









多智能体系统是近十年来发展起来的一种新型的、具有广阔的应用前景的多智能体系统。由于实际应用中的系统大都是非线性的,因此本论文针对多智能体系统进行了研究。因为多智能体系统必然包括多个智能体,这些智能体可以互相沟通,以达到一致的目的。但是,当一个或多个智能设备出现故障时,它就会继续向下传递,最终影响到整个系统,从而使控制任务失效。因此,在多主体系统中,必须进行容错控制,以确保其稳定和安全。分布式的一致性控制一般是为了根据各个子系统自身的可利用信息来设计控制器,这样就可以保证网络连接系统的状态和输出。这种控制问题又可分为有领导一致性和有领导一致性两种,这取决于最后一致的目的是不是预定的。在此基础上,本论文以一种基于导航的非线性多智能体系统为研究对象。在已有的分布式容错控制技术的基础上,重点研究了在执行机构失效时,非线性多智能体系统的一致性容错控制问题。
一、状态已知下,基于反步法的自适应容错控制方案
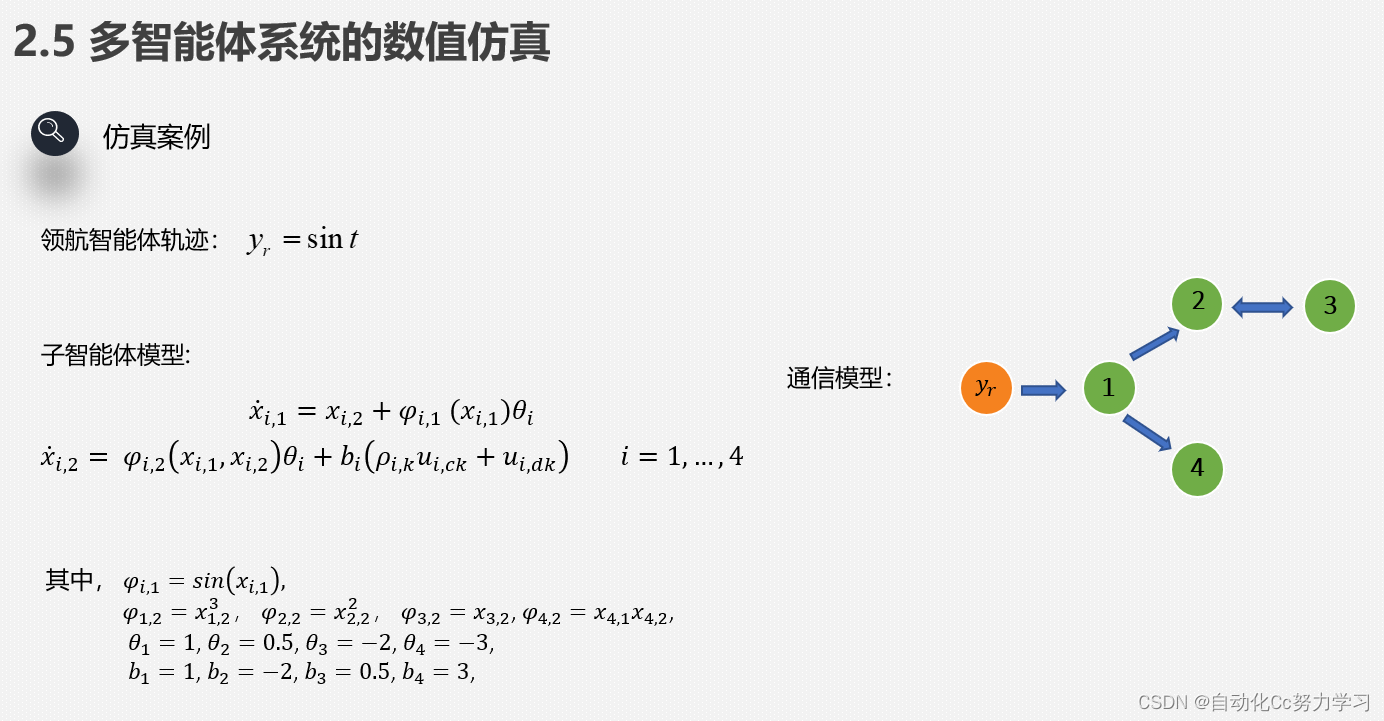
研究了一类具有未知参数的严格反馈非线性系统的自适应容错控制问题,实现了多智能体系统的输出一致性。针对执行器的乘性故障和加性故障,本章提出了一种基于反步设计方法的分布式自适应容错控制器。同时在设计过程中,在每个子系统的局部控制器中引入了对于期望轨迹及其邻居智能体不确定参数的估计,可以避免在线参数估计的信息交换和连接子系统之间的局部同步误差。同时证明了所有闭环信号的有界性和所有子系统输出的一致性。通过数值仿真算例表明了所有子智能体都可以在一定时间内快速追随于领航智能体,误差较小,验证了本章控制方案的有效性。
二、BACKSTEPPING推导过程
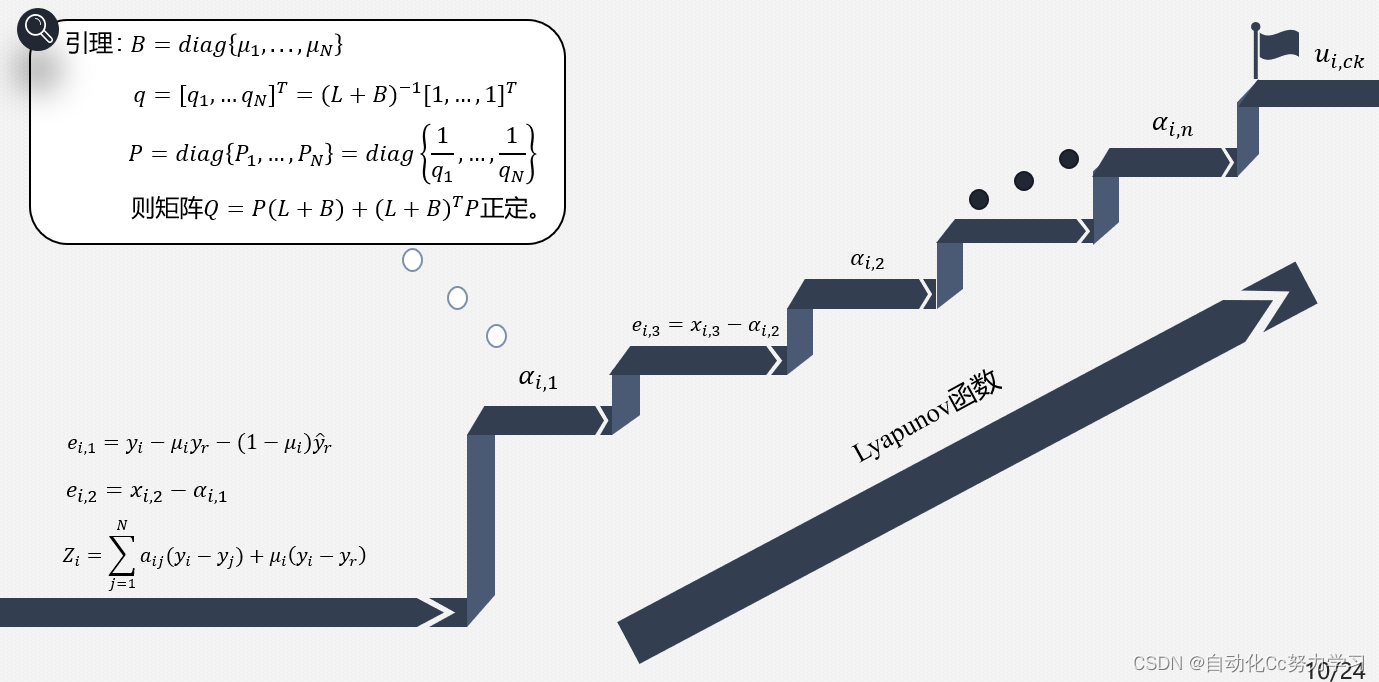
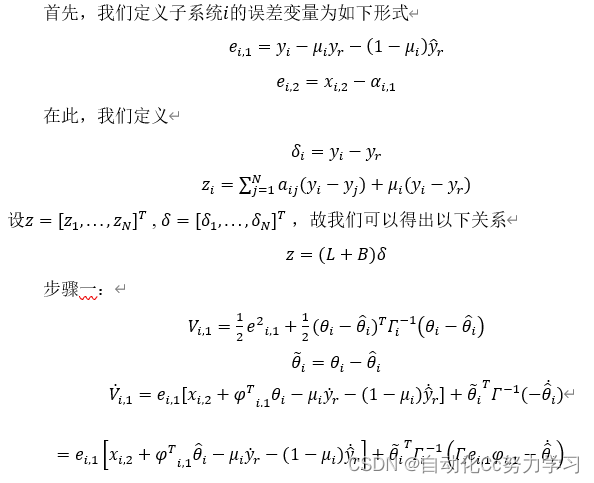
此处省略过多推导

三、仿真
提示:这里对文章进行总结:

仿真资源:https://download.csdn.net/download/wXHccc183/86094316?spm=1001.2014.3001.5503


















 2225
2225

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











