







学习笔记—《无人驾驶车辆模型预测控制》龚建伟。
本章内容:本章为实例分析,采用运动学模型对参考轨迹进行跟踪控制。
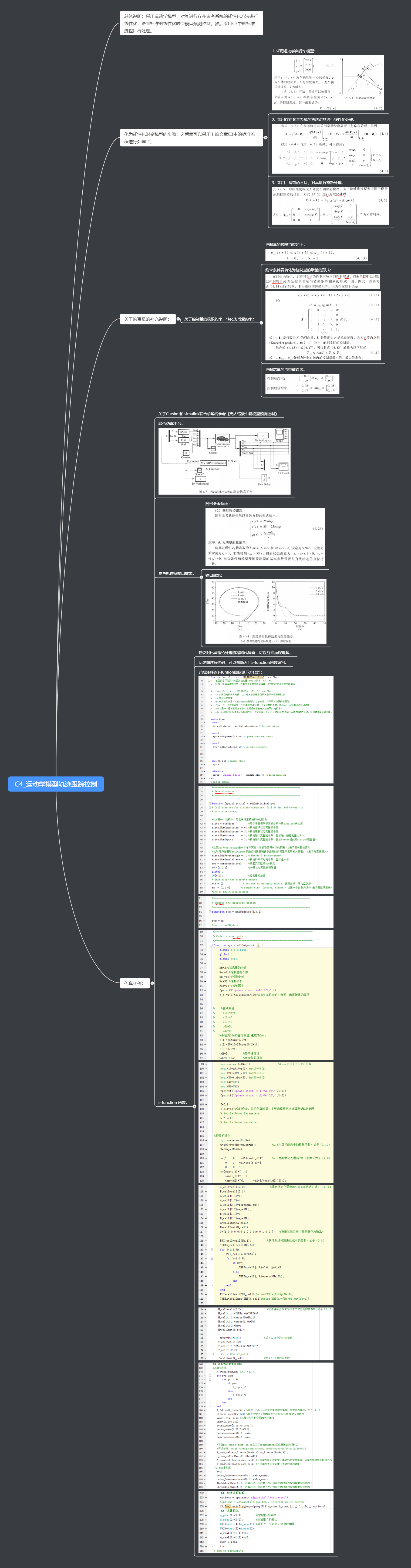
主要思路:采用运动学模型,对其进行存在参考系统的线性化方法进行线性化,得到标准的线性化时变模型预测控制,然后采用上一片博客C3中的标准流程进行处理。
下图片源文件见这里,点开可以更加清晰的分级查看。
学习笔记—《无人驾驶车辆模型预测控制》龚建伟。
本章内容:本章为实例分析,采用运动学模型对参考轨迹进行跟踪控制。
主要思路:采用运动学模型,对其进行存在参考系统的线性化方法进行线性化,得到标准的线性化时变模型预测控制,然后采用上一片博客C3中的标准流程进行处理。
下图片源文件见这里,点开可以更加清晰的分级查看。
 1535
2538
3万+
3697
1535
2538
3万+
3697











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























