







个人简介
作者简介:全栈研发,具备端到端系统落地能力,专注大模型的压缩部署、多模态理解与 Agent 架构设计。 热爱“结构”与“秩序”,相信复杂系统背后总有简洁可控的可能。
我叫观熵。不是在控熵,就是在观测熵的流动
个人主页:观熵
个人邮箱:privatexxxx@163.com
座右铭:愿科技之光,不止照亮智能,也照亮人心!

专栏导航
观熵系列专栏导航:
AI前沿探索:从大模型进化、多模态交互、AIGC内容生成,到AI在行业中的落地应用,我们将深入剖析最前沿的AI技术,分享实用的开发经验,并探讨AI未来的发展趋势
AI开源框架实战:面向 AI 工程师的大模型框架实战指南,覆盖训练、推理、部署与评估的全链路最佳实践
计算机视觉:聚焦计算机视觉前沿技术,涵盖图像识别、目标检测、自动驾驶、医疗影像等领域的最新进展和应用案例
国产大模型部署实战:持续更新的国产开源大模型部署实战教程,覆盖从 模型选型 → 环境配置 → 本地推理 → API封装 → 高性能部署 → 多模型管理 的完整全流程
TensorFlow 全栈实战:从建模到部署:覆盖模型构建、训练优化、跨平台部署与工程交付,帮助开发者掌握从原型到上线的完整 AI 开发流程
PyTorch 全栈实战专栏: PyTorch 框架的全栈实战应用,涵盖从模型训练、优化、部署到维护的完整流程
深入理解 TensorRT:深入解析 TensorRT 的核心机制与部署实践,助力构建高性能 AI 推理系统
Megatron-LM 实战笔记:聚焦于 Megatron-LM 框架的实战应用,涵盖从预训练、微调到部署的全流程
AI Agent:系统学习并亲手构建一个完整的 AI Agent 系统,从基础理论、算法实战、框架应用,到私有部署、多端集成
DeepSeek 实战与解析:聚焦 DeepSeek 系列模型原理解析与实战应用,涵盖部署、推理、微调与多场景集成,助你高效上手国产大模型
端侧大模型:聚焦大模型在移动设备上的部署与优化,探索端侧智能的实现路径
行业大模型 · 数据全流程指南:大模型预训练数据的设计、采集、清洗与合规治理,聚焦行业场景,从需求定义到数据闭环,帮助您构建专属的智能数据基座
机器人研发全栈进阶指南:从ROS到AI智能控制:机器人系统架构、感知建图、路径规划、控制系统、AI智能决策、系统集成等核心能力模块
人工智能下的网络安全:通过实战案例和系统化方法,帮助开发者和安全工程师识别风险、构建防御机制,确保 AI 系统的稳定与安全
智能 DevOps 工厂:AI 驱动的持续交付实践:构建以 AI 为核心的智能 DevOps 平台,涵盖从 CI/CD 流水线、AIOps、MLOps 到 DevSecOps 的全流程实践。
C++学习笔记?:聚焦于现代 C++ 编程的核心概念与实践,涵盖 STL 源码剖析、内存管理、模板元编程等关键技术
AI × Quant 系统化落地实战:从数据、策略到实盘,打造全栈智能量化交易系统
大模型运营专家的Prompt修炼之路:本专栏聚焦开发 / 测试人员的实际转型路径,基于 OpenAI、DeepSeek、抖音等真实资料,拆解 从入门到专业落地的关键主题,涵盖 Prompt 编写范式、结构输出控制、模型行为评估、系统接入与 DevOps 管理。每一篇都不讲概念空话,只做实战经验沉淀,让你一步步成为真正的模型运营专家。
什么是具身智能?从大脑走向身体的AI演化之路
🧭 摘要:
具身智能(Embodied AI)正在成为人工智能领域的下一个爆点。从 Boston Dynamics 的仿生机器人到 OpenAI 训练的机械臂,从 Meta 的 AI Habitat 到 Tesla 全自动驾驶背后的控制系统,具身智能正重新定义“智能”的含义——不再局限于算法与模型,而是通过感知、交互和运动,真正落地到现实物理世界。
本篇将以一个工程师的视角系统解析:具身智能是什么?它为何是通向通用人工智能(AGI)的关键一步?与传统AI相比,它的底层范式发生了哪些变化?我们将带你从理论起源走向实际场景,拆解具身智能背后的感知-决策-执行三要素框架,并结合当下大模型时代的演进趋势,揭示其未来的技术潜力与发展路线图。
目录
- 第一章:引言——为什么具身智能正变得重要?
- 第二章:什么是具身智能?
- 第三章:感知 × 决策 × 执行:具身智能的三要素系统
- 第四章:具身智能 ≠ 机器人 —— 从机械控制到认知进化的范式飞跃
- 第五章:Sim ≠ Real?具身智能如何跨越仿真与现实的鸿沟
- 第六章:具身智能的现实应用场景
- 第七章:具身智能的未来趋势与关键突破口
- 第八章:具身智能时代,我们该如何参与?
第一章:引言——为什么具身智能正变得重要?
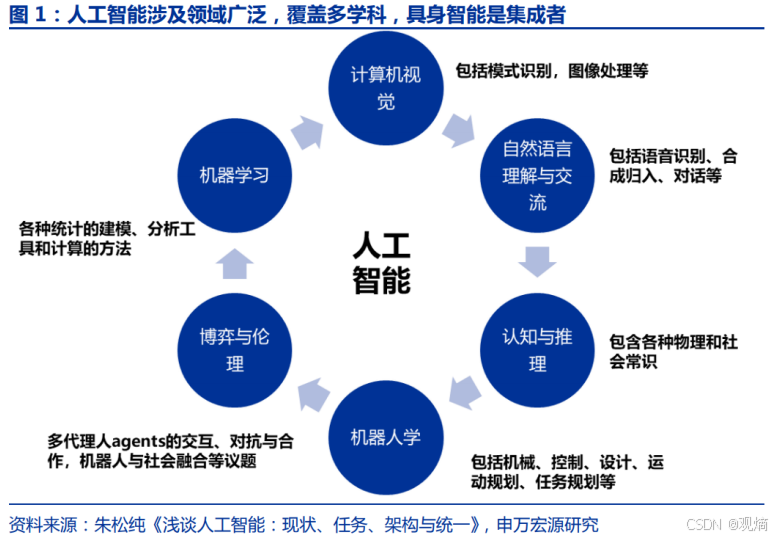
近年来,人工智能(AI)在自然语言处理和计算机视觉等领域取得了显著进展。然而,这些系统主要在虚拟环境中运行,缺乏与物理世界的直接交互能力。具身智能(Embodied AI)正是在这一背景下应运而生,它强调智能体通过与环境的感知和交互来实现更深层次的理解和学习。
从虚拟到现实:AI 的新挑战
传统的 AI 系统通常在静态的数据集上进行训练,缺乏与环境的实时交互能力。具身智能则要求系统能够在动态环境中进行感知、决策和执行,具备更强的适应性和灵活性。
现实世界中的应用案例
具身智能的应用已经在多个领域展现出潜力。例如,Boston Dynamics 的 Atlas 机器人展示了人形机器人在复杂环境中的运动能力。Google DeepMind 的 Gemini Robotics 项目则致力于将多模态 AI 模型应用于机器人控制,使其能够理解和执行复杂的物理任务。
第二章:什么是具身智能?
具身智能是指 AI 系统通过与环境的感知和交互来实现学习和适应的能力。它不仅关注数据处理和模式识别,更强调在物理世界中的实际操作和反馈。
理论基础
具身智能的理论基础包括感知-动作循环、强化学习和模仿学习等。这些理论强调智能体在与环境的互动中不断调整和优化其行为策略。
与传统 AI 的区别
传统的 AI 系统通常在静态的数据集上进行训练,缺乏与环境的实时交互能力。而具身智能则要求系统能够在动态环境中进行感知、决策和执行,具备更强的适应性和灵活性。
具身智能的核心要素
- 感知系统:包括视觉、听觉、触觉等,用于获取环境信息。
- 决策机制:基于感知信息,制定行动策略。
- 执行机构:如机械臂、移动平台等,用于执行具体动作。
第三章:感知 × 决策 × 执行:具身智能的三要素系统
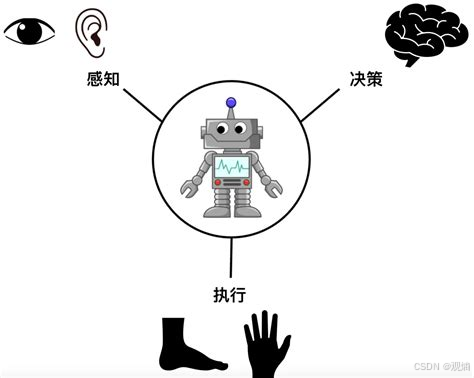
具身智能并不是将已有的 AI 模型“装进”机器人那么简单,它更像是在构建一个可持续运作的“认知系统”。这一系统需要完成三件核心任务:感知环境、制定决策、执行动作。这三者相互协同、闭环反馈,构成具身智能的基础框架。
感知系统:智能体的“眼耳鼻舌身”
在具身智能中,感知系统是智能体接收外部世界信息的主要通道。它并非单一视觉模块,而是多模态输入的组合,包括:
- 视觉感知:通过 RGB 相机、深度摄像头、激光雷达等采集视觉数据,用于识别物体、估算位置、判断路径等任务。
- 听觉感知:对于服务型机器人,理解用户语音指令和环境声学背景至关重要。
- 触觉反馈:在机械手臂执行抓取、搬运等任务时,触觉传感器可提供压力、材质等反馈信息。
- 位姿/运动感知:IMU、GPS、编码器等传感器用于实时追踪机器人的位置与姿态变化。
感知系统的关键,不仅在于采集信息本身,更重要的是如何以任务驱动方式高效利用这些信息,这就需要决策系统的介入。
决策系统:从感知到动作的核心桥梁
在机器人获取环境信息后,必须基于任务目标和环境状态做出判断——这正是决策模块的任务。
当前主流的决策方法分为以下几类:
- 模仿学习(Imitation Learning):让机器人模仿人类操作行为,如使用视频/动作轨迹学习“怎么做”,适用于低复杂度、高实时性的任务。
- 强化学习(Reinforcement Learning):智能体在环境中通过试错获得最大化奖励策略,代表性如 PPO、SAC 等方法,适合高度不确定、可迭代优化的场景。
- 混合式策略:将强化学习与模仿学习结合,提高泛化能力与学习效率。
- 大模型驱动决策:以多模态大模型为中枢(如 OpenAI GPT-4、DeepSeek-VL),将感知输入转化为结构化意图或决策命令,代表新兴方向。
本质上,具身智能的决策系统要解决两个问题:“我应该做什么” 和 “现在做安全吗?”。这要求系统具备一定的世界建模能力和自适应反馈机制。
执行系统:让决策真正“动起来”
做出决策只是完成了一半,能否把抽象决策转化为实际动作,是衡量具身智能是否“能干活”的关键。
常见的执行机构包括:
- 机械臂与夹爪:完成抓取、组装、搬运等精细动作,需配合动作规划算法如逆运动学(IK)、轨迹优化器等。
- 轮式底盘与腿式结构:实现平移、爬坡、动态调整等运动任务,广泛用于仓储机器人、人形机器人等。
- 复合体系统:集成多个执行模块,在感知、控制、动态平衡等方面协同工作,如 Boston Dynamics 的 Spot、Tesla Optimus。
值得注意的是,执行系统的挑战远不止硬件层面,更涉及复杂的实时控制系统、动作生成网络、稳定性约束与安全反馈机制,这对软件和系统设计都提出了极高要求。
三者闭环:具身智能的“认知循环”
感知、决策与执行并非孤立模块,而是一个连续闭环系统:
- 感知系统获取环境状态;
- 决策模块分析目标、生成策略;
- 执行系统根据策略完成动作;
- 动作影响环境,感知系统再次反馈。
这个闭环的运行效率、准确性与稳定性,决定了具身智能系统在现实世界中的可用性。一个简单的延迟、一条错误的反馈路径,都可能导致系统失败。
第四章:具身智能 ≠ 机器人 —— 从机械控制到认知进化的范式飞跃
尽管“具身智能”听起来像是“给AI装个身体”,但它远不止如此。它不是“机器人学的AI版”,也不仅仅是“大模型+机械臂”,而是一次认知范式的跃迁:从基于规则的机械反应,迈向具备主动感知、自我建模、目标驱动的智能体架构。
具身智能不是“一个机器人有了AI”,而是“AI真正变成了生物一样的存在”。
1. 机器人≠具身智能:两个系统范式的根本区别
传统机器人系统强调控制精度、轨迹规划和机械执行,目标是让机器人完成预设任务,尽可能少出错。其核心是:
- 明确的任务模型(规则或脚本)
- 尽量结构化的环境
- 外部控制与集中调度
但具身智能的核心目标是适应未知、与世界对话。它不只是完成任务,而是“在任务中学习”、“通过试错优化策略”。
| 维度 | 传统机器人系统 | 具身智能系统 |
|---|---|---|
| 工作方式 | 执行预设动作 | 在环境中交互学习 |
| 适应能力 | 固定规则,环境稍变即崩 | 在变化中自适应、泛化 |
| 感知方式 | 简单传感器用于导航或避障 | 多模态感知融合,认知驱动 |
| 控制逻辑 | 外部控制(预设路径/状态机) | 内部策略(强化学习/模仿学习) |
| 智能体结构 | 硬件驱动,软件配合 | 软件先行,硬件适配智能行为 |
2. 具身智能是“认知系统”而非“执行机器”
如果说传统机器人是工业逻辑的延伸,那么具身智能更像是生物系统的复刻。
它关注的不是**“如何把命令执行得更精确”,而是“如何让系统自己决定要做什么”**。
- 具身智能强调“感知-决策-动作”的闭环,而非“接受指令-执行命令”的线性逻辑。
- 它要求系统能在感知世界的基础上构建内部表征(world model),进而支持抽象推理和策略制定。
- 它本质上是认知系统 + 行动系统的融合体,不是工业级控制机器,而是具备“世界模型”的智能体。
3. 模型架构的差异:从规则驱动到策略学习
具身智能不再依赖任务脚本或路径规划算法,而是采用自适应策略生成网络(Policy Net)+ 多模态世界建模网络(Perception → Latent Representation)来联动:
环境感知(图像/深度/语音/IMU)
→ 多模态感知模块
→ 世界模型(记忆 + 状态估计)
→ 策略网络(动作生成)
→ 执行动作 + 收集反馈
→ 更新状态与世界模型
这种结构本质上引入了“认知回路”,类似于人类的“看 → 想 → 行动 → 反馈 → 修正”的过程。
4. 为什么这是一次范式飞跃?
① 从控制逻辑到交互逻辑
控制逻辑:输入→输出,尽可能减少变量;
交互逻辑:与环境持续作用,不断更新策略。
② 从“完成任务”到“学习完成任务”
具身智能系统并不关心一次是否完成,而是**“在完成中学会如何完成”**,这就是元学习的雏形。
③ 从“工具”到“个体”
传统机器人是工具,具身智能是“体”。在一些高级架构中,它甚至可以构建自我认知(如 Meta 的 Ego4D 研究计划、Wayve 的 World Model AI)。
小结
具身智能不是机器人系统的升级版,而是人工智能“进入世界”的第一次认知飞跃。它构建的是一个能感知、理解、行动并持续优化的行为智能体,不是“机器人+模型”,而是“行动中的大脑”。
第五章:Sim ≠ Real?具身智能如何跨越仿真与现实的鸿沟
在具身智能(Embodied AI)领域,仿真环境为智能体的训练提供了高效、安全的场所。然而,将在仿真中学到的技能迁移到现实世界,即“Sim2Real”过程,仍面临诸多挑战。
1. Sim2Real 的核心挑战
1.1 物理建模差异
仿真环境中的物理引擎(如 MuJoCo、Bullet、PhysX)虽然强大,但仍难以完全还原现实世界中的摩擦、碰撞、柔性材料等复杂物理现象。这导致在仿真中表现良好的策略在现实中可能失效。
1.2 传感器与感知偏差
仿真中的传感器数据通常是理想化的,而现实中的传感器存在噪声、延迟和失真。例如,相机在不同光照条件下的表现、IMU 的漂移等,都会影响智能体的感知能力。
1.3 动态环境的不确定性
现实世界充满了不可预测的变化,如人类行为、物体移动等,而仿真环境往往是静态或可控的。这种差异使得智能体在现实中难以应对突发情况。
2. 缩小 Sim2Real 差距的策略
2.1 域随机化(Domain Randomization)
通过在仿真中引入各种随机性,如物体颜色、光照、纹理等,使智能体在多样化的环境中训练,从而提高其在现实中的泛化能力。
2.2 域自适应(Domain Adaptation)
利用生成对抗网络(GAN)等方法,将仿真数据转换为更接近现实的数据,或将现实数据映射到仿真域,以减少两者之间的差异。
2.3 系统识别与参数调整
通过收集现实世界的数据,调整仿真环境中的参数,使其更贴近现实。例如,测量实际机器人的动力学参数,并在仿真中进行相应设置。
3. 主流仿真平台与 Sim2Real 实践
3.1 AI Habitat
由 Facebook AI Research 开发,专注于视觉导航任务,提供高保真的室内环境仿真,支持多种传感器模拟,适用于训练和评估导航策略。
3.2 Isaac Sim
NVIDIA 提供的仿真平台,集成了强大的物理引擎和图形渲染能力,适用于复杂的机器人任务,如装配、操控等,支持与现实机器人系统的无缝对接。
3.3 RoboSuite
由斯坦福大学开发,基于 MuJoCo 引擎,提供多种机器人操控任务的仿真环境,适合研究强化学习和模仿学习在机器人控制中的应用。
4. 未来展望
尽管 Sim2Real 仍面临挑战,但随着仿真技术的不断进步和算法的优化,具身智能系统在现实世界中的应用将更加广泛。通过结合仿真与现实数据、优化训练策略,我们有望实现更高效、可靠的智能体部署。
第六章:具身智能的现实应用场景
具身智能(Embodied AI)正逐步从实验室走向现实世界,应用于多个领域,展现出强大的适应性和实用性。
1. 工业自动化与物流
在工业和物流领域,具身智能被用于提升自动化水平和操作效率。例如,Covariant 公司开发的 Covariant Brain 系统,结合模仿学习和强化学习,使机器人能够在仓库中进行物品分拣和处理,适应多变的物品种类和布局。
2. 医疗辅助与康复
具身智能在医疗领域的应用也日益广泛。例如,Mabu 是一款面向慢性病患者的对话型机器人,能够根据患者的反馈调整交互内容,提醒服药并监测健康状况,提升患者的依从性和生活质量。
3. 家庭服务与个人助理
在家庭服务领域,具身智能体被用于执行日常任务,如清洁、烹饪和陪伴。例如,Physical Intelligence 公司开发的 π0 模型,使机器人能够执行如折叠衣物、清洁桌面等复杂任务,展示了在家庭环境中的实用性。
4. 教育与社交机器人
具身智能还被应用于教育和社交领域。例如,Furhat 是一款具有人类面部表情的社交机器人,能够进行多语言对话和情感交流,用于教育、客户服务等场景,增强人机互动体验。
5. 自动驾驶与交通系统
在自动驾驶领域,具身智能体通过集成感知、决策和控制模块,实现对复杂交通环境的适应。例如,Wayve 公司开发的自动驾驶系统,结合深度学习和强化学习,使车辆能够在城市道路中自主导航和避障。
第七章:具身智能的未来趋势与关键突破口
具身智能的发展已经突破了传统机器人的边界,但它依然处在早期阶段,面临诸多挑战。真正的大规模落地和演化,需要从多个维度进行系统突破。本章将聚焦具身智能的未来发展趋势,分析其中的关键路径与潜在变革点。
1. 多模态融合:从“看见”到“理解”
当前的具身智能系统多依赖单一模态,如视觉主导的导航或机械控制。但人类智能并不孤立依赖视觉,而是多模态协同结果——视觉、听觉、触觉甚至语言。
未来趋势是:
- 视觉 + 语言指令融合(VLM):如 DeepMind 的 RT-2,结合视觉输入与自然语言目标,智能体能够“理解指令并执行”。
- 触觉 × 动作耦合:如 Meta 的 DIGIT 项目,将高分辨率触觉输入纳入学习体系,提升细粒度操作能力。
- 语音 × 社交 × 情感感知:服务型机器人将融合语音指令、情绪判断与动作生成,实现类人的交互体验。
多模态融合的目标是:构建具身智能体的“感官系统”,让它不仅“看到”,更能“感受”和“判断”。
2. 世界模型与长时记忆机制
一个具身智能体若要像人一样适应复杂环境,不能只是“短时反应”,还需要拥有对世界的长期建模与记忆能力。
目前的研究趋势包括:
- Egocentric World Modeling(自我中心世界模型):如 Meta 的 Ego4D 数据集和相关研究,支持智能体基于“第一人称经验”构建可更新的世界认知。
- Latent Space Navigation(潜空间导航):通过在潜变量空间构建结构化地图,实现跨场景泛化。
- Memory-Augmented Agents(增强记忆机制的智能体):结合 Transformer + 存储检索模块,实现智能体对过去任务、目标和环境状态的记忆调用。
这意味着未来的具身智能体将拥有“认知连续性”与“学习自迭代能力”。
3. 通用具身智能体(Generalist Agent)
当前大多数具身系统是任务定制型:一个模型学一个任务。但随着多任务强化学习、多模态模型发展,具身智能正向通用智能体方向迈进。
代表性方向:
- DeepMind RT 系列(RT-1/RT-2/RT-X):单一模型控制多个机器人、跨任务泛化能力强。
- Open X-Embodiment 架构:聚合多种机器人数据,训练统一策略模型,实现跨平台泛化。
- Tesla Optimus / Google Everyday Robot:试图构建“家庭助手通用体”,不依赖任务定制即可泛化。
这一趋势与大模型逻辑一致:从专家模型迈向通用智能平台,形成一个具身化的“AGI 雏形”。
4. 人类协同:从单智能体到协作系统
具身智能体的最终目标不是替代人类,而是与人类协同完成复杂任务,构建协作系统。这涉及到几个关键方向:
- 人机共情:如使用语音识别 + 面部表情 + 姿态判断构建人类意图感知模型;
- 指令解析与意图迁移:自然语言转行为计划的通用模型架构;
- 安全边界与权限学习机制:防止具身智能体越界、自发行为失控等情况。
这意味着未来具身系统将不再是“工具”,而是拥有角色边界、沟通接口和伦理机制的“行为个体”。
5. 芯片与算力的工程变革
具身智能对延迟、计算能力、功耗要求极高。传统 AI 加速器无法胜任其在“实时物理世界”中的部署需求。
未来将出现:
- 边缘部署优化型芯片(如 NVIDIA Jetson Orin 系列)
- 低功耗异构系统(LoRA + 量化推理 + 编译优化)
- 计算图与感知任务融合设计(如 Apple 推动的 Sensing-CoProc)
系统性协同优化(算法 × 芯片 × 执行流)将是具身智能工程化部署的基础。
小结:具身智能是走向 AGI 的“行动之路”
具身智能的演进路径并非单一维度的算法革新,而是感知、认知、记忆、推理、行动等多模块联动的系统工程。
未来的发展不只是“让机器人更聪明”,而是“让AI真正进入世界”,拥有像人类一样的身体、认知与互动能力。
第八章:具身智能时代,我们该如何参与?
具身智能已经不再只是实验室里的研究概念,而是逐步走进工业、服务、家庭等真实场景的技术体系。无论你是开发者、研究者,还是产品技术负责人,都可以从不同的起点参与进来。
你不需要一开始就做出复杂系统,只要跑通一个智能体任务、建立一个感知-决策-执行的简单闭环,就已经迈出了关键的第一步。
推荐资源
-
RoboSuite:斯坦福推出的机器人仿真平台,适合新手快速上手
GitHub 地址:github.com/ARISE-Initiative/robosuite -
AI Habitat:Meta 提供的视觉导航环境,适合具身导航实验
官网地址:aihabitat.org -
B站推荐关键词:RoboSuite 教程、Isaac Sim 中文教学、具身智能项目实录
🌟 如果本文对你有帮助,欢迎三连支持!
👍 点个赞,给我一些反馈动力
⭐ 收藏起来,方便之后复习查阅
🔔 关注我,后续还有更多实战内容持续更新
写系统,也写秩序;写代码,也写世界。
观熵出品,皆为实战沉淀。



















 643
643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











