia remains the same
*ibeta = (ib - ic) / sqrt(3); // Beta component calculation
}
反电动势估算:通过Clarke变换后的信号,估算反电动势。
void BackEMF_Estimation(float ialpha, float ibeta, float va_alpha, float vb_beta, float *e_alpha, float *e_beta) {
*e_alpha = va_alpha - ialpha; // 反电动势计算
*e_beta = vb_beta - ibeta;
}
Park变换:将两相静止坐标系(α-β)的信号转换为同步旋转坐标系(d-q)。
void Park_Transform(float ialpha, float ibeta, float theta, float *id, float *iq) {
*id = ialpha * cos(theta) + ibeta * sin(theta); // d轴分量
*iq = -ialpha * sin(theta) + ibeta * cos(theta); // q轴分量
}
反电动势积分法估算位置:通过反电动势的积分计算转子位置。
void Estimate_Position(float e_alpha, float e_beta, float *theta) {
static float angle_integral = 0.0;
angle_integral += atan2(e_beta, e_alpha); // 积分计算角度
*theta = fmod(angle_integral, 2 * M_PI); // 限制角度范围为[0, 2π]
}
PI控制:实现d轴和q轴的PI控制,调节电流和速度。
void PI_Controller(float setpoint, float feedback, float *integral, float kp, float ki, float *output) {
float error = setpoint - feedback;
*integral += error;
*output = kp * error + ki * (*integral);
}
主控制循环:在主循环中实现无传感器控制的完整流程。
void Sensorless_Control_Loop() {
float ialpha, ibeta, va_alpha, vb_beta;
float id, iq, vd, vq;
// 1. Clarke变换
Clarke_Transform(ia, ib, ic, &ialpha, &ibeta);
// 2. 反电动势估算
BackEMF_Estimation(ialpha, ibeta, va, vb, &e_alpha, &e_beta);
// 3. 位置估算
Estimate_Position(e_alpha, e_beta, &theta);
// 4. Park变换
Park_Transform(ialpha, ibeta, theta, &id, &iq);
// 5. PI控制(d轴和q轴)
PI_Controller(id_ref, id, &id_integral, kp_id, ki_id, &vd);
PI_Controller(iq_ref, iq, &iq_integral, kp_iq, ki_iq, &vq);
// 6. 逆Park变换
float valpha, vbeta;
Inverse_Park_Transform(vd, vq, theta, &valpha, &vbeta);
// 7. 逆Clarke变换,生成PWM信号
float va_out, vb_out, vc_out;
Inverse_Clarke_Transform(valpha, vbeta, &va_out, &vb_out, &vc_out);
Generate_PWM(va_out, vb_out, vc_out);
}
PWM生成函数:根据控制信号生成PWM波形。
void Generate_PWM(float va, float vb, float vc) {
// 将电压值映射到PWM占空比
float duty_a = (va + 1.0) / 2.0; // 假设电压范围为[-1, 1]
float duty_b = (vb + 1.0) / 2.0;
float duty_c = (vc + 1.0) / 2.0;
// 设置PWM占空比(假设使用STM32 HAL库)
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, duty_a * 1000); // 假设PWM分辨率为1000
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, duty_b * 1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_3, duty_c * 1000);
}
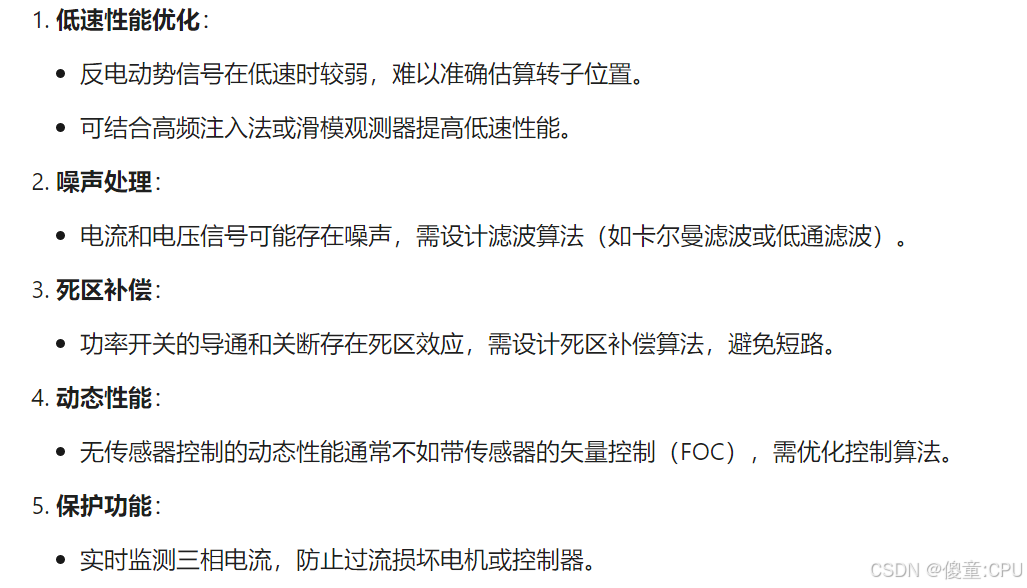
实际应用中的注意事项


















 613
613

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











