






 本文详细介绍了如何通过地面站对飞控进行固件烧录、选择机架、传感器和遥控器校准,以及飞行模式、电调校准和关键参数设置。包括使用不同版本固件的注意事项和解锁策略。
本文详细介绍了如何通过地面站对飞控进行固件烧录、选择机架、传感器和遥控器校准,以及飞行模式、电调校准和关键参数设置。包括使用不同版本固件的注意事项和解锁策略。
地面站调试
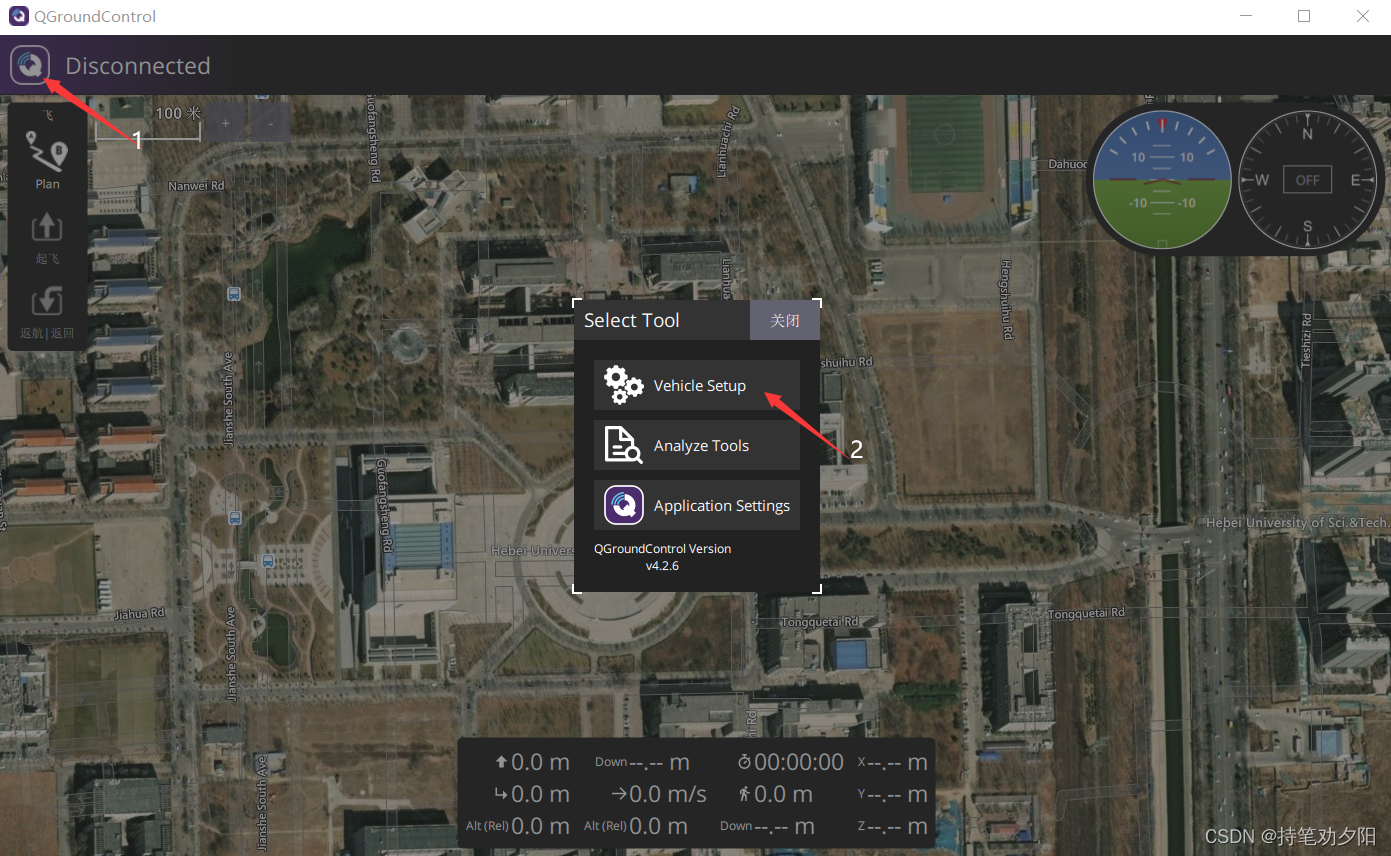
将飞控通过USB数据线或数传连接地面站,连接后点击1出现2这个界面,点击2进入调试界面
1.固件烧录
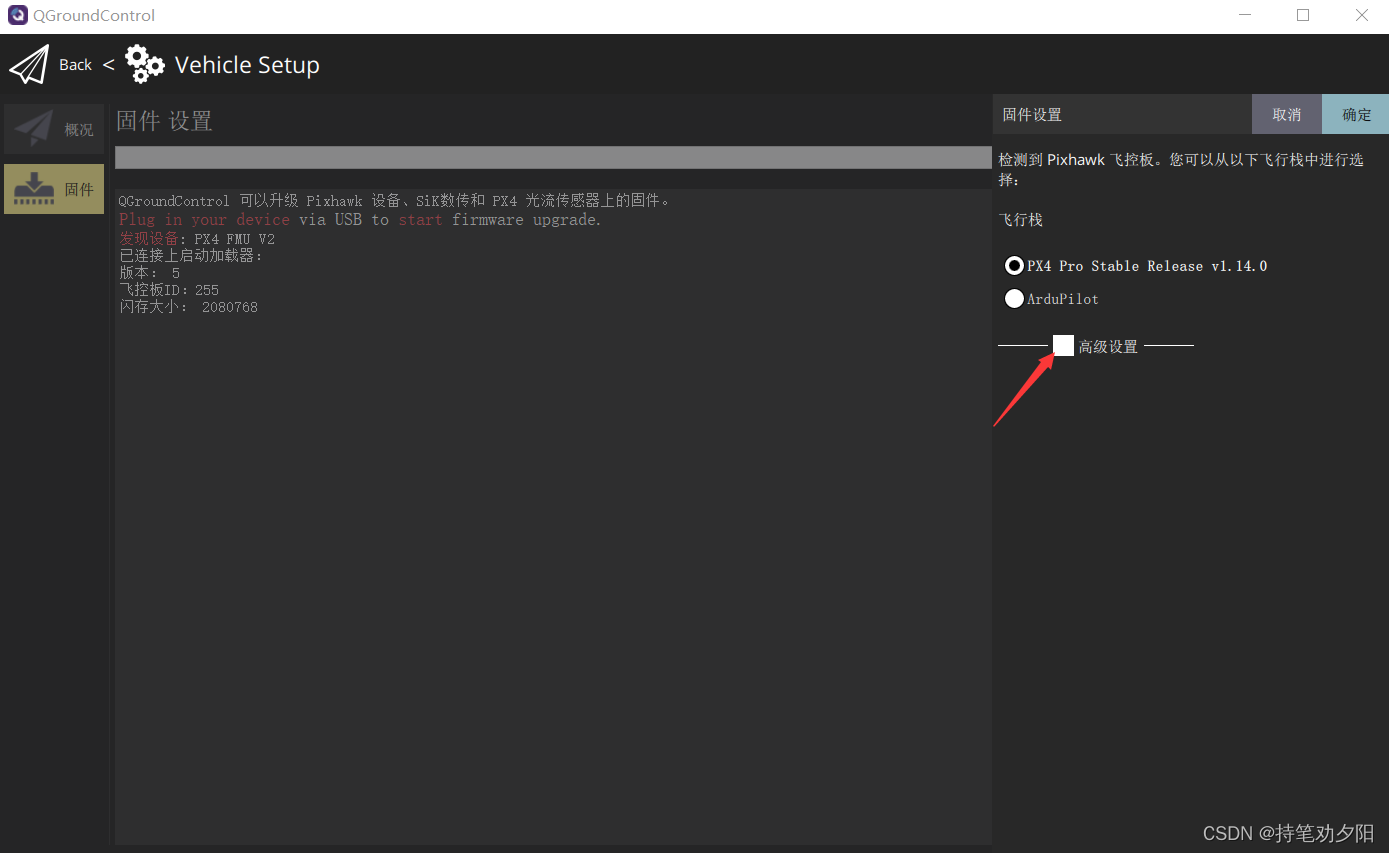
打开固件界面,飞控只能通过连接usb线连接地面站才能刷固件。烧录固件有两种选择,可以用地面站默认的固件(一般是最新版),最新版一般是测试版,不太稳定;另一种方式是点击高级设置烧录自己下载的固件 。(如果是烧自己的固件,pixhawk2.4.8可以选用px4_fmu-v2_default固件,也可以用v3,v3更稳定一些;雷迅v5刷px4_fmu-v5_default固件,雷迅x7pro刷cuav_x7pro_default固件)
固件可以通过下面的链接下载:
https://github.com/PX4/PX4-Autopilot/releases
2.选择机架
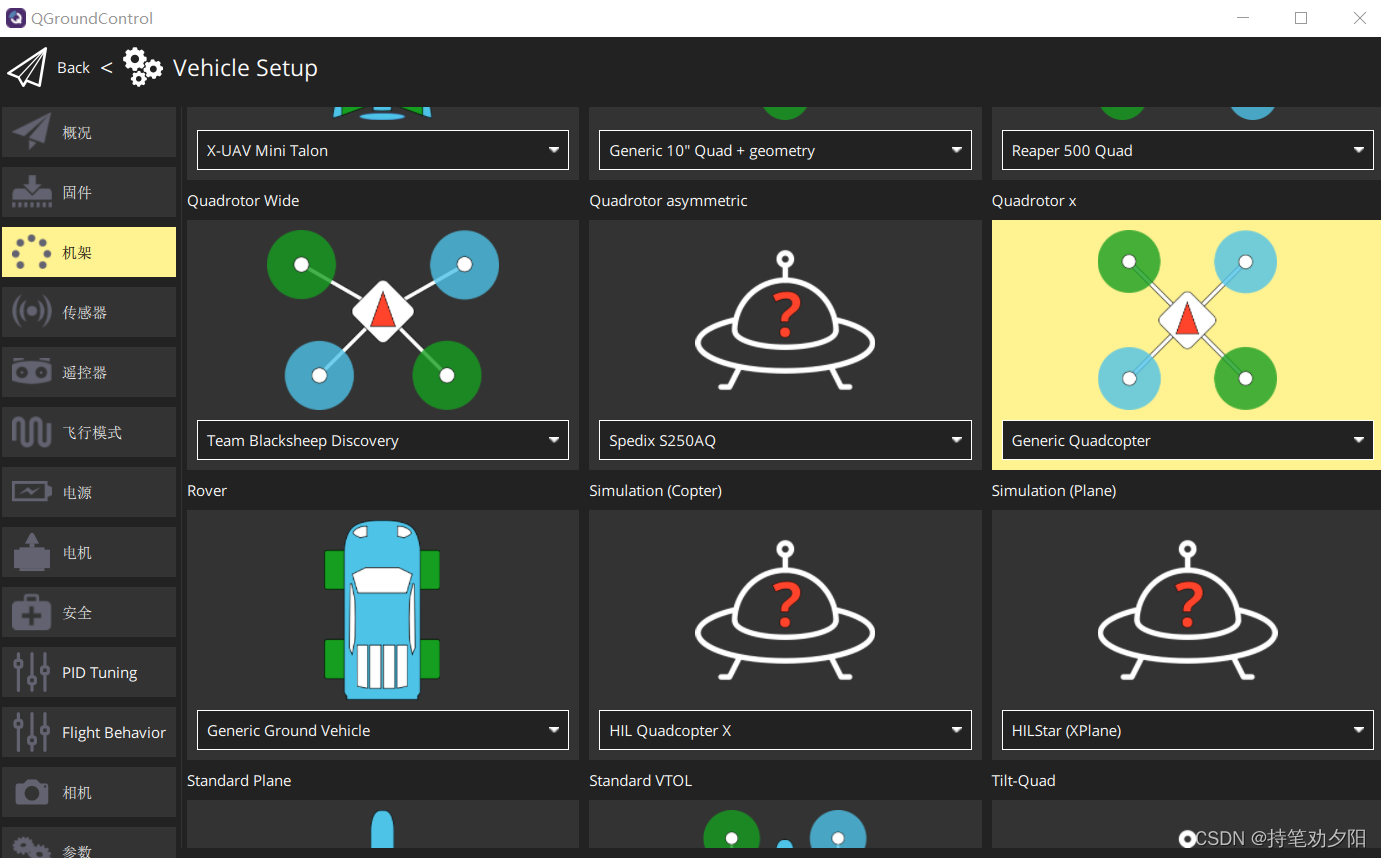
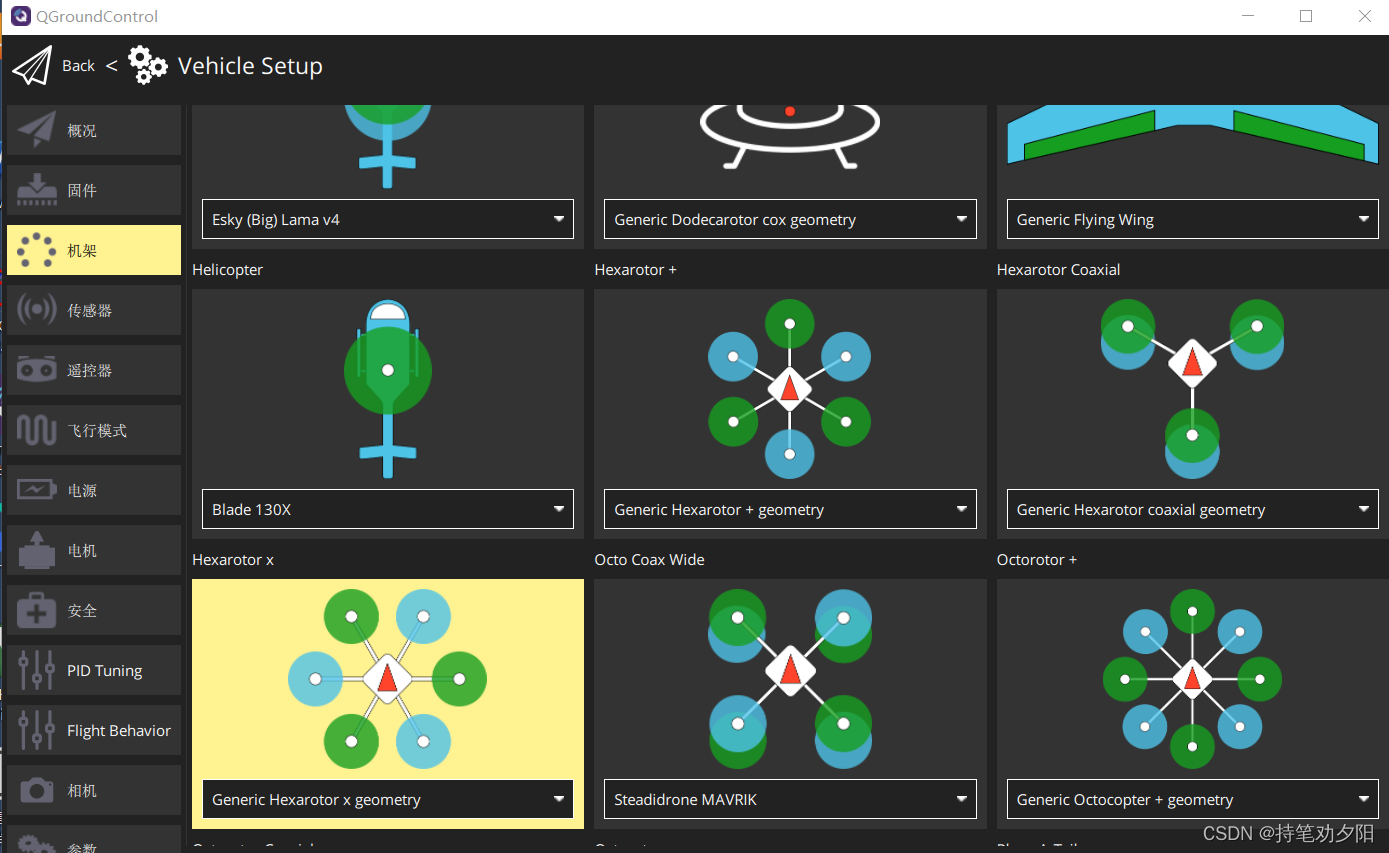
根据自己的飞机选择机架,四旋翼一般选择图1机架,六旋翼一般选择图2机架。
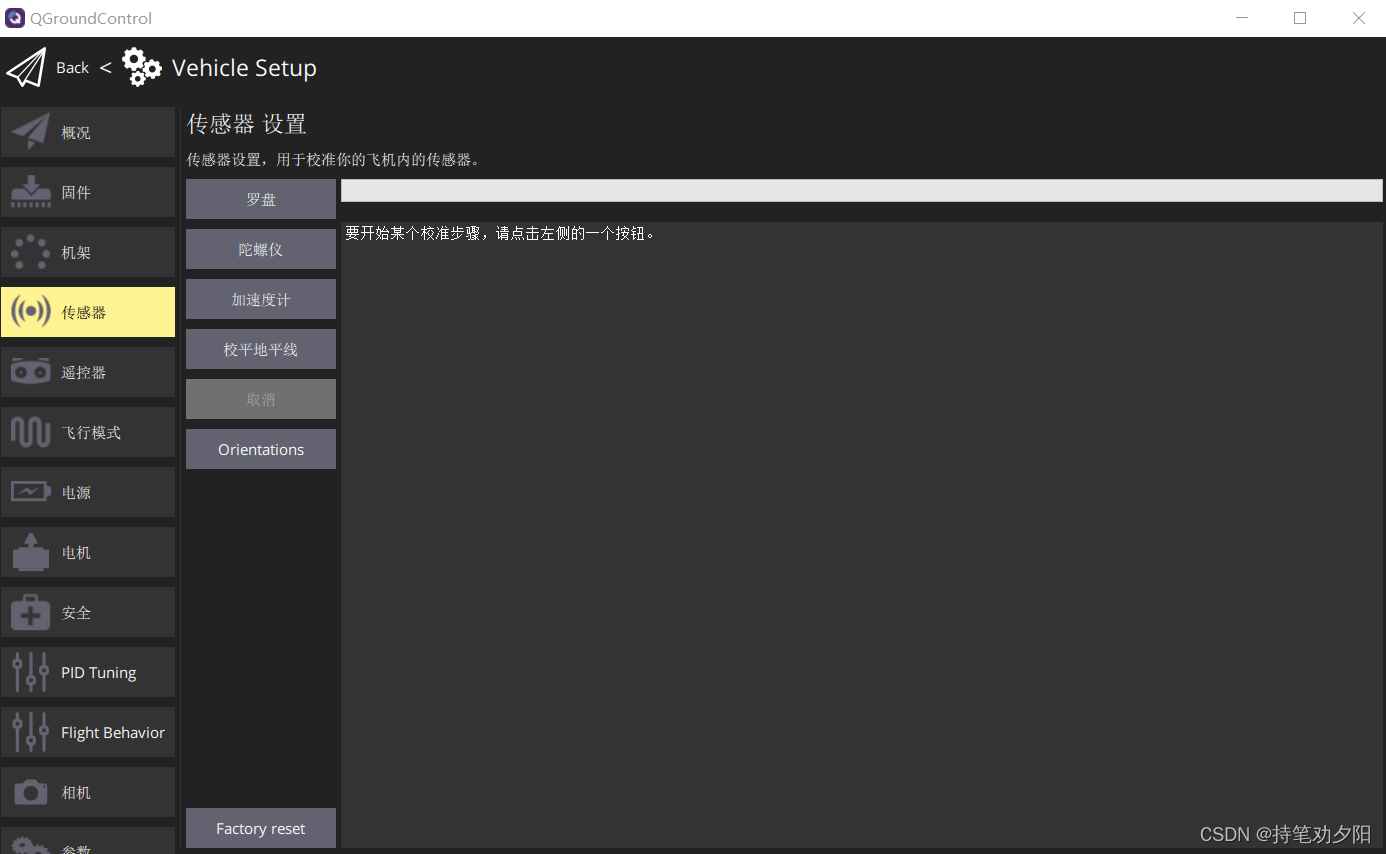
3.校准传感器
按照顺序依次校准传感器,最后一项Orientations不用管,另外罗盘校准很重要,一定要校准,罗盘校准后要点击重启飞行器。
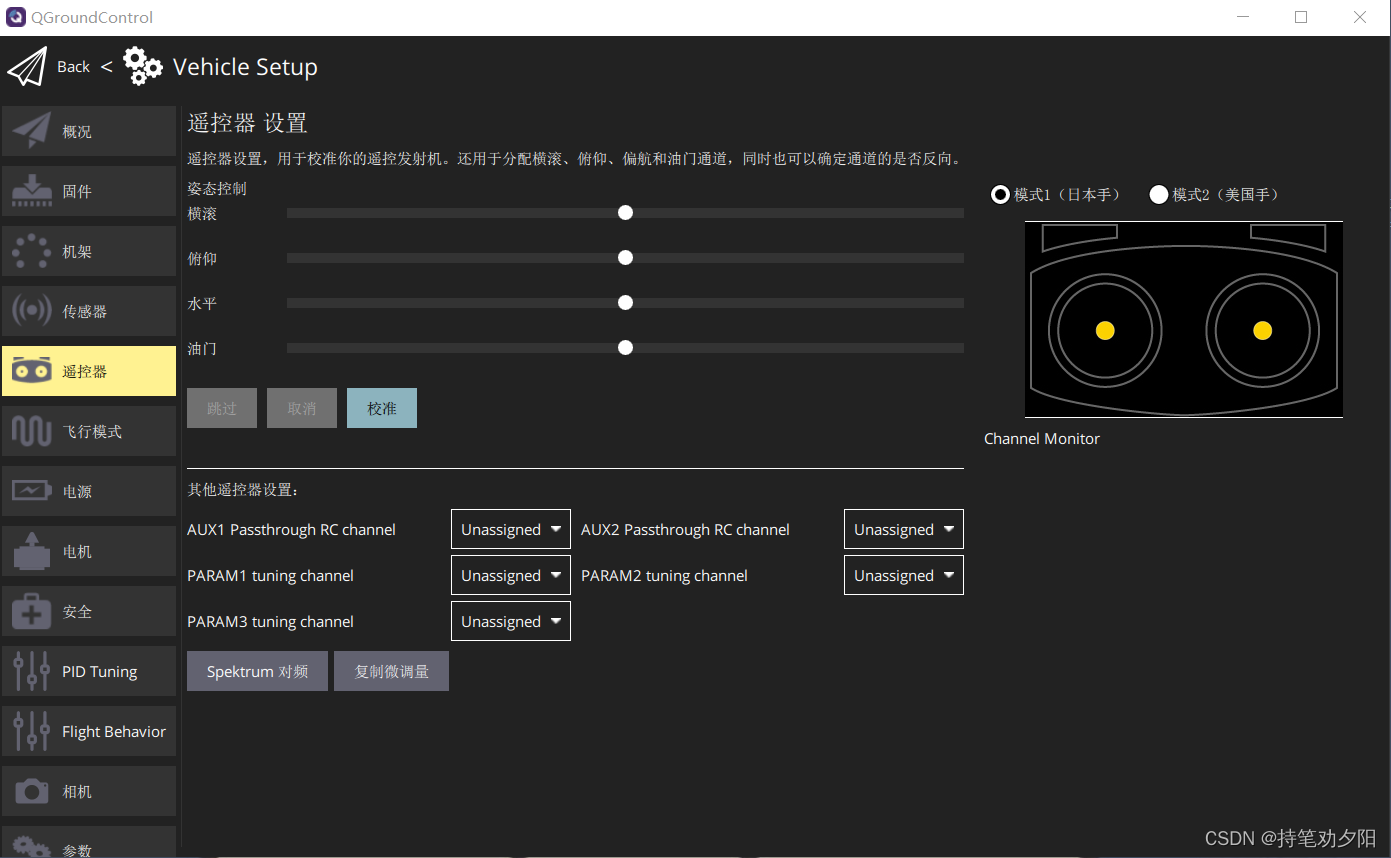
4.校准遥控器
点击图中的校准,然后按右图图形提示校准即可
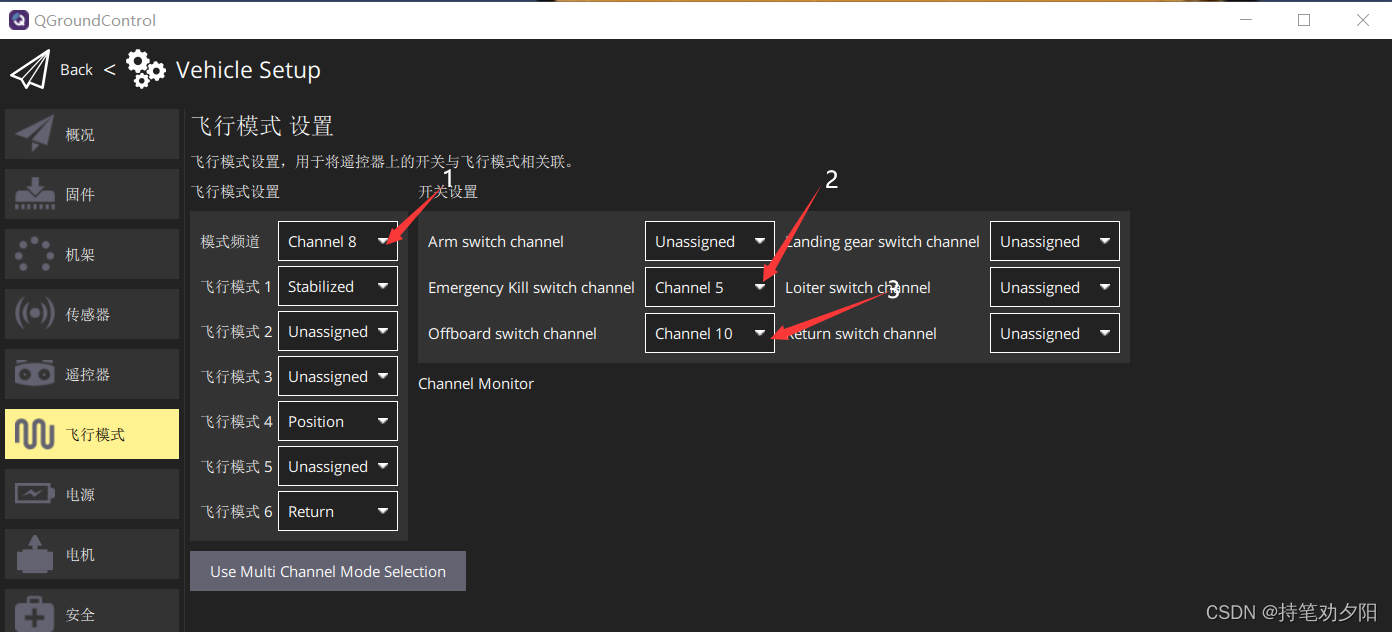
5.飞行模式设置
看个人的拿控喜好和需求,手飞一般设置1来改变模式,模式一般设置自稳,定高,降落。安全开关在2来设置通道,自动飞行就是off board模式在3来设置通道切换。
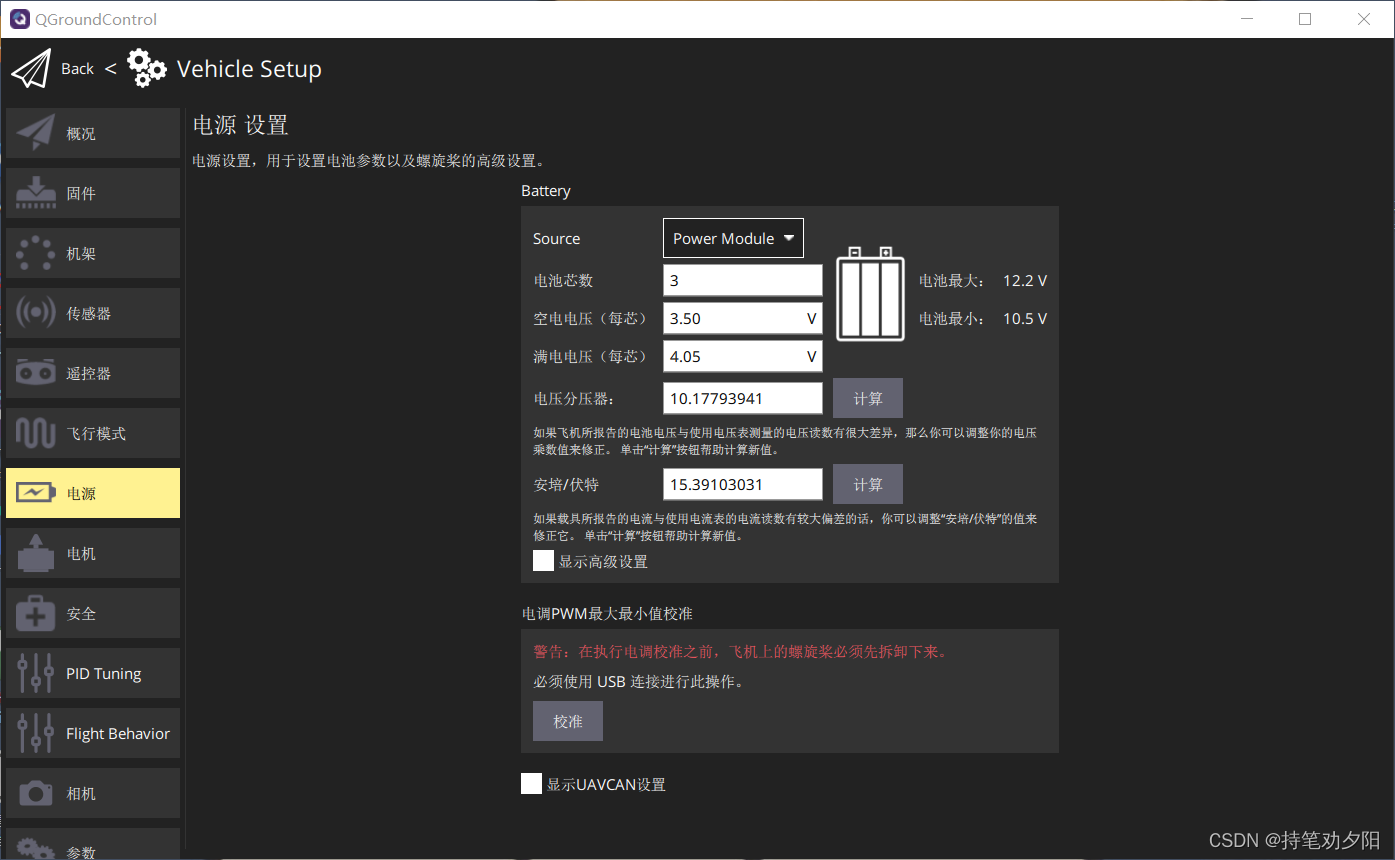
6.校准电调
点击下方校准,然后通过电流计插上电池给飞控供电,等待校准完成(一定要点击校准后插点池),一般校准失败是电流计出问题了。
7.参数设置
CBRK_SUPPLY_CHK
这个参数是检查解锁时是否有电池供电,默认是需要插电流计供电才可以解锁。如果想通过其他方式(如ESC供电)给飞控供电进行解锁,则需要设置该参数为894281。
CBRK_USB_CHK
这个参数是检查起飞时是否有USB连接,默认情况下有USB连接时是无法解锁的,如果需要插USB解锁,需要设置为197848
飞控解锁不了一般修改COM_ARM_...这些参数。如果陀螺仪出现类似报错COM_ARM_IMU_ACC改大一些;如果罗盘报某个没度数的参数,可以把COM_ARM_MAG_ANG设为-1。

















 847
847

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









