









WIFI无线测距技术(2)
6.提高测距精度
对于智能手机或其他移动设备,Wi-Fi无线电将其范围测量传递到移动设备的操作系统(例如,Android),从而使这些测量可供应用程序环境使用,供应用程序开发人员使用其基于位置的解决方案(例如,室内导航、访问控制、资产跟踪等)。为了提高这些范围估计的准确性,应用程序开发人员使用统计方法,如多个测量的平均和位置跟踪算法,这些算法使用特定距离的多个单独测量来计算该距离的更准确的最终测量。
6.1.平均数
顾名思义,平均包括对一个特定的距离进行多次测量,并计算它们的平均值。这种方法比只使用一种测量方法更可靠,并提供了更低的错误率。图6.1中的图表显示了平均对测距误差的影响。这些数据是作为为汽车数字密钥用例进行的广泛测量活动的一部分收集的,但该概念和结果可以应用于不同应用程序空间的解决方案。在这个特殊的例子中,一个涉及距离测量的Wi-Fi设备被放置在靠近刹车踏板旁边的地板上,而用户将另一个Wi-Fi设备(他/她的智能手机)放在后口袋里。在这种情况下,“突发”或“测量突发”只是单个距离测量的集合。
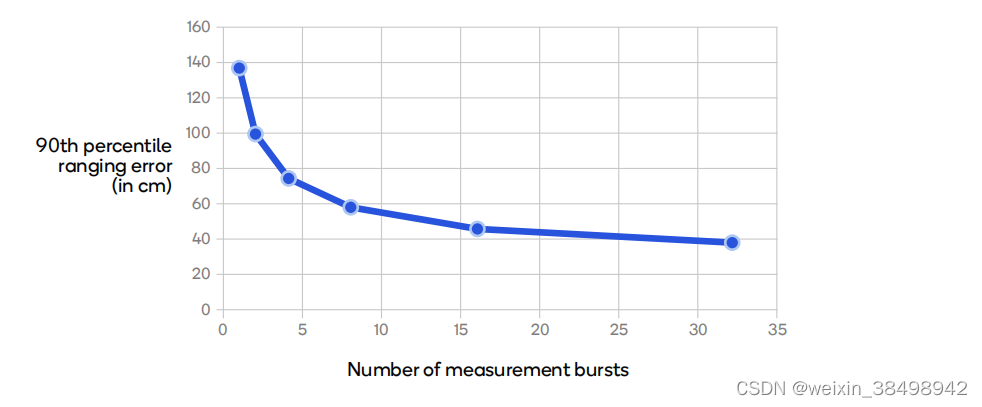
图6.1使用访问5 GHz频段和80MHz通道的2x2 Wi-Fi设备进行多个测量突发的平均对测距误差的影响
在此图中,测距误差用第90百分位的情况表示,这意味着测距误差低于90%的案例中引用的数字,只有10%的案例中更高。第90百分位的范围误差从一次爆发时的135厘米下降到测量值平均超过32次爆发的情况下的39厘米。每个脉冲包含多达5个距离测量,需要20到30 ms。使用今天一代的Wi-Fi技术,32次脉冲的总测量时间不到1秒。
6.2.位置跟踪算法
位置跟踪算法,如卡尔曼滤波,是另一种大大提高距离估计精度的方法。为了证明这一点,我们将卡尔曼滤波算法应用于前一节中讨论的汽车数字密钥用例中收集的数据。图6.2显示了应用于用户(及其智能手机)以线性方式向车辆移动的场景的卡尔曼滤波的使用。卡尔曼滤波器预测和修正了对手机运动轨迹的估计,以提高测距精度。在不到0.5秒的时间内,测距误差远低于10厘米(第90百分位为5厘米,第99百分位为7厘米)。
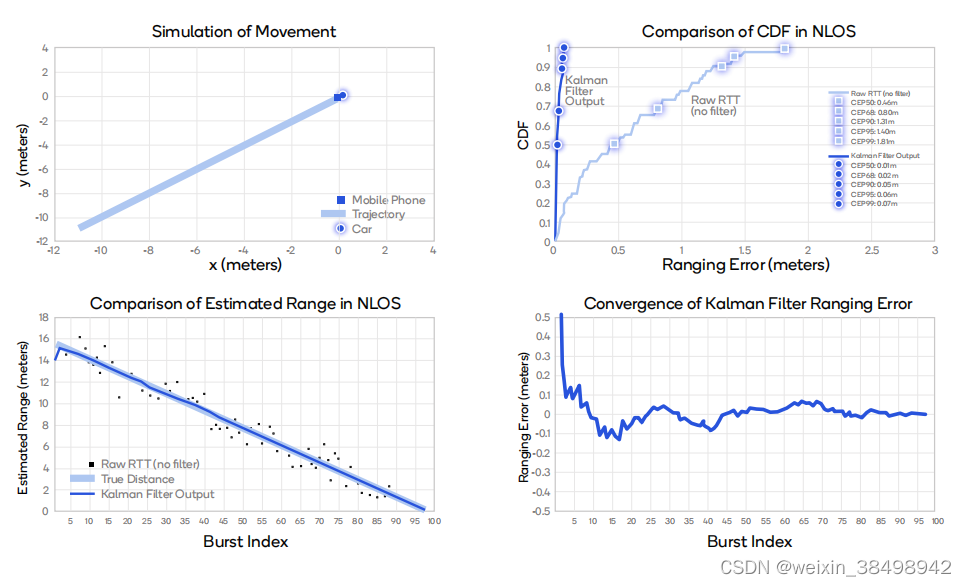
图6.2应用于汽车数字密钥用例的卡尔曼滤波-使用2 GHz Wi-Fi设备和20MHz通道向车辆线性移动
在图6.2中,左上角的图显示了手机的移动方向。左下角的图显示了测量脉冲(红点)、手机和车辆之间的真实距离(绿色),以及卡尔曼滤波输出(蓝色)。在这幅图中,在卡尔曼滤波收敛后,绿色曲线和蓝色曲线实际上是相互重叠的,这表明由卡尔曼滤波得到的估计非常接近实际距离。右上的图是累积分布函数(CDF),这表明对于第90百分位情况,初始非平均结果的精度为131 cm,而卡尔曼滤波器的输出精度为5 cm。最后,右下角的图显示了卡尔曼滤波器收敛的速度。卡尔曼滤波器只需要三次测量脉冲就能收敛并达到小于20厘米的测距误差。
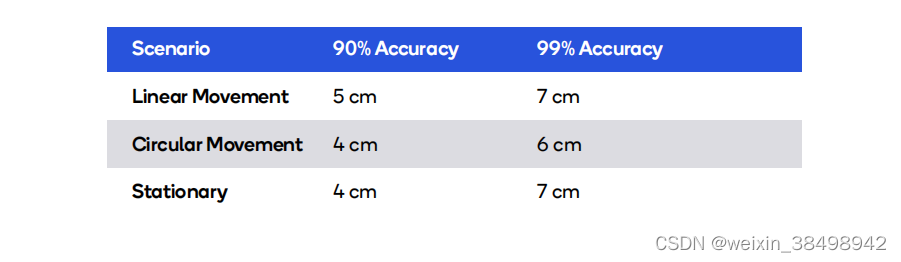
除了线性运动场景外,卡尔曼滤波还被应用于手机在车辆周围以圆周移动和手机静止的场景。所有的案例都假定没有关于运动的先验知识。表6.3列出了在所有三种情况下使用卡尔曼滤波实现的测距误差水平。
当应用程序开发人员和其他解决方案实现者可以考虑额外的信息,如先前的行为或来自设备中其他传感器(如罗针、加速度计)的信息时,这种准确性有更大的改进潜力。
7.无线距离测量结果
当扫描科学文献以获得实际Wi-Fi测距测试的测量结果时,很明显,很少有对已公布的结果进行的测量活动。本节分享了两个测量活动的结果,它们都是使用现有的几代高通Wi-Fi技术进行的。第一次测试是在Wi-Fi联盟测试实验室的室内设置中进行的,第二次测试是在车辆设置中进行的,以分析该技术对汽车用案例的潜在适用性。
7.1.室内视线测量值
以下测量数据是在位于圣克拉拉的Wi-Fi联盟实验室举行的Wi-Fi联盟互操作性活动中收集的。测量是在轻度多路径条件下的室内视线(LOS)环境下进行的。所使用的Wi-Fi设备是基于高通技术的软接入点参考设计和基于高通技术的客户端参考设计,使用80 MHz模式。
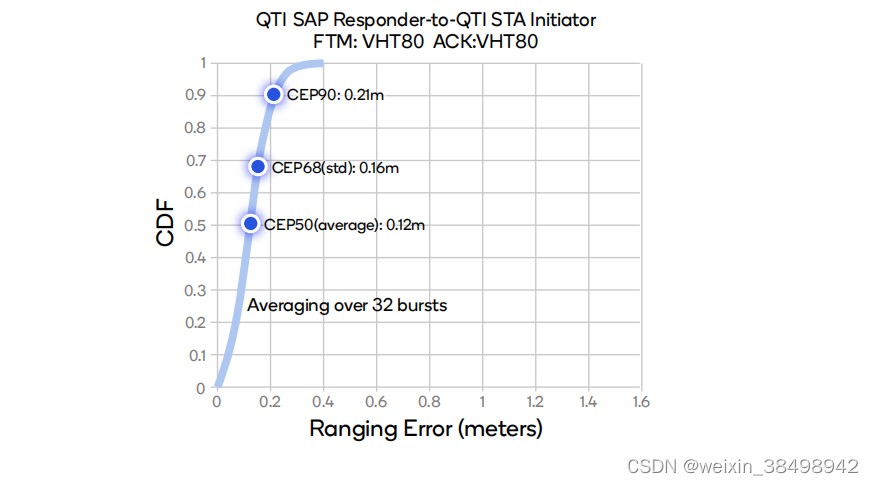
图7.1说明了这些测量值的测距精度。在解释这些结果时,请记住,它们还没有包括跨多个突发的平均应用,也没有使用任何位置跟踪算法。
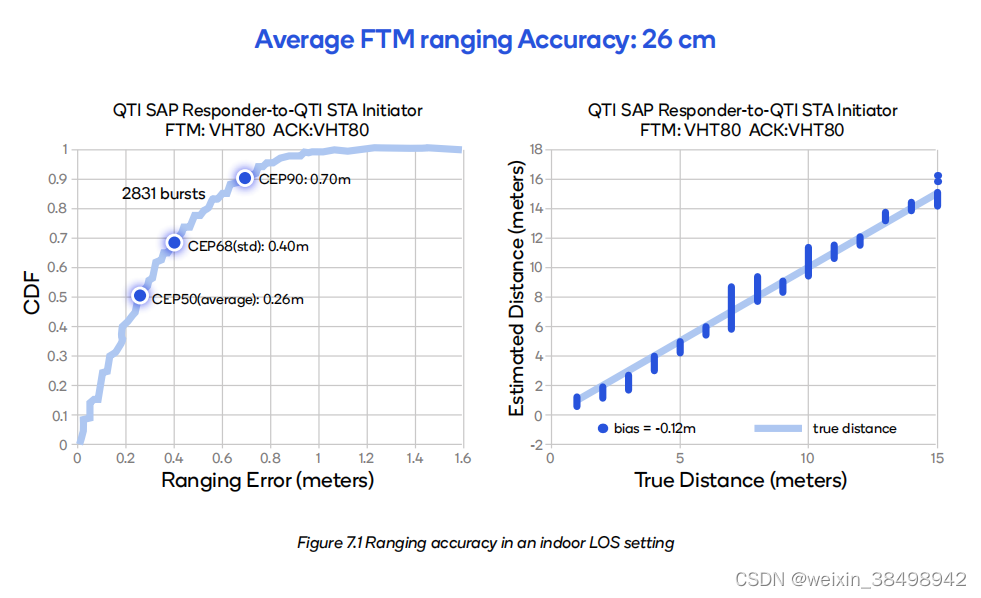
图7.2显示了平均超过32次爆发后精度的提高。一旦完成,第90百分位的精度提高到21厘米,平均为12厘米。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









