






 本文介绍了在Gazebo或jmavsim仿真环境中,QGC出现manualcontrollost导致飞行器乱飞的问题及其解决方案。一是禁用NAV_RCL_ACT以关闭遥控器丢失失效保护,二是将COM_RC_LOSS_T设置为最大值以处理可能的电脑卡顿问题。详情参见GitHubissue#9569。
本文介绍了在Gazebo或jmavsim仿真环境中,QGC出现manualcontrollost导致飞行器乱飞的问题及其解决方案。一是禁用NAV_RCL_ACT以关闭遥控器丢失失效保护,二是将COM_RC_LOSS_T设置为最大值以处理可能的电脑卡顿问题。详情参见GitHubissue#9569。
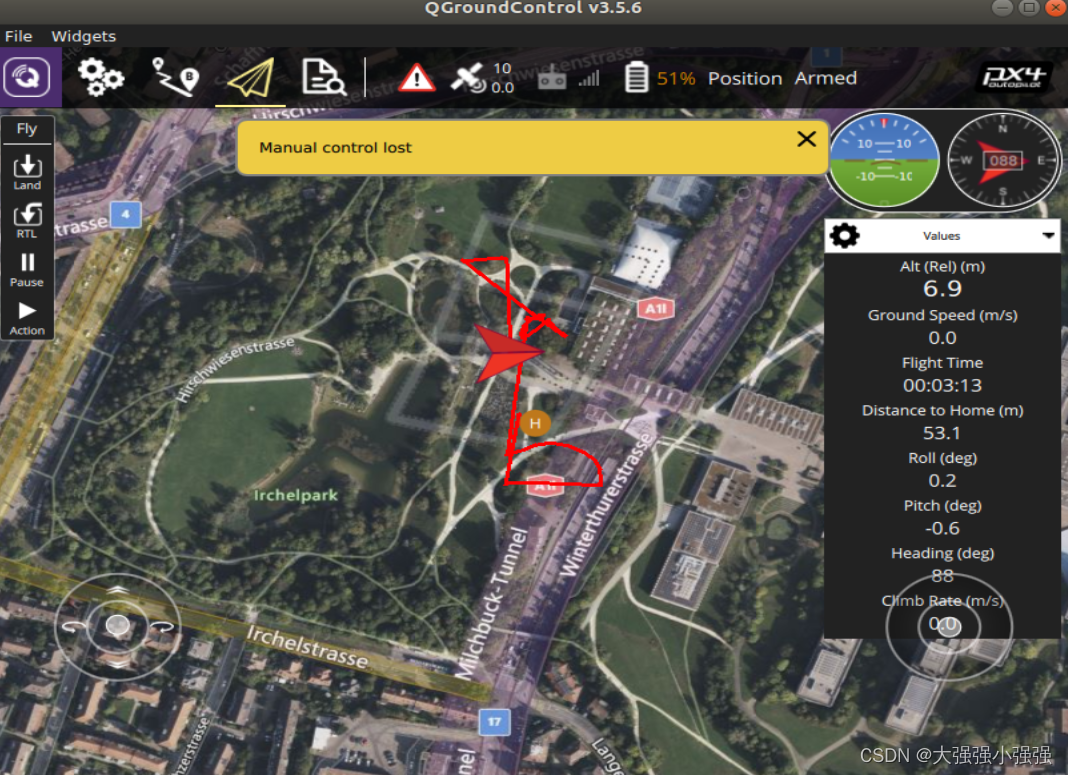
Gazebo或jmavsim里仿真都这样,突然QGC会出现 manual control lost,然后飞机会乱飞
解决方案1:
把 NAV_RCL_ACT 设置为 Disable,相当于关闭遥控器丢失失效保护,默认是Return返航,所以会乱飞。
解决方案2:
把 COM_RC_LOSS_T 改为最大值35,默认是0.5,实物建议改回0.5,可能是电脑卡的问题,导致遥控器信号丢失,因此直接设为最大值。
Gazebo或jmavsim里仿真都这样,突然QGC会出现 manual control lost,然后飞机会乱飞
解决方案1:
把 NAV_RCL_ACT 设置为 Disable,相当于关闭遥控器丢失失效保护,默认是Return返航,所以会乱飞。
解决方案2:
把 COM_RC_LOSS_T 改为最大值35,默认是0.5,实物建议改回0.5,可能是电脑卡的问题,导致遥控器信号丢失,因此直接设为最大值。
 2973
2973

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























