







 本文深入探讨了控制系统稳定性分析的关键概念和方法,包括系统稳定性的数学描述、劳斯–赫尔维茨稳定性判据、乃奎斯特稳定性判据及其在不同类型系统中的应用。
本文深入探讨了控制系统稳定性分析的关键概念和方法,包括系统稳定性的数学描述、劳斯–赫尔维茨稳定性判据、乃奎斯特稳定性判据及其在不同类型系统中的应用。
Überblick
第5章 控制系统的稳定性分析
5.1 系统稳定性的概念
稳定:原来处于平衡状态的系统,在受到扰动作用后都会偏离原来的平衡状态。若系统在扰动作用消失后,经过一段过度过程后,系统仍然能够回复到原来的平衡状态,则称该系统是(渐进)稳定的。否则,则称该系统是不稳定的。
这是一种系统自身固有的特性,取决于系统本身的结构和参数,与输入无关。
按照稳定程度的不同可以将稳定分为三类。
稳定,不稳定和临界稳定。所谓临界稳定指的是:若系统在扰动消失后,输出与原始的平衡状态间存在恒定的偏差或输出维持等幅振荡,则系统处于临界稳定状态。

5.2 系统稳定的充要条件
通过5.1中的言语定义我们可以对之进行一个数学描述:
假设系统在零初始条件下,受到单位脉冲信号
δ
(
t
)
\delta(t)
δ(t)的作用,此时系统的输出增量(偏差)为单位脉冲响应,研究单位脉冲响应的结果:
如果有:
lim
t
→
∞
x
o
(
t
)
=
0
,
则
系
统
(
渐
进
)
稳
定
lim
t
→
∞
x
o
(
t
)
=
∞
,
则
系
统
不
稳
定
\lim\limits_{t\to\infty}x_o(t)=0,则系统(渐进)稳定\\ \lim\limits_{t\to\infty}x_o(t)=\infty,则系统不稳定
t→∞limxo(t)=0,则系统(渐进)稳定t→∞limxo(t)=∞,则系统不稳定
那么根据终值定理我们不难得出如下结论:
对于系统闭环传递函数形如:
G
b
(
s
)
=
X
o
(
s
)
X
i
(
s
)
=
G
(
s
)
1
+
G
(
s
)
H
(
s
)
G_b(s)={X_o(s)\over X_i(s)}={G(s)\over1+G(s)H(s)}
Gb(s)=Xi(s)Xo(s)=1+G(s)H(s)G(s)
我们称
1
+
G
(
s
)
H
(
s
)
=
0
1+G(s)H(s)=0
1+G(s)H(s)=0为系统的特征方程。特征方程的根我们称之为特征根。如果一个系统的特征根全部落在[s]平面的左半部分,则该系统时稳定的;否则系统不稳定。
简单地阐述一下原因:如果系统的特征根存在正实部,这样一来这个系统的原函数中就必然包含 e T t , T > 0 e^{Tt},T>0 eTt,T>0项,这样的系统是肯定不能稳定的。
5.3 代数稳定性判据
5.3.1 充分条件
设系统地特征方程式为:
a
0
s
n
+
a
1
s
n
−
1
+
⋯
+
a
n
−
1
s
+
a
n
=
0
a
0
(
s
n
+
a
1
a
0
s
n
−
1
+
⋯
+
a
n
−
1
a
0
s
+
a
n
a
0
)
=
0
a
0
(
s
−
s
1
)
(
s
−
s
2
)
…
(
s
−
s
n
)
=
0
a_0s^n+a_1s^{n-1}+\dots+a_{n-1}s+a_n=0 \\a_0\left(s^n+{a_1\over a_0}s^{n-1}+\dots+{a_{n-1}\over a_0}s+{a_n\over a_0}\right)=0 \\a_0(s-s_1)(s-s_2)\dots(s-s_n)=0
a0sn+a1sn−1+⋯+an−1s+an=0a0(sn+a0a1sn−1+⋯+a0an−1s+a0an)=0a0(s−s1)(s−s2)…(s−sn)=0
其中
s
1
,
s
2
,
…
,
s
n
s_1,s_2,\dots,s_n
s1,s2,…,sn为系统的特征根。
根据韦达定理1:
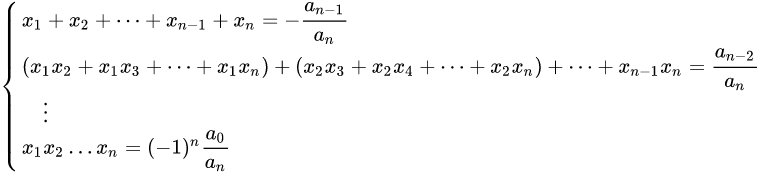
我们不难发现判断系统稳定性的一个必要条件即为:特征方程的各项系数的符号都相同。当然,满足这一条件并不充分。所以我们需要进一步研究判断系统稳定性的充要条件:
5.3.2 充要条件:劳斯–赫尔维茨稳定性判据
5.3.2.1 劳斯判据
5.3.2.1.1 一般解法
如果劳斯阵列中第一列所有项均为正,则系统稳定:
| s n s^n sn | a 0 a_0 a0 | a 2 a_2 a2 | a 4 a_4 a4 | a 6 a_6 a6 | … \dots … |
|---|---|---|---|---|---|
| s n − 1 s^{n-1} sn−1 | a 1 a_1 a1 | a 3 a_3 a3 | a 5 a_5 a5 | a 7 a_7 a7 | … \dots … |
| s n − 2 s^{n-2} sn−2 | b 1 b_1 b1 | b 2 b_2 b2 | b 3 b_3 b3 | b 4 b_4 b4 | … \dots … |
| s n − 2 s^{n-2} sn−2 | c 1 c_1 c1 | c 2 c_2 c2 | c 3 c_3 c3 | c 4 c_4 c4 | … \dots … |
| ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ||
| s 2 s^2 s2 | u 1 u_1 u1 | u 2 u_2 u2 | |||
| s 1 s^1 s1 | v 1 v_1 v1 | ||||
| s 0 s^0 s0 | w 1 w_1 w1 |
表格当中,
a
i
a_i
ai即为特征方程当中的系数,其他的项计算方法如下所示:
b
1
=
a
1
a
2
−
a
0
a
3
a
1
,
b
2
=
a
1
a
4
−
a
0
a
5
a
1
,
b
3
=
a
1
a
6
−
a
0
a
3
a
1
…
c
1
=
b
1
a
3
−
a
1
b
2
b
1
,
c
2
=
b
1
a
5
−
a
1
b
3
b
1
,
c
3
=
b
1
a
5
−
a
1
b
3
b
1
…
b_1={a_1a_2-a_0a_3\over a_1},b_2={a_1a_4-a_0a_5\over a_1},b_3={a_1a_6-a_0a_3\over a_1}\dots \\c_1={b_1a_3-a_1b_2\over b_1},c_2={b_1a_5-a_1b_3\over b_1},c_3={b_1a_5-a_1b_3\over b_1}\dots
b1=a1a1a2−a0a3,b2=a1a1a4−a0a5,b3=a1a1a6−a0a3…c1=b1b1a3−a1b2,c2=b1b1a5−a1b3,c3=b1b1a5−a1b3…
直接看这些公式非常抽象,用语言来解释一下计算过程:
首先把特征方程地系数添入劳斯整列当中,然后开始计算第三行第一列的元素,这个元素等于它上一行第一列的元素
a
1
a_1
a1乘以它上两行右边一列的元素
a
2
a_2
a2减去它上两行第一列的元素
a
0
a_0
a0乘以它上一行右边一列的元素
a
3
a_3
a3除以它上一行第一列的元素
a
1
a_1
a1。如果某一个元素空缺的话,就当作零来计算。可以把这一段话代入其他的元素来看一下,对照着给出的公式来理解一下。
计算完劳斯阵列后我们可以根据计算值来判断系统实部为正的特征根的数量。
实部为正的特征根数=劳斯阵列中第一列的系数符号改变的次数
下面看一道例题:
设控制系统的特征方程式为
s 4 + 2 s 3 + 3 s 2 + 4 s + 3 = 0 s^4+2s^3+3s^2+4s+3=0 s4+2s3+3s2+4s+3=0
试应用劳斯稳定性判据判断系统的稳定性
首先我们可以发现,所有的系数符号均相同,所以满足充分条件,然后我们可以列出劳斯表:
| s 4 s^4 s4 | 1 | 3 | 3 |
|---|---|---|---|
| s 3 s^3 s3 | 2 | 4 | |
| s 2 s^2 s2 | 2 × 3 − 1 × 4 2 = 1 {2\times3-1\times 4\over2}=1 22×3−1×4=1 | 2 × 3 − 3 × 0 2 = 3 {2\times3-3\times0\over2}=3 22×3−3×0=3 | |
| s 1 s^1 s1 | 1 × 4 − 2 × 3 1 = − 2 {1\times4-2\times3\over1}=-2 11×4−2×3=−2 | ||
| s 0 s^0 s0 | − 2 × 3 − 1 × 0 − 2 = 3 {-2\times3-1\times0\over-2}=3 −2−2×3−1×0=3 |
第一列系数改变符号2此,有两个根的实部为正,控制系统不稳定。
5.3.2.1.2 二阶、三阶简化公式
对于二阶和三阶这些低阶系统,我们可以根据劳斯阵列得出它的简化公式。
二阶系统稳定的充要条件为:
a
0
>
0
,
a
1
>
0
,
a
2
>
0
a_0>0,a_1>0,a_2>0
a0>0,a1>0,a2>0
三阶系统稳定的充要条件为:
a
0
,
a
1
,
a
2
,
a
3
>
0
,
a
1
a
2
>
a
0
a
3
a_0,a_1,a_2,a_3>0,a_1a_2>a_0a_3
a0,a1,a2,a3>0,a1a2>a0a3
5.3.2.1.3 特殊情况
某一行中的第一列元素等于零,但其余各项不全为零:
把等于零的这一项用
ϵ
\epsilon
ϵ代入,认为
ϵ
→
0
\epsilon\to0
ϵ→0。如果0的上下两项符号相同,则系统存在一对虚根,系统临界稳定。如果系统上下两项符号不同,则表明有两个符号变化,系统不稳定,多了两个正实根。
某一行全为零
利用该零行上面一行元素构成辅助多项式,用辅助多项式导数的系数代替该零行,继续计算劳斯阵列中其余各项。然后正常判断。
例如:
| s 6 s^6 s6 | 1 | 8 | 20 | 16 |
|---|---|---|---|---|
| s 5 s^5 s5 | 2 | 12 | 16 | |
| s 4 s^4 s4 | 2 | 12 | 16 | |
| s 3 s^3 s3 | 0 | 0 |
这个时候:
A
(
s
)
=
2
s
4
+
12
s
2
+
16
d
d
t
A
(
s
)
=
8
s
3
+
24
s
A(s)=2s^4+12s^2+16\\{\mathrm{d}\over \mathrm{d}t}A(s)=8s^3+24s
A(s)=2s4+12s2+16dtdA(s)=8s3+24s
于是:
| s 4 s^4 s4 | 2 | 12 | 16 | |
|---|---|---|---|---|
| s 3 s^3 s3 | 8 | 24 | ||
| s 2 s^2 s2 | 6 | 16 | ||
| s 1 s^1 s1 | 8 3 8\over3 38 | |||
| s 0 s^0 s0 | 16 |
系统临界稳定。
5.3.2.2 赫尔维茨判据
会一个得了,另外一个看起来就很麻烦,有兴趣的同学看书吧。
5.4 乃奎斯特稳定性判据
5.4.1 映射定理
对于一个如下图所示的控制系统:
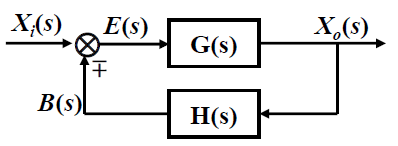
它的开环传递函数形如:
G
K
(
s
)
=
G
(
s
)
H
(
s
)
=
b
m
s
m
+
b
m
−
1
s
m
−
1
+
⋯
+
b
1
s
+
b
0
(
s
−
p
1
)
(
s
−
p
2
)
…
(
s
−
p
n
)
G_K(s)=G(s)H(s)={b_ms^m+b_{m-1}s^{m-1}+\dots+b_1s+b_0\over(s-p_1)(s-p_2)\dots(s-p_n)}
GK(s)=G(s)H(s)=(s−p1)(s−p2)…(s−pn)bmsm+bm−1sm−1+⋯+b1s+b0
它的闭环传递函数形如:
G
B
(
s
)
=
G
(
s
)
1
+
G
(
s
)
H
(
s
)
=
(
s
−
p
1
)
(
s
−
p
2
)
…
(
s
−
p
n
)
1
+
b
m
s
m
+
b
m
−
1
s
m
−
1
+
⋯
+
b
1
s
+
b
0
G_B(s)={G(s)\over 1+G(s)H(s)}={(s-p_1)(s-p_2)\dots(s-p_n)\over 1+b_ms^m+b_{m-1}s^{m-1}+\dots+b_1s+b_0}
GB(s)=1+G(s)H(s)G(s)=1+bmsm+bm−1sm−1+⋯+b1s+b0(s−p1)(s−p2)…(s−pn)
如果我们定义:
F
(
s
)
=
1
+
G
(
s
)
H
(
s
)
F(s)=1+G(s)H(s)
F(s)=1+G(s)H(s)
故:
F
(
s
)
=
1
+
b
m
s
m
+
b
m
−
1
s
m
−
1
+
⋯
+
b
1
s
+
b
0
(
s
−
p
1
)
(
s
−
p
2
)
…
(
s
−
p
n
)
=
k
(
s
−
z
1
)
(
s
−
z
2
)
…
(
s
−
z
n
)
(
s
−
p
1
)
(
s
−
p
2
)
…
(
s
−
p
n
)
\begin{aligned} F(s)&=1+{b_ms^m+b_{m-1}s^{m-1}+\dots+b_1s+b_0\over(s-p_1)(s-p_2)\dots(s-p_n)} \\&={k(s-z_1)(s-z_2)\dots(s-z_n)\over(s-p_1)(s-p_2)\dots(s-p_n)} \end{aligned}
F(s)=1+(s−p1)(s−p2)…(s−pn)bmsm+bm−1sm−1+⋯+b1s+b0=(s−p1)(s−p2)…(s−pn)k(s−z1)(s−z2)…(s−zn)
我们把
G
B
(
s
)
=
G
(
s
)
1
+
G
(
s
)
H
(
s
)
G_B(s)={G(s)\over 1+G(s)H(s)}
GB(s)=1+G(s)H(s)G(s)用
F
(
s
)
F(s)
F(s)代入,可得:
G
B
(
s
)
=
G
(
s
)
F
(
s
)
G_B(s)={G(s)\over F(s)}
GB(s)=F(s)G(s),即:
G
B
(
s
)
=
(
s
−
p
1
)
(
s
−
p
2
)
…
(
s
−
p
n
)
k
(
s
−
z
1
)
(
s
−
z
2
)
…
(
s
−
z
n
)
G_B(s)={(s-p_1)(s-p_2)\dots(s-p_n)\over k(s-z_1)(s-z_2)\dots(s-z_n)}
GB(s)=k(s−z1)(s−z2)…(s−zn)(s−p1)(s−p2)…(s−pn)
不难发现,
F
(
s
)
F(s)
F(s)的零点为闭环传递函数
G
B
(
s
)
G_B(s)
GB(s)的极点。
F
(
s
)
F(s)
F(s)的极点为开环传递函数
G
K
(
s
)
G_K(s)
GK(s)的极点。(注意两个都是极点哦)
5.4.2 Nyquist判据
我们讨论之前构造出来的辅助方程:
F
(
s
)
=
1
+
G
K
(
s
)
F(s)=1+G_K(s)
F(s)=1+GK(s)
只要
F
(
s
)
F(s)
F(s)在右半平面的零点个数为0,即可判断系统稳定。
根据幅角定理我们可以得到(我也不知道为什么就可以了,反正老师说可以那就可以吧):
如果
F
(
s
)
F(s)
F(s)的乃氏图曲线顺时针绕着原点的次数
N
=
F
(
s
)
∣
右
半
零
点
数
(
Z
)
−
F
(
s
)
∣
右
半
极
点
数
(
P
)
N=F(s)|_{右半零点数}(Z)-F(s)|_{右半极点数}(P)
N=F(s)∣右半零点数(Z)−F(s)∣右半极点数(P)。如果我们已知开环右极点数时,便可由
N
N
N判断闭环右极点数。
进一步我们可以推得quist判据的最终形式:
一个闭环反馈控制系统稳定的充要条件是其开环乃氏图逆时针包围
(
−
1
,
j
0
)
(-1,\mathrm{j}0)
(−1,j0)点的圈数等于其开环右极点的个数。
5.4.3 Nyquist判据应用于I、II型系统
我不记得这个东西考不考了。要是要考的话,我再补充。
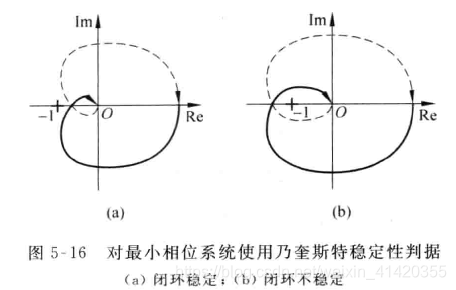
5.4.4 Nyquist判据应用于最小相位系统
想象一个点沿着乃奎斯特曲线,根据
ω
=
0
→
∞
\omega=0\to\infty
ω=0→∞向前进。如果
(
−
1
,
j
0
)
(-1,\mathrm{j}0)
(−1,j0)点是在前进方向的左边,则系统稳定。
可以理解一下下面这幅图:
5.5 运用乃奎斯特判据分析延时系统的稳定性
我感觉和之前的没什么区别。记一下结论,串联延时环节对稳定性是不利的。
5.6 由伯德图判断系统的稳定性
开环系统的乃奎斯特图和伯德图有如下的对应关系:
1.乃奎斯特图上单位圆对应于对数坐标图上的零分贝线;
A
(
ω
)
=
1
,
20
l
g
A
(
ω
)
=
0
A(\omega)=1, 20\mathrm{lg}A(\omega)=0
A(ω)=1,20lgA(ω)=0
2.乃奎斯特图上的负实轴对应于对数坐标图上的-180度相位线。
ϕ
(
ω
)
=
−
180
°
\phi(\omega)=-180\degree
ϕ(ω)=−180°
乃氏图频率特性曲线在
(
−
∞
,
−
1
)
(-\infty,-1)
(−∞,−1)上的正负穿越在对数坐标图上的对应关系:在对数坐标图上
L
(
ω
)
>
0
(
A
(
ω
)
>
1
)
L(\omega)>0(A(\omega)>1)
L(ω)>0(A(ω)>1)的范围内,当
ω
\omega
ω增加时,相频特性曲线从下向上穿过-180度相位线称为正穿越,因为相角值增加了。反之称为负穿越。如果
ω
=
0
\omega=0
ω=0时
ϕ
(
0
)
=
−
π
\phi(0)=-\pi
ϕ(0)=−π,乃氏图向第三象限去的时候,称为半次正穿越;向第二象限去,则为负穿越。
对于开环特征多项式没有右半平面的根的情况,只要在
L
(
ω
)
≥
0
d
B
L(\omega)\ge0dB
L(ω)≥0dB的所有角频率范围内,相角范围都大于
−
π
-\pi
−π线,那么闭环系统时稳定的。
当然,这并不能适应所有的情况。如果0型或I型系统在开环状态下的特征方程有
p
p
p个根在右半平面内,并设开环静态放大倍数大于0,在所有
L
(
ω
)
≥
0
L(\omega)\ge0
L(ω)≥0的频率范围内,相频特性曲线
ϕ
(
ω
)
\phi(\omega)
ϕ(ω)在
−
π
-\pi
−π线上的正负穿越之差为
p
/
2
p/2
p/2次,则闭环系统时稳定的。
如果是II型系统,在开环状态下的特征方程有
p
p
p个根在右半平面内,并设开环静态放大倍数大于0,在所有
L
(
ω
)
≥
0
L(\omega)\ge0
L(ω)≥0的频率范围内,相频特性曲线
ϕ
(
ω
)
\phi(\omega)
ϕ(ω)在
−
π
-\pi
−π线上的正负穿越之差为
(
p
+
1
)
/
2
(p+1)/2
(p+1)/2次,则闭环系统时稳定的。
5.7 控制系统的相对稳定性
运用劳斯判据
如果系统闭环特征根均在
s
s
s左半平面,且和虚轴有一段距离,则系统有一定的稳定裕量。
我们让虚轴左移
σ
\sigma
σ,零
z
=
s
+
σ
z=s+\sigma
z=s+σ,将
s
=
z
−
σ
s=z-\sigma
s=z−σ代入系统特征式,运用劳斯判据来进行判断。
运用Nyquist图
记住这幅图就好了:
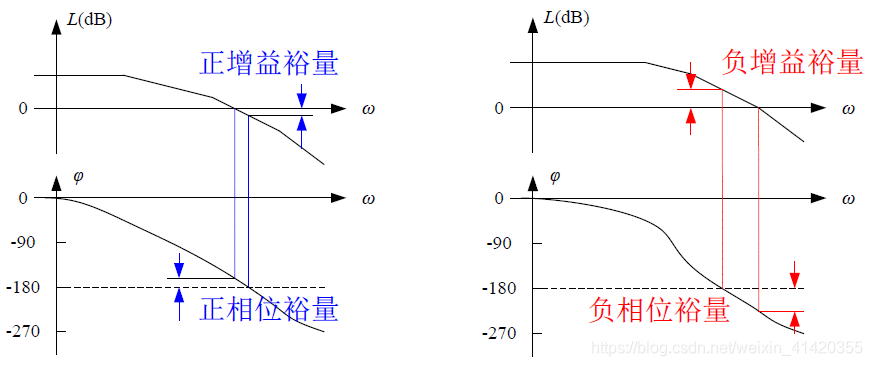
剪切频率:
∣
G
(
j
ω
c
)
∣
=
1
|G(\mathrm{j}\omega_c)|=1
∣G(jωc)∣=1
相位裕量:
γ
=
ϕ
(
ω
c
)
−
(
−
180
°
)
\gamma=\phi(\omega_c)-(-180\degree)
γ=ϕ(ωc)−(−180°)
增益(幅值)裕量:
K
g
=
∣
1
G
(
j
ω
−
π
)
∣
K_g=\left|1\over G(\mathrm{j}\omega_{-\pi})\right|
Kg=∣∣∣G(jω−π)1∣∣∣
https://zh.wikipedia.org/wiki/%E9%9F%A6%E8%BE%BE%E5%AE%9A%E7%90%86 ↩︎

















 1509
1509

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









