






文章:Multi-Session, Localization-oriented and Lightweight LiDAR Mapping Using Semantic Lines and Planes
作者:Zehuan Yu, Zhijian Qiao, Liuyang Qiu, Huan Yin and Shaojie Shen
编辑:点云PCL
欢迎各位加入知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。
公众号致力于点云处理,SLAM,三维视觉,高精地图等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。侵权或转载联系微信cloudpoint9527。
摘要
本文提出了一个用于城市环境中的多会话激光雷达(LiDAR)建图的集中式框架,该框架利用轻量级线和平面地图表示,而不是广泛使用的点云。所提出的框架以粗到精的方式实现一致性的建图。通过在Grassmann流形上关联线和平面,实现了全局位置识别,随后采用剔除异常值的位姿图优化来合并地图。然后,还设计了一种新颖的捆集调整方法,以改善线和平面的局部一致性。在实验部分,使用了公共和自行收集的数据集来证明其效率和有效性。广泛的结果验证了我们的LiDAR建图框架能够全局合并多个会话地图,逐步优化地图,并适用于轻量级机器人定位。
主要贡献
总的来说,本研究的主要贡献可以总结如下:
• 提出了一个轻量级、一致性强、适用于城市环境的多会话LiDAR建图框架,其中包括线和平面。
• 设计了一个全局地图合并方法,该方法基于线和平面在Grassmann流形上,确保位姿图优化的全局一致性。
• 提出了一种新颖的捆绑调整方法,该方法使用参数化的线和平面,提高了LiDAR映射的一致性。
• 我们的提出的框架经过了公共数据集、自动驾驶模拟器以及大规模城市环境中的多会话数据的验证。

内容概述
A. 从点云数据获取线和平面RIPTION
LiDAR里程计与语义分割:首先,利用已广泛研究的LiDAR里程计技术作为前端工具,获取每个雷达的里程计数据和原始点云子地图。通过对旋转和平移的变化生成子地图的关键帧。然后使用开源方法获取LiDAR扫描的语义标签。密集的语义点云用于后续特征提取和参数化。
语义特征提取:根据城市环境的先验知识,选择了几种特定类型的语义地标,如电线杆、道路、建筑物和围栏,作为地图元素。这些元素通常存在于城市环境中,并具有紧凑的几何表示。电线杆被表示为无限线,而其他地标被表示为无限平面。使用聚类算法和基于体素的分割算法从密集的语义点云中提取这些线和平面特征。这些线和平面特征是低维度的地标,与密集点云相比具有更少的参数,同时仍保留原始的几何信息,使它们在大规模城市环境中的地图管理中非常有用。
轻量级地图结构:在线地图生成过程中,初始化和更新线和平面地标,其中数据关联基于基于质心的最近邻搜索方法构建了共视结构。定义了线地标和平面地标,包括语义标签、质心、法线、最小参数块以及在不同关键帧中的观测,类似于视觉捆绑结构。
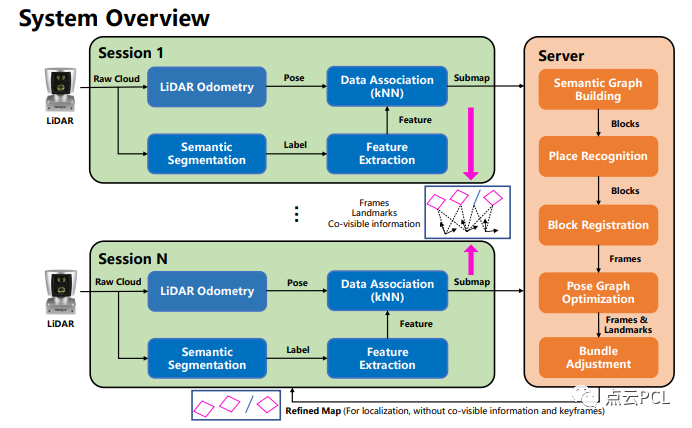
图2. 系统概览。在线地图制作和集中式地图服务器分别显示为绿色和橙色的块。子地图包括轻量级地标,包括线和平面,以及关键帧和地标之间的共视连接。地图服务器通过从头开始以粗到精的方式实现多会话地图制作,首先进行全局地图合并,然后进行局部优化。
B.全局地图合并
构建语义图:为了合并不同位置的子地图,必须全局解决地点识别和相对位姿估计这两个关键挑战,而无需初始猜测。传统方法通常使用完整的激光扫描数据构建手工制作或基于学习的全局描述符。在这种情况下,采用GraffMatch算法,这是一种不需要全局描述符的方法,它基于开源的数据关联框架,用于识别两个子地图之间的重叠部分。然而,由于每个子地图包含众多地标,图匹配问题的维度非常高,导致无法管理的解决时间。姿势图优化为关键帧和地标提供了更高精度的全局位姿。但是,可能存在在多个子地图中多次包括的地标。为了减小地图的大小和后续优化的维度,这些地标的实例将根据图匹配结果或质心距离进行合并。
线和平面的捆集调整:在合并了子地图之间的重叠地标之后,引入了一种新的捆集调整公式,以共同优化关键帧的位姿、线地标和平面地标,以提高地图的准确性。
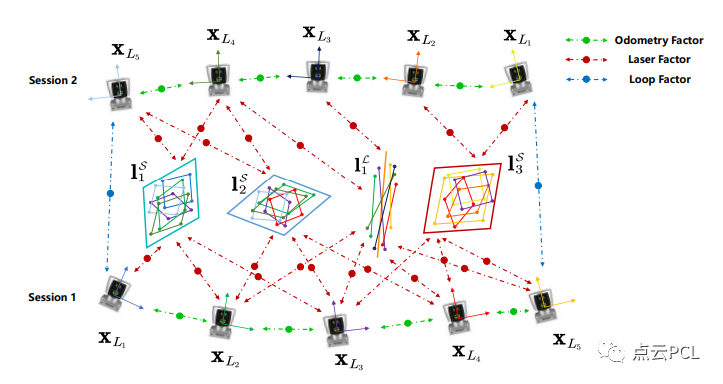
图4. 多会话LiDAR地图制作的地标定义和因素:使用LOAM获取的里程计因素(绿色),使用GraffMatch获取的环路因素(蓝色),以及通过提出的捆绑调整获得的激光因素(红色)。
C.姿态图优化
姿态图优化为关键帧和地标提供了更高精度的全局姿态,然而,可能存在多个子图中反复包含的地标。为了减小地图的大小和后续优化的维度,这些地标在多个子图中的实例将根据图匹配结果或质心距离而合并。在合并了子图之间的重叠地标之后,引入了一个新的捆集调整公式,以联合优化关键帧的姿态、线地标和平面地标,以提高地图的精度。
实验
为了评估我们的框架的有效性,我们选择了KITTI数据集,一个现实世界的数据集,以及CARLA仿真器,一个虚拟数据集。这两个数据集提供了大量的语义辅助扫描和地面真实姿势,可以用来构建和评估我们的地图制作框架。
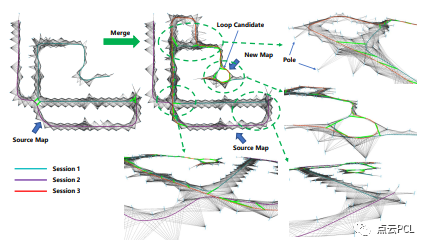
图5. CARLA模拟器上地图合并和鸟瞰视图的共视连接案例。
如表I所示,我们的捆集调整算法可以改善每个轨迹的相对姿态误差,这意味着局部地图的一致性得到改善。

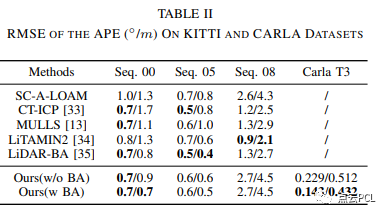
地图合并的案例研究如图5所示。为了评估地图的准确性,在表II中显示了全局轨迹的定量结果。
我们还在CARLA数据集上展示了地图制作的结果,如图6所示。

图6. 在CARLA模拟器上的鸟瞰地图制作结果,多会话数据是由装备LiDAR的车辆在一个城镇中收集的。
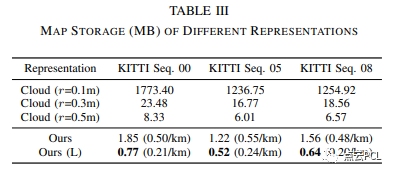
我们还评估了我们提出的地图表示相对于传统的点云地图的轻量性。为此在KITTI数据集上进行了实验,并将我们的轻量级地图的存储需求与具有不同下采样分辨率r的密集点云地图进行了比较。如果我们的地图仅用于定位而没有帧或共视信息,它将仅包括线条和平面地标,并且我们用(L)标签强调了这一点。结果总结在表III中。
在图7中呈现了一个可视化结果,以帮助理解我们提出的基于轻量级地图的在线定位。
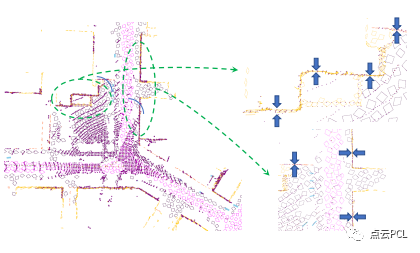
图7. 在KITTI数据集上的在线定位可视化。
总结
在本文中,我们提出并验证了一个适用于城市环境的多会话、定位导向和轻量级的激光雷达地图框架。该框架包括全局地图合并和本地细化,仅在流程中使用语义线和平面。生成的地图与点云地图相比较轻量,可以支持在线机器人定位。未来工作有几个有希望的方向,可以改进和扩展所提出的框架。我们的最终目标是在城市规模的环境中实现高效的众包地图制作。
资源
自动驾驶及定位相关分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
自动驾驶中基于激光雷达的车辆道路和人行道实时检测(代码开源)
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
结构化PLP-SLAM:单目、RGB-D和双目相机使用点线面的高效稀疏建图与定位方案
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除

扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入知识星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享与合作方式:微信“cloudpoint9527”(备注:姓名+学校/公司+研究方向) 联系邮箱:dianyunpcl@163.com。
为分享的伙伴们点赞吧!
















 8951
8951











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











