







一、概述
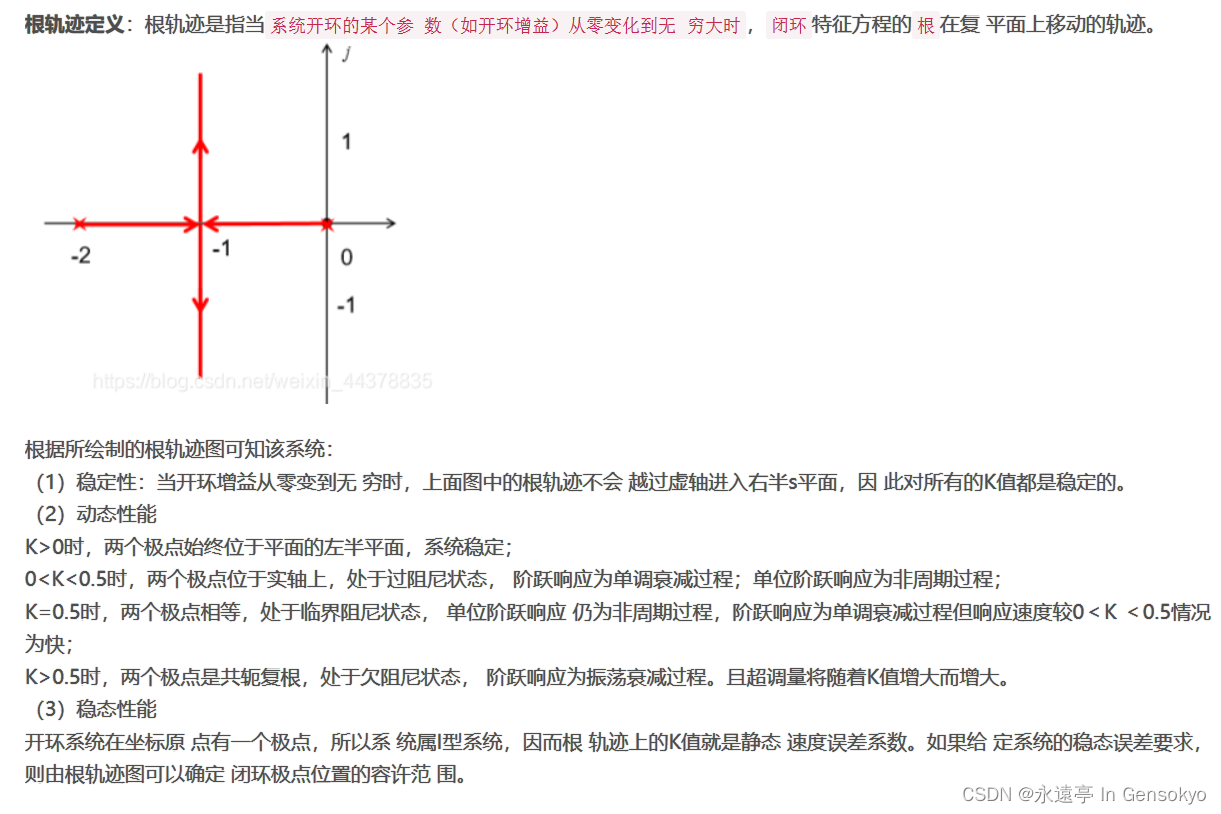
因为闭环极点在复平面的位置很大程度上决定了两点:
- 系统的稳定性
- 系统的性能指标
所以研究根的位置就很重要,而根轨迹法就是用来确定当某个参数变化时系统闭环极点在复平面上移动的轨迹。可以理解为:根轨迹就是系统极点关于参数K的函数曲线。
二、根轨迹的绘制
1.整理特征方程为标准形式
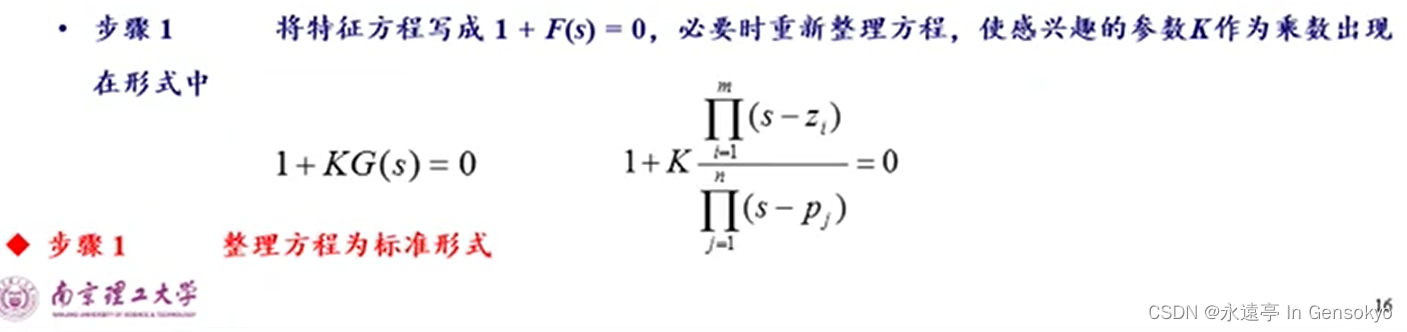 开环传函这样的写法叫首1型,即s的系数为1(首1型只在根轨迹这里用到,注意区分尾1型)。
开环传函这样的写法叫首1型,即s的系数为1(首1型只在根轨迹这里用到,注意区分尾1型)。
2.确定开环零极点
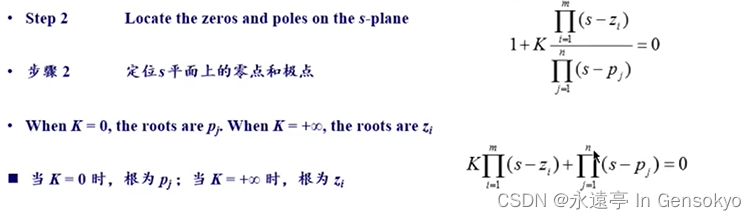
零点用z表示,极点用p表示。
根轨迹开始于开环极点,终止于开环零点。
这句话非常重要。
3.确定根轨迹分支数
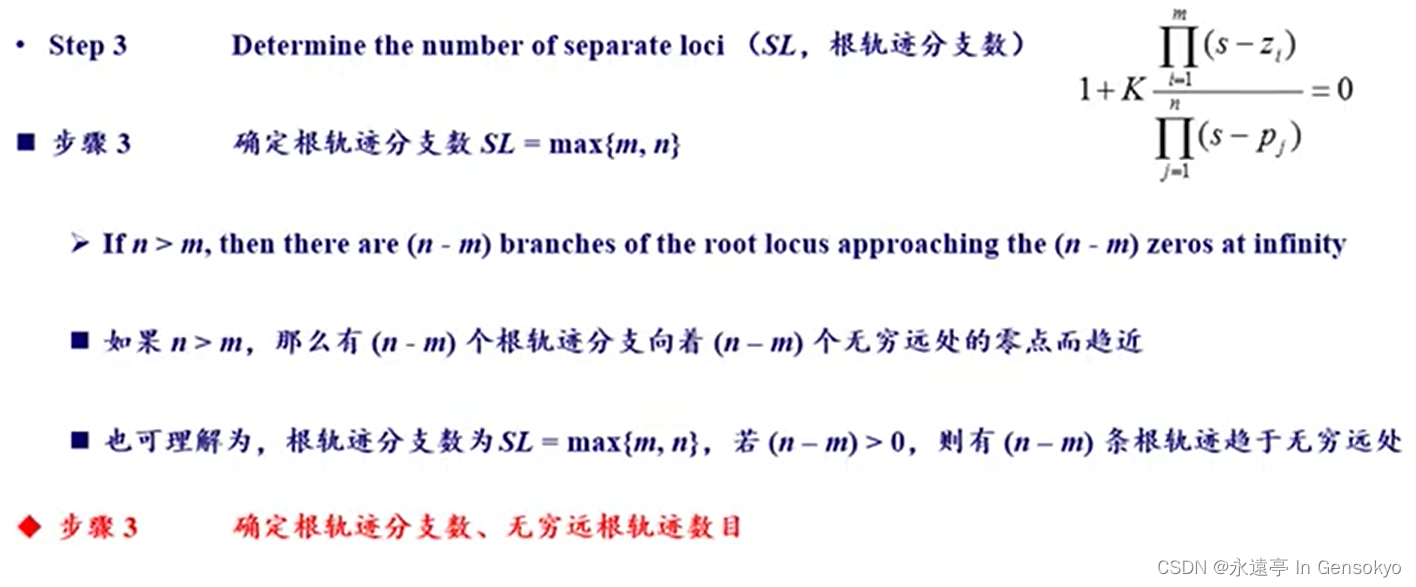
其中m即开环零点个数,n即开环极点个数。
这个什么意思?首先就是根轨迹起始于极点,终止于零点;如果n>m,即极点数比零点数多,就会有m条根轨迹从零点到极点,而另外n-m条根轨迹从极点趋于无穷远。
4.定位根轨迹的实轴部分
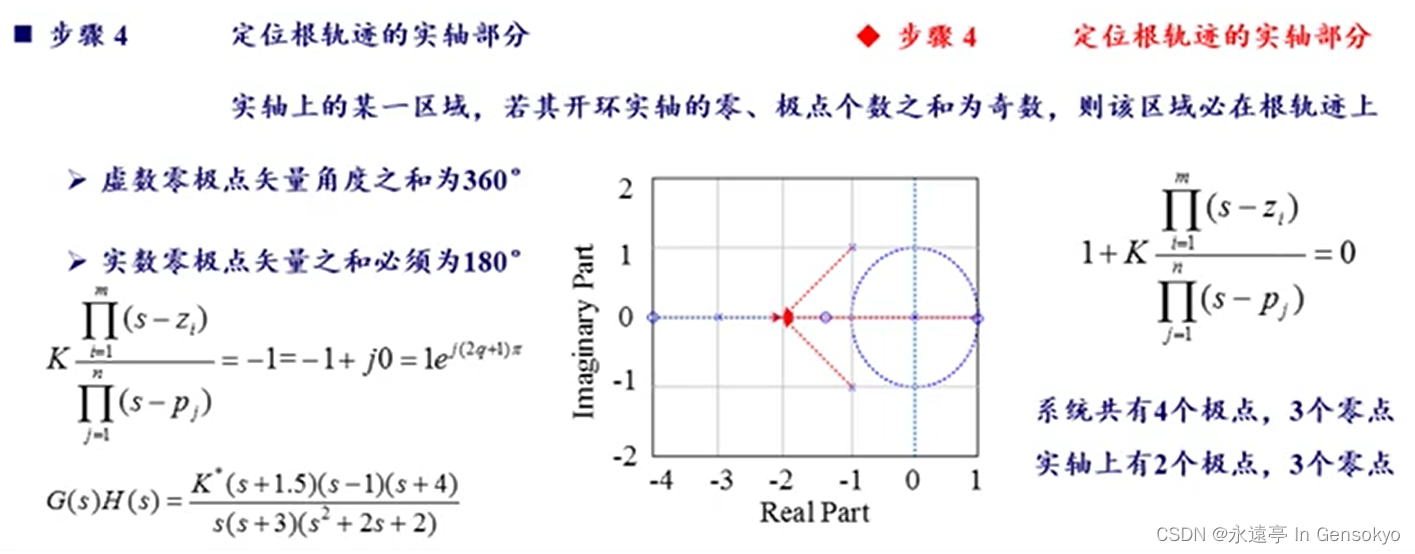
这个步骤的意义就是确认根轨迹的实轴部分。比如下面那个开环传函,在实轴上的零极点有5个(-4,-1.5,1,-3,0),则实轴[-4,1]区域就一定在根轨迹上。
不过这一步也不是说如果是偶数就一定不在。
5.根轨迹一定与水平实轴对称

这一步其实不叫步骤,只要记住有这么个结论就行。
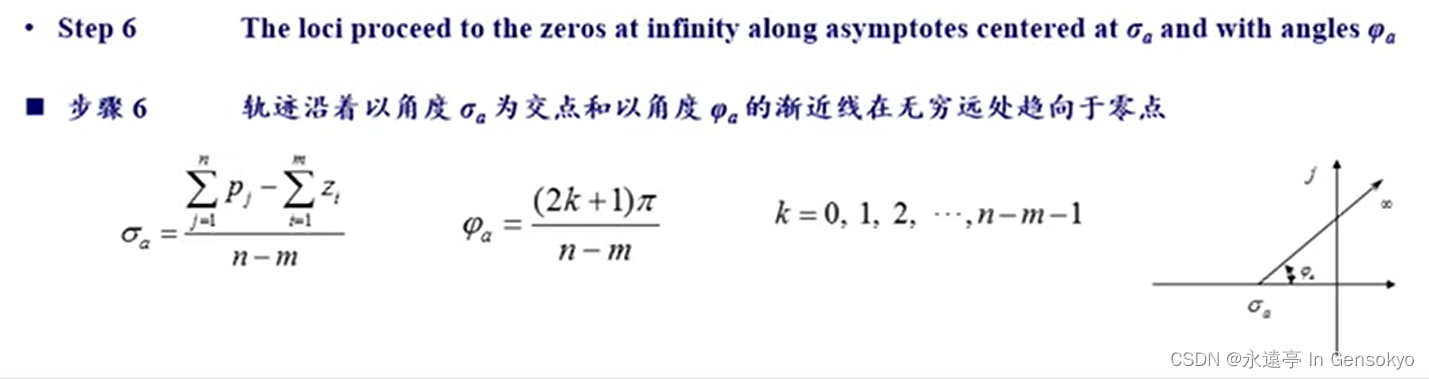
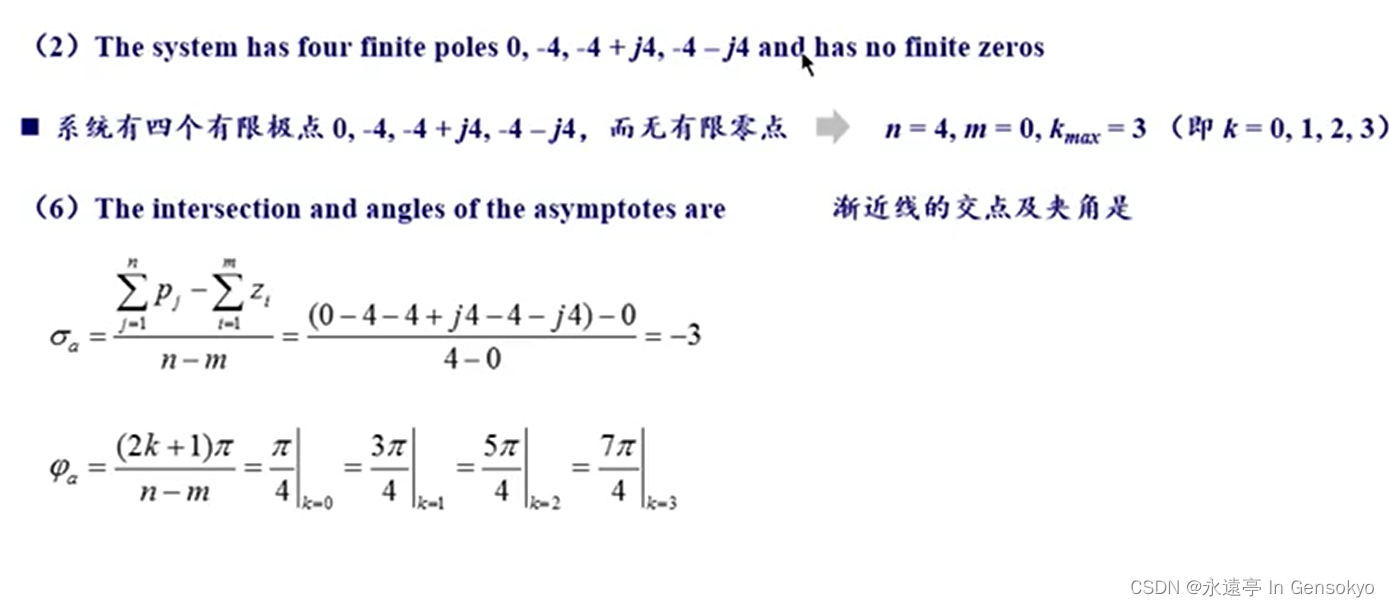
6.确定根轨迹渐近线的交点与夹角
这么看可能不是很透彻,那就看这个:
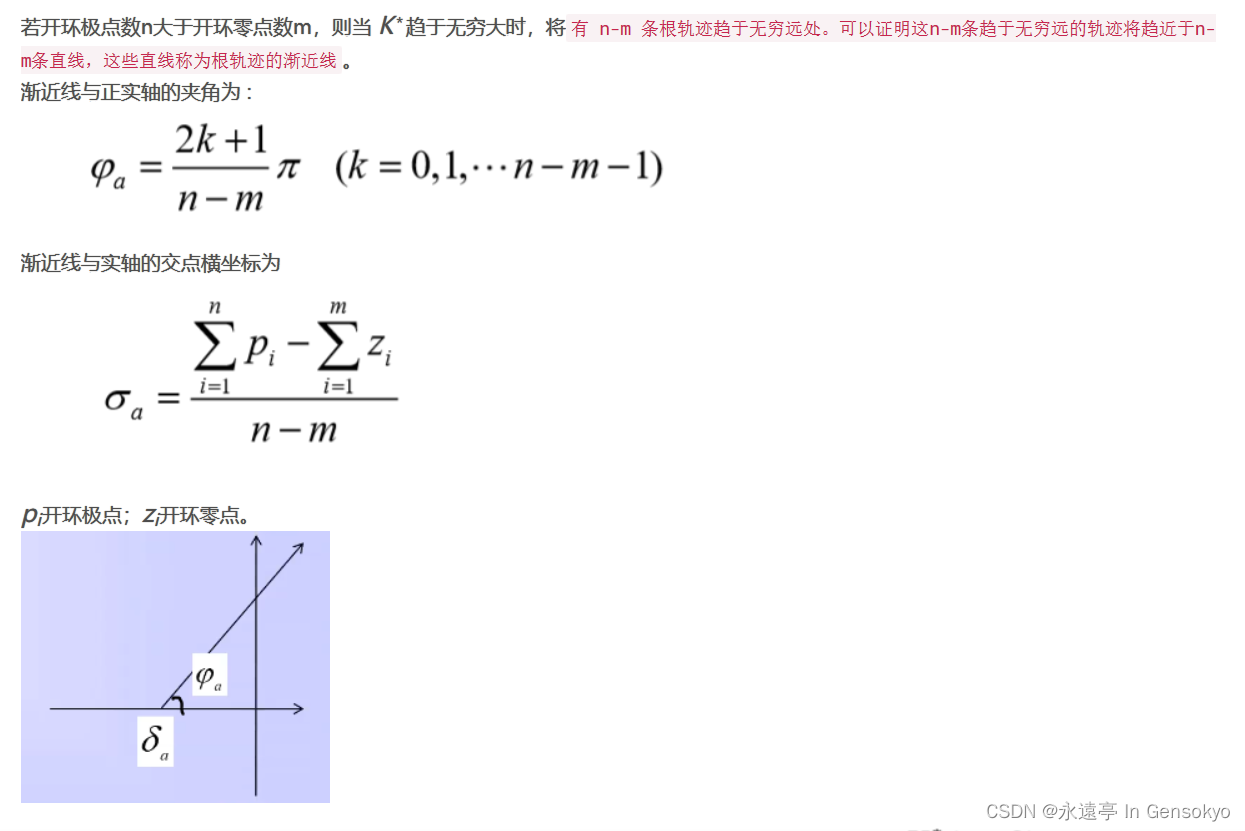 这一步就是确定根轨迹的渐进线,包含渐进线的实轴坐标与和正实轴的夹角,注意,夹角值可能是不止一个的,因为k可能不止一个。
这一步就是确定根轨迹的渐进线,包含渐进线的实轴坐标与和正实轴的夹角,注意,夹角值可能是不止一个的,因为k可能不止一个。
并且,这一步是针对n>m时、有n-m条根轨迹趋于无穷大的情况而言的,他们就是沿着这些渐进线趋于无穷大,如果n=m那么这坐标跟夹角都是没法算的。
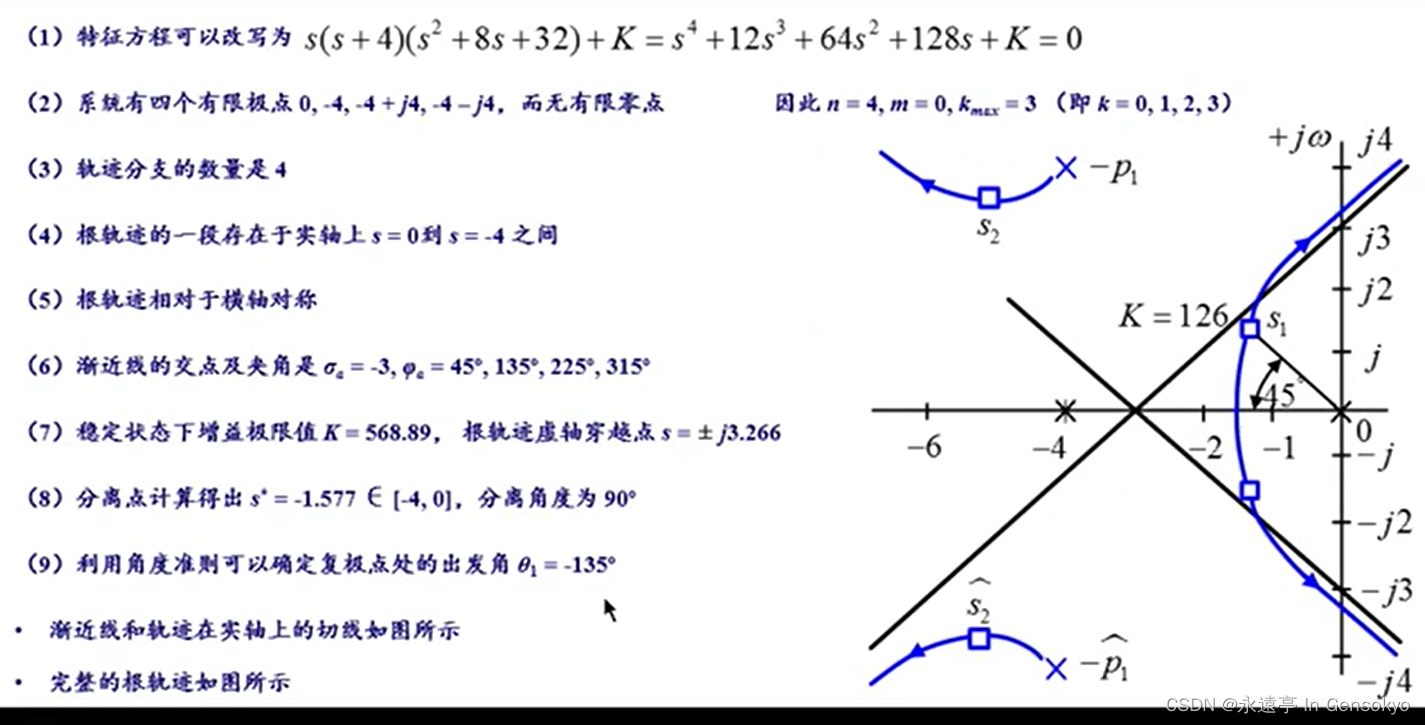
示例:其实这道题只用到这一步就能把根轨迹大致画出来了。

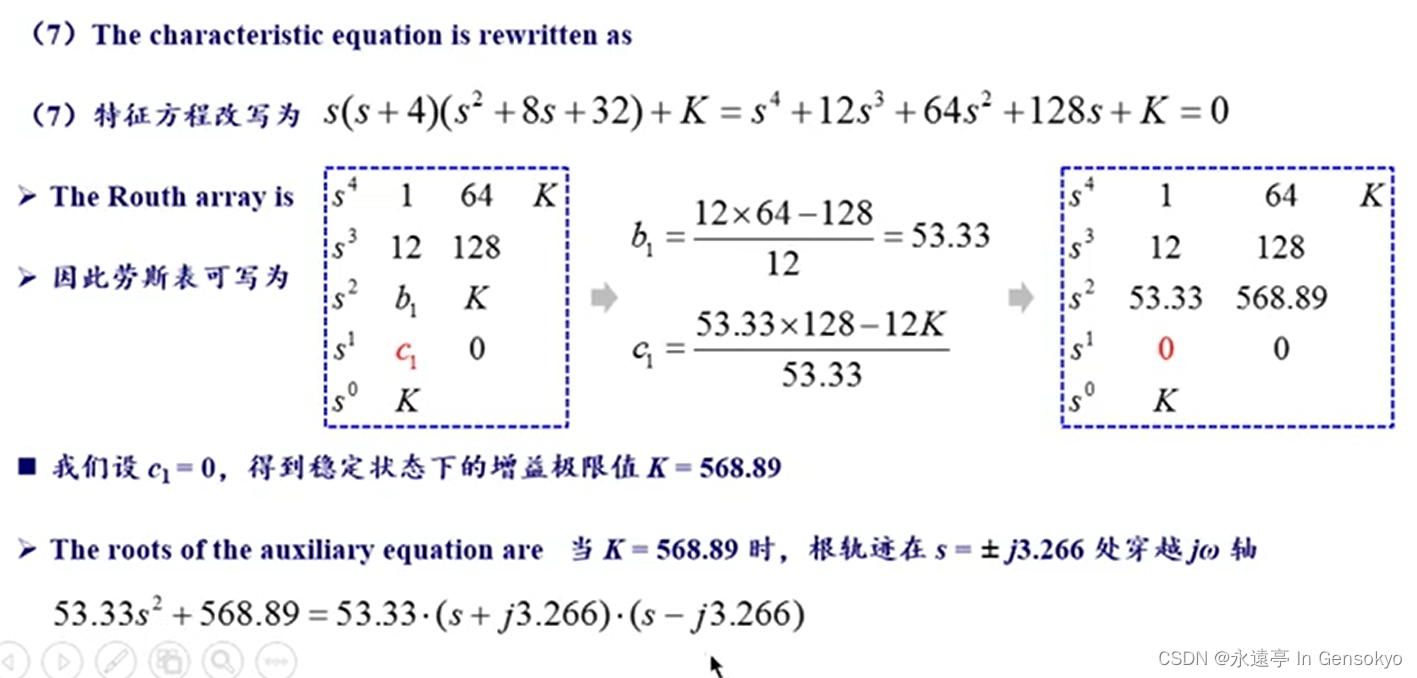
7.确定根轨迹与虚轴的交点(若有)
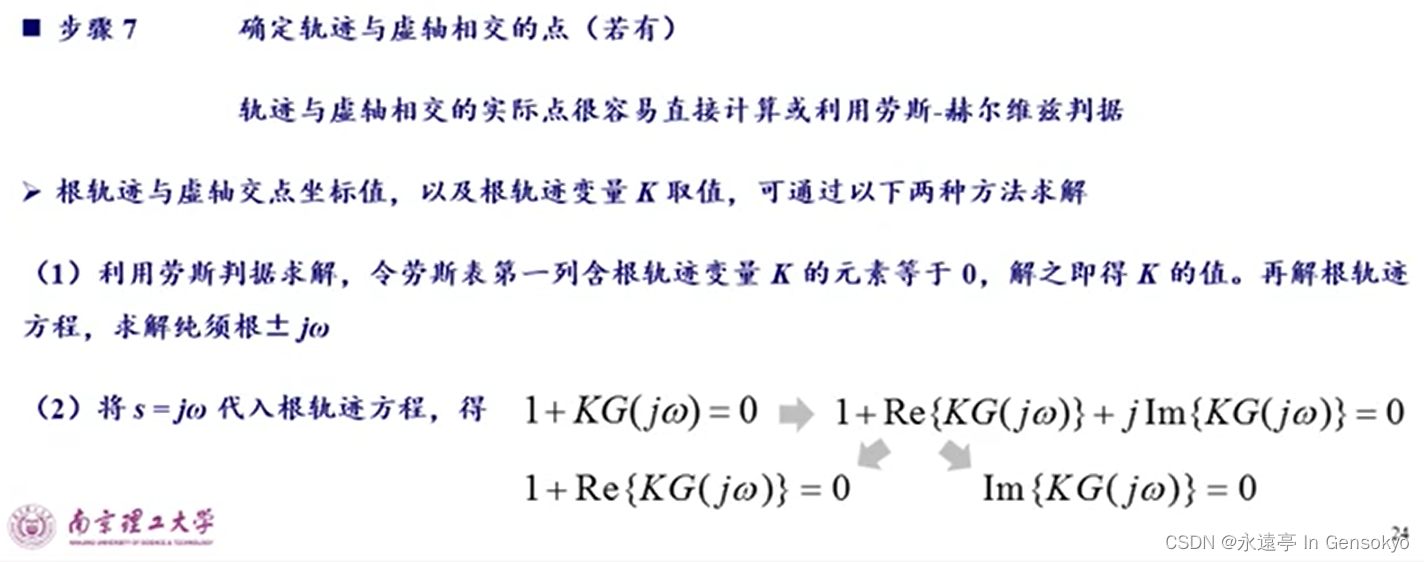 第6步中我们已经大致画出了根轨迹的形状,但有一些参数仍不知道,比如那两条轨迹与虚轴的交点,这一步就是求根轨迹与虚轴的交点。
第6步中我们已经大致画出了根轨迹的形状,但有一些参数仍不知道,比如那两条轨迹与虚轴的交点,这一步就是求根轨迹与虚轴的交点。
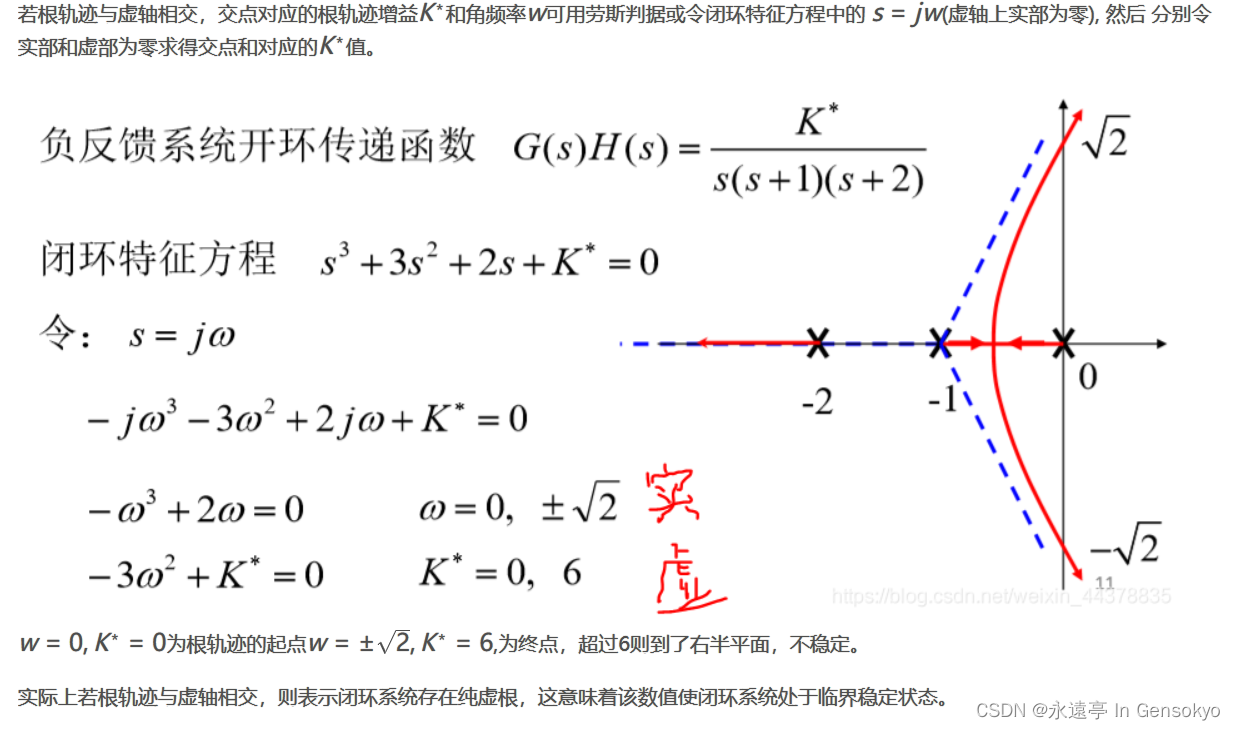
至于用哪种方法看个人。顺便提一句,这样解出来的值是K和w的值,w即复平面的纵坐标,k即交点处k对应的值,因为不要忘记一点,根轨迹实际上是极点关于K的函数曲线,即当k为这个值时,系统有极点在虚轴上,即系统临界稳定。
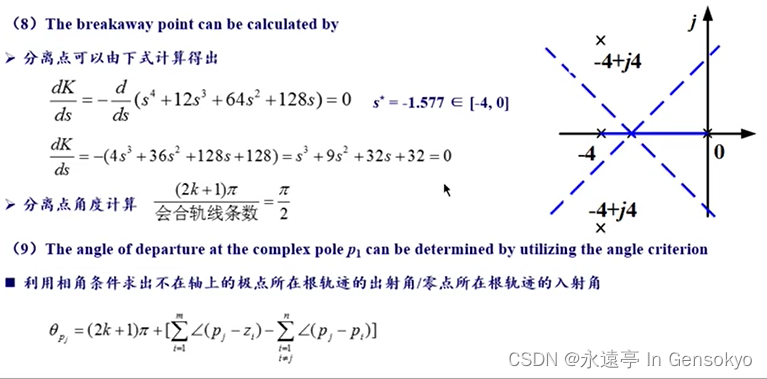
8.确定分离点与汇合点
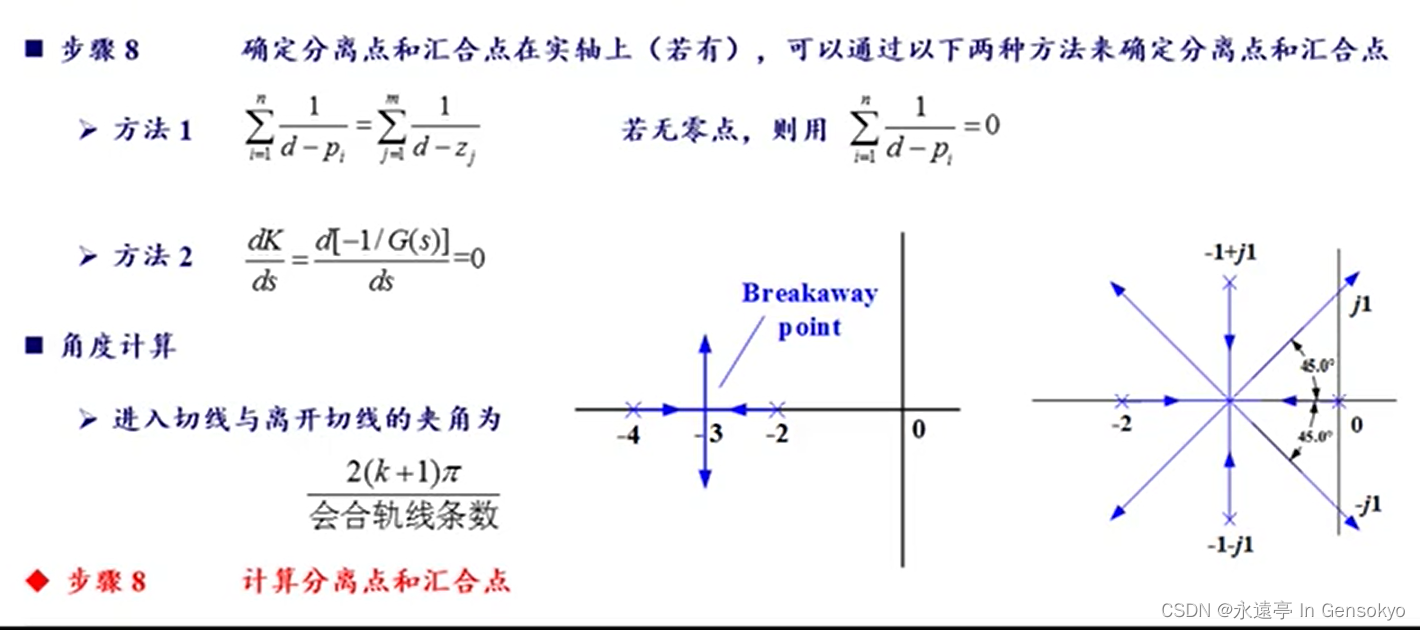
这样解出来的点不能直接知道谁是分离点谁是汇合点,只能知道他一定是分离或者汇合点。
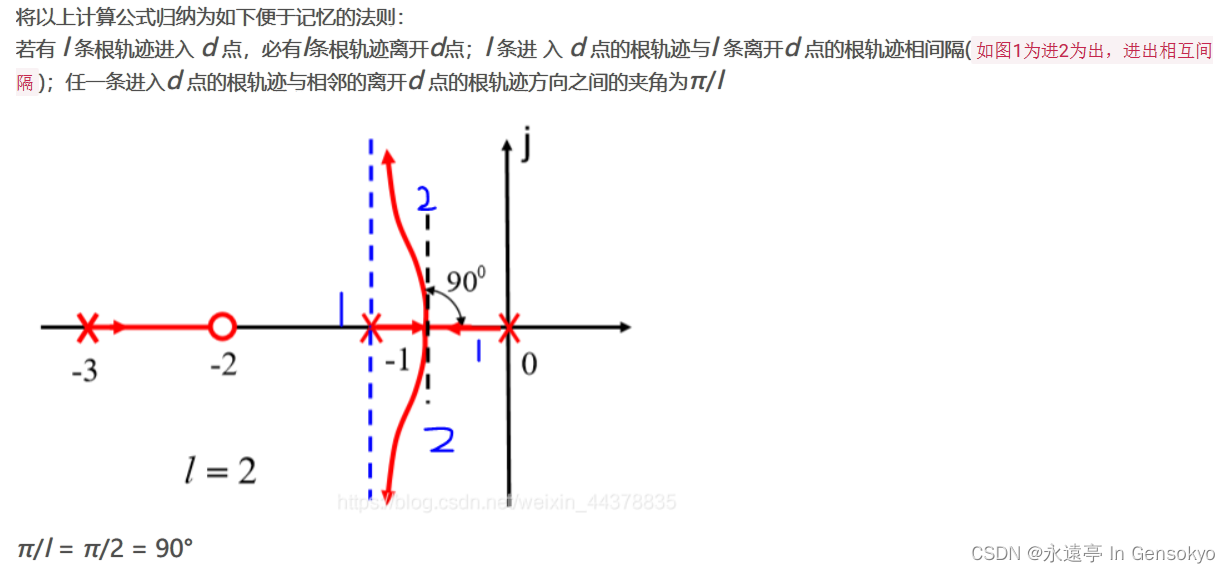
下面的角度,实际上就是分离角和汇合角,定义为:根轨迹进入/离开点处的切线与实轴正反向夹角,这个参数的意义是看根轨迹从哪个方向进入/离开分离点和汇合点的。
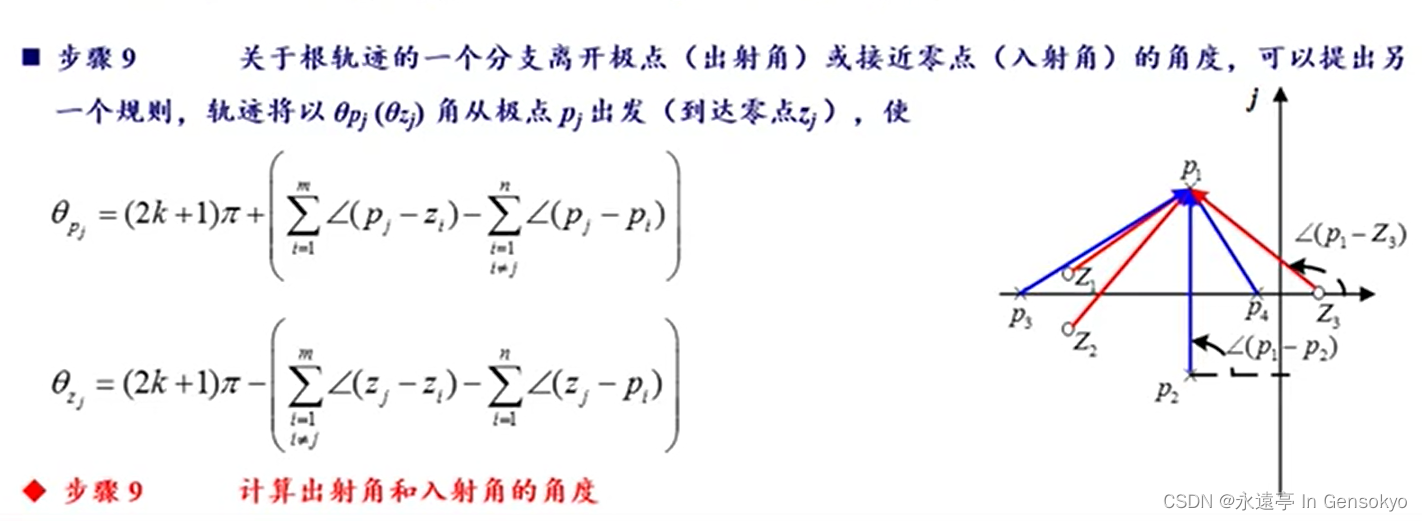
9.确定出射角与入射角
出射角与入射角分别就是离开开环极点和进入开环零点处切线与正实轴的夹角。


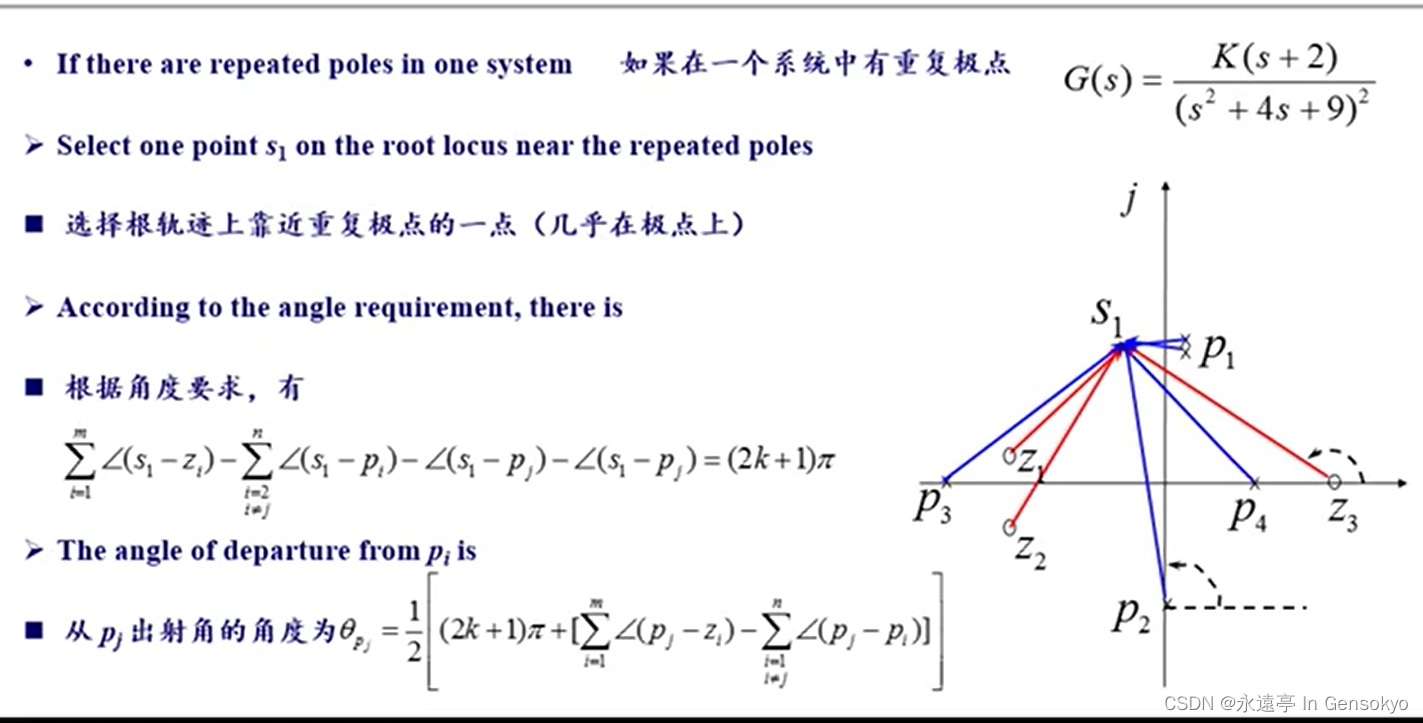
还有这种情况:
以及一个定理: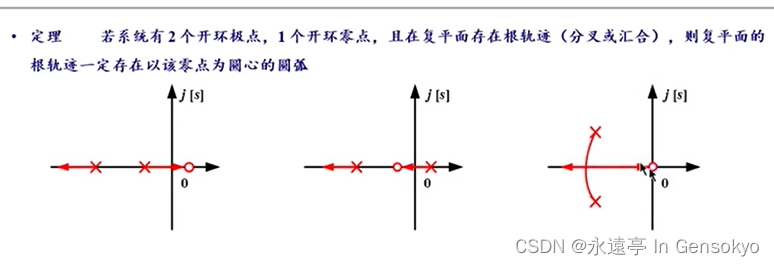
三、例子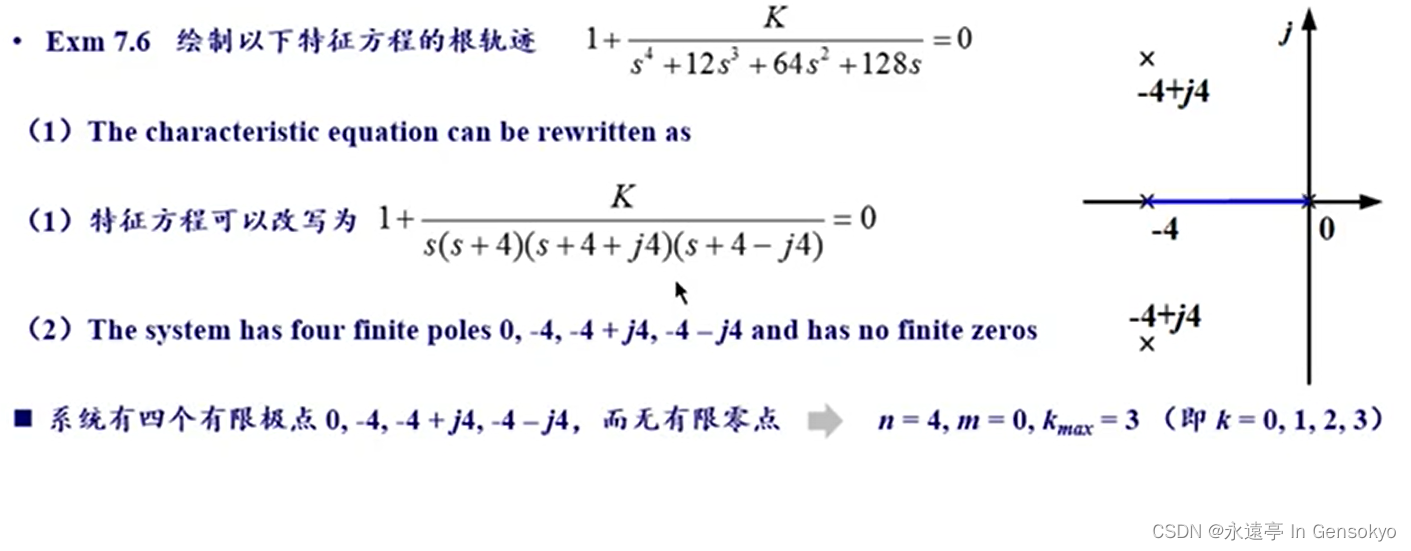

















 2701
2701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









