







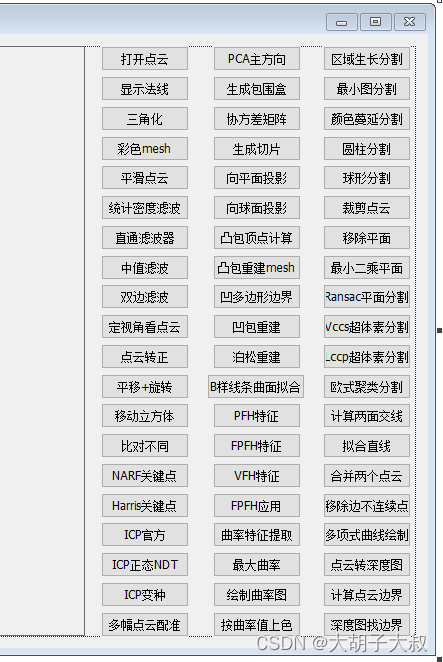
pcl经典算法60例大集合
------------------------------------------------------------
声明 | 未经允许,禁止转载!
作者 | 大胡子大叔
出品 | CSDN
-------------------------------------------------------------
------------------------------------------------------------
声明 | 未经允许,禁止转载!
作者 | 大胡子大叔
出品 | CSDN
-------------------------------------------------------------
 723
3112
743
723
3112
743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























