







gampping算法和rtab-map slam算法对比
很开心最近有机会对比slam算法。
- gmapping
gmapping算法是通过粒子滤波的方法实现,这种方法一般需要大量的粒子来获取好的结果,但这必会引入计算的复杂度;粒子是一个依据过程的观测逐渐更新权重与收敛的过程,这种重采样的过程必然会代入粒子耗散问题(depletion problem), 大权重粒子显著,小权重粒子会消失(有可能正确的粒子模拟可能在中间的阶段表现权重小而消失).
自适应重采样技术引入减少了粒子耗散问题 , 计算粒子分布的时候不单单仅依靠机器人的运动(里程计),同时将当前观测考虑进去, 减少了机器人位置在粒子滤波步骤中的不确定性. (FAST-SLAM 2.0 的思想,可以适当减少粒子数)
2. rtab-slam
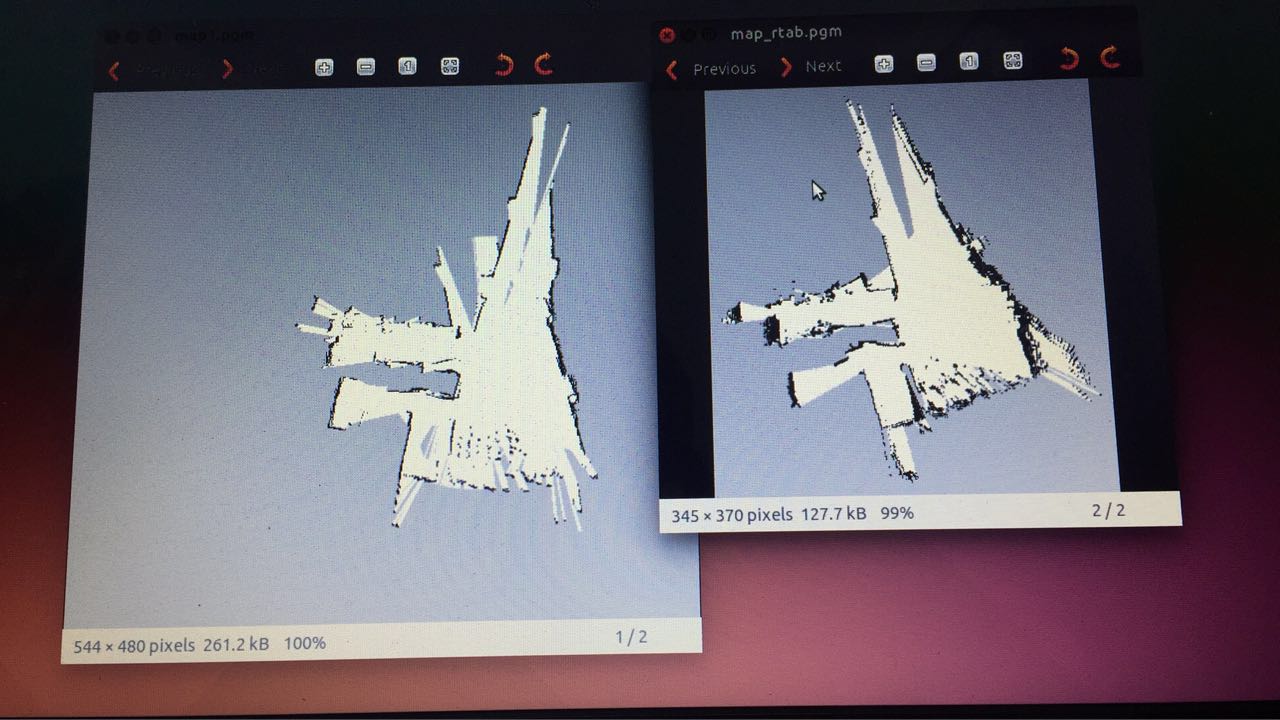
rtab-slam算法主要通过通过sift关键点进行匹配,然后估计相机运动,最后通过闭环检测减少误差。实验平台如下,对比结果如下,可以看出使用rtab-map slam算法对减少了地图匹配误差,并且边界明显。左边是gmapping,右边是rtab-map slam。
















 668
668

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









