





 本文详细解析了如何通过平移向量和旋转角度将点P从一个坐标系转换到另一个坐标系的过程,包括从O’Xθ’Yθ’坐标系转换到O’X’Y’坐标系,以及最终转换到OXY坐标系的方法。
本文详细解析了如何通过平移向量和旋转角度将点P从一个坐标系转换到另一个坐标系的过程,包括从O’Xθ’Yθ’坐标系转换到O’X’Y’坐标系,以及最终转换到OXY坐标系的方法。
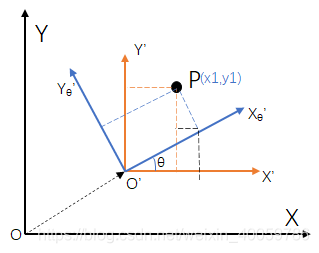
已知:平移向量OO’ =(a,b) ,P在O’Xθ’Yθ’坐标系下的坐标为(x1,y1), O’Xθ’Yθ’坐标系和O’X’Y’坐标系的旋转角度为θ
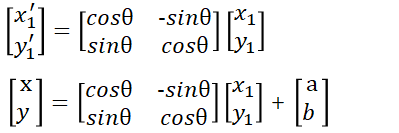
求:P在O’X’Y’坐标系(x1’,y1’)和OXY坐标系下的坐标(x,y)

已知:平移向量OO’ =(a,b) ,P在O’Xθ’Yθ’坐标系下的坐标为(x1,y1), O’Xθ’Yθ’坐标系和O’X’Y’坐标系的旋转角度为θ
求:P在O’X’Y’坐标系(x1’,y1’)和OXY坐标系下的坐标(x,y)
 3171
3171

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























