






RVIZ 使用的时候如果fixed frame选项设置不正确,那么就会无法显示显示相应的数据信息,并提示一下错误:“For frame [XX]: Fixed Frame [map] does not exist”
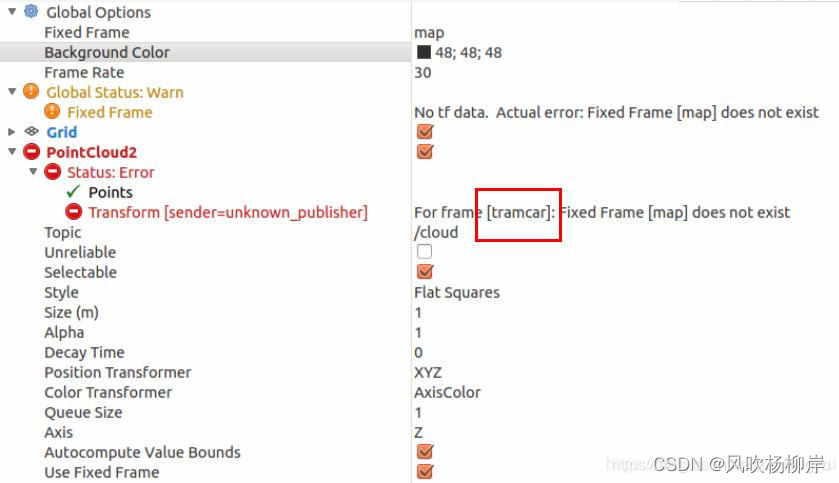
topic报frame 、transform之类错误,就有两个办法,
1.把global fixed frame设成topic自己所在的坐标系,按照上图的显示,应该改为tramcar;
2.用tf包工具发布global fixed frame到topic所在坐标系的tf关系,例如:
rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 map xxx 100 ;//将xxx映射为map
那么还有一个疑问: topic自己所在的坐标系名字(上图中为tramcar)是在那里设定的?
我们知道topic这一项(即话题的名字,上图中对应的是/cloud)是在程序里面指定的,同理消息的参考坐标系信息记录在消息的frame_id中,该值可以在程序中直接通过给消息头的frame_id字段赋值的方式指定也可以在.cfg配置文件中事先指定。查看一个消息的 fix frame:
rostopic echo /cloud | grep frame_id
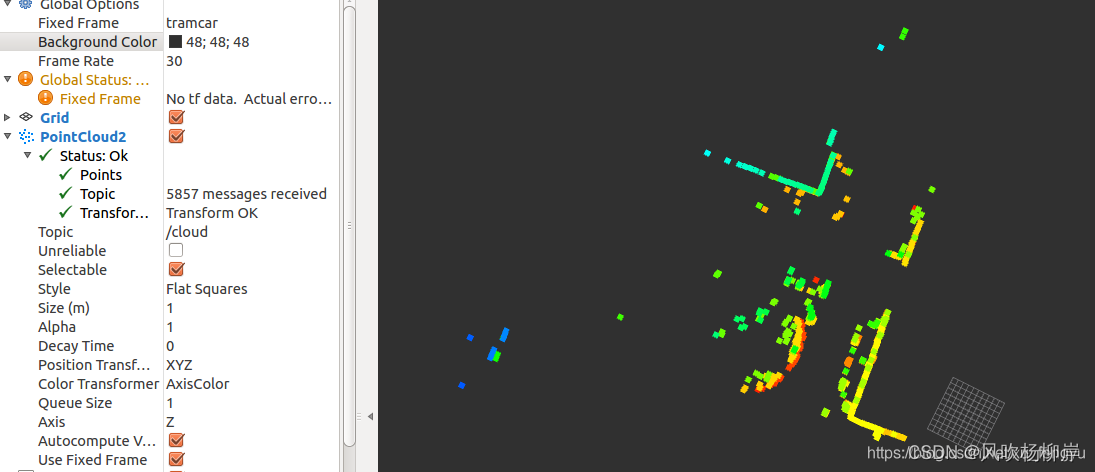
修改完正确的Fixed Frame:

















 4340
4340

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









