








 超级会员免费看
超级会员免费看

 BAAF-Net是一种用于点云语义分割的深度学习方法,其核心是双边上下文组件(Bilateral Context Module)和自适应融合模块。组件通过双边聚合增强局部上下文信息,并利用增强损失保持几何形状完整。混合局部聚合策略解决了非参数对称函数的局限。解码器通过自适应融合模块结合不同尺度特征,生成综合特征图用于语义分割。
BAAF-Net是一种用于点云语义分割的深度学习方法,其核心是双边上下文组件(Bilateral Context Module)和自适应融合模块。组件通过双边聚合增强局部上下文信息,并利用增强损失保持几何形状完整。混合局部聚合策略解决了非参数对称函数的局限。解码器通过自适应融合模块结合不同尺度特征,生成综合特征图用于语义分割。
文章目录
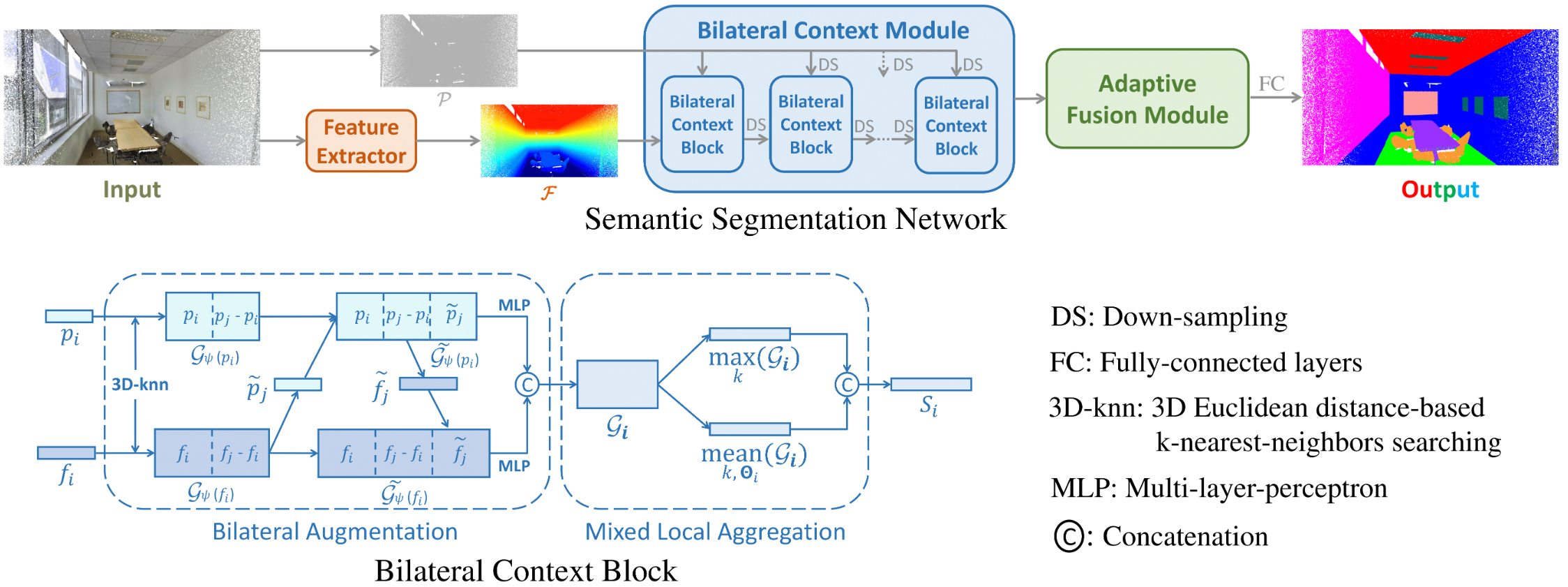
论文地址:Semantic Segmentation for Real Point Cloud Scenes
via Bilateral Augmentation and Adaptive Fusion
一、本文贡献
使用双边结构增加点的局部上下文信息。
自适应融合多分辨率特征。
提了了一种新的点云语义分割网络。
二、双边上下文组件(Bilateral Context Module)
双边上下文组件由多个双边上下文模块(Bilateral Context Block)组成。我们先来看一个BCB的内部结构,一个BCB由双边聚合(Bilateral Augmentation)和混合局部聚合(Mixed Local Aggregation)组成,如下图:

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3760
3760

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











