






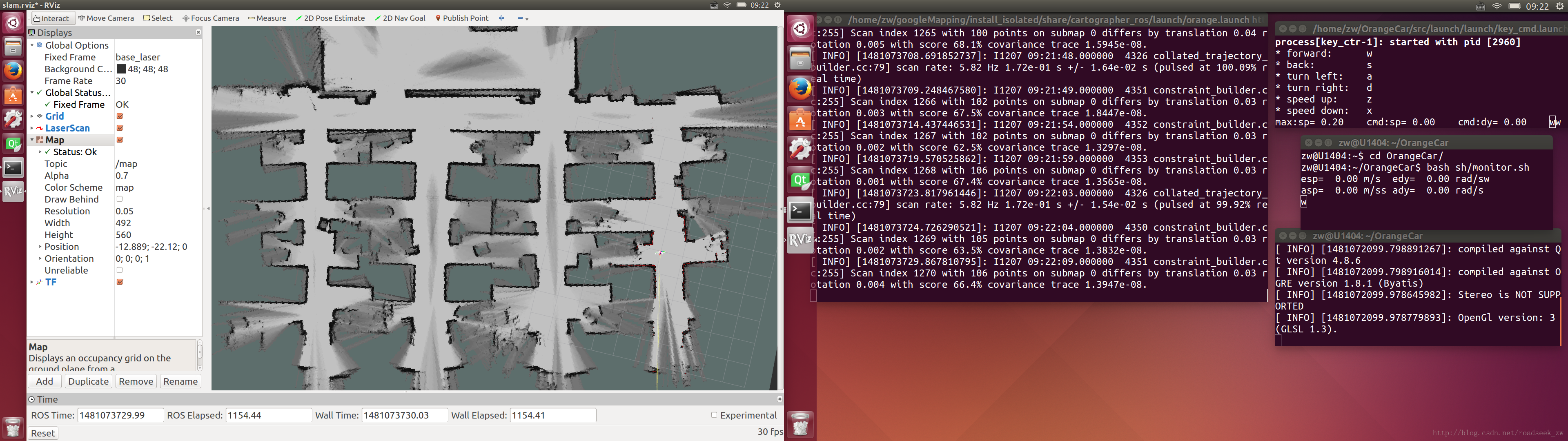
cartographer只用激光(5Hz,360°),计算量略大,效果相当惊艳,在笔记本上(i7)跑的slam , 5cm分辨率
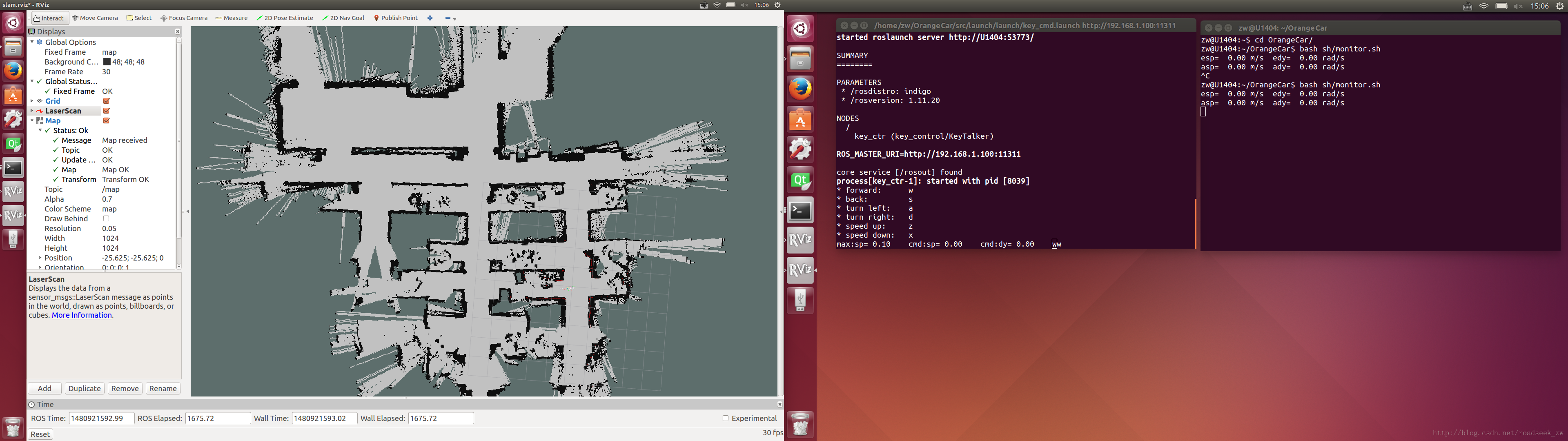
hector 只用激光,工控机(奔腾双核四线程)跑slam ,5cm分辨率
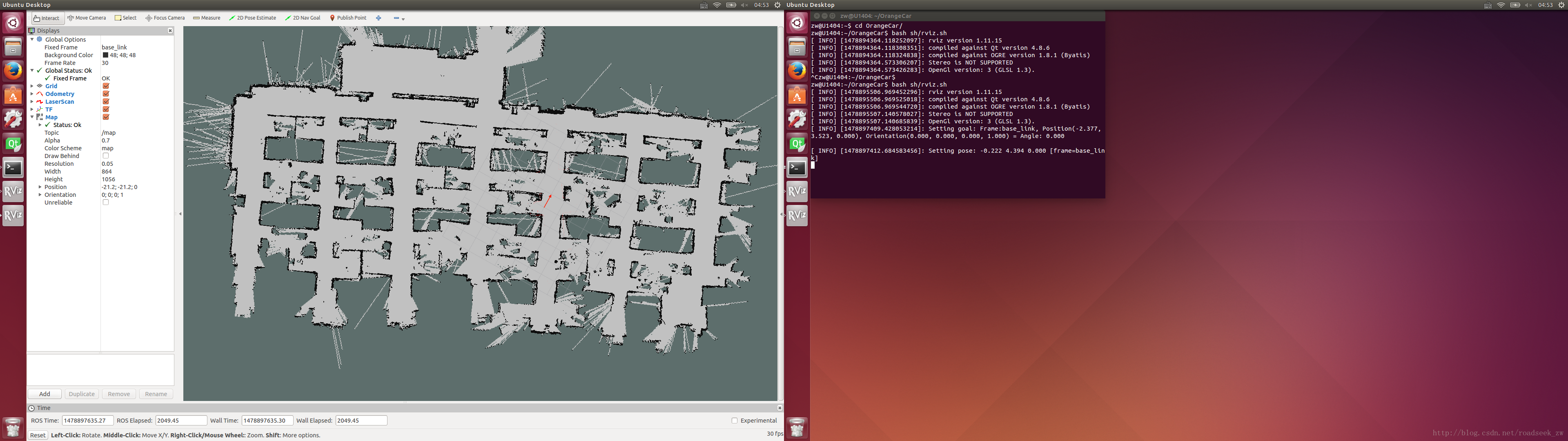
gmapping 激光+里程计, 工控机跑slam , 5cm分辨率
可以看出google的算法真是牛逼,地图中的环,完美的检测到了。
下一步就是加入里程计和imu,分析源码了。紧跟时代潮流。

cartographer只用激光(5Hz,360°),计算量略大,效果相当惊艳,在笔记本上(i7)跑的slam , 5cm分辨率
hector 只用激光,工控机(奔腾双核四线程)跑slam ,5cm分辨率
gmapping 激光+里程计, 工控机跑slam , 5cm分辨率
可以看出google的算法真是牛逼,地图中的环,完美的检测到了。
下一步就是加入里程计和imu,分析源码了。紧跟时代潮流。
 1300
709
1300
709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























