










QGC经常报的onboard controller lost的onboard是什么意思
这个onboard是不是和offboard相对应的,莫非是进入offboard的时候就会显示?还是说板载计算机没有发送期望数据的时候显示onboard controller lost?
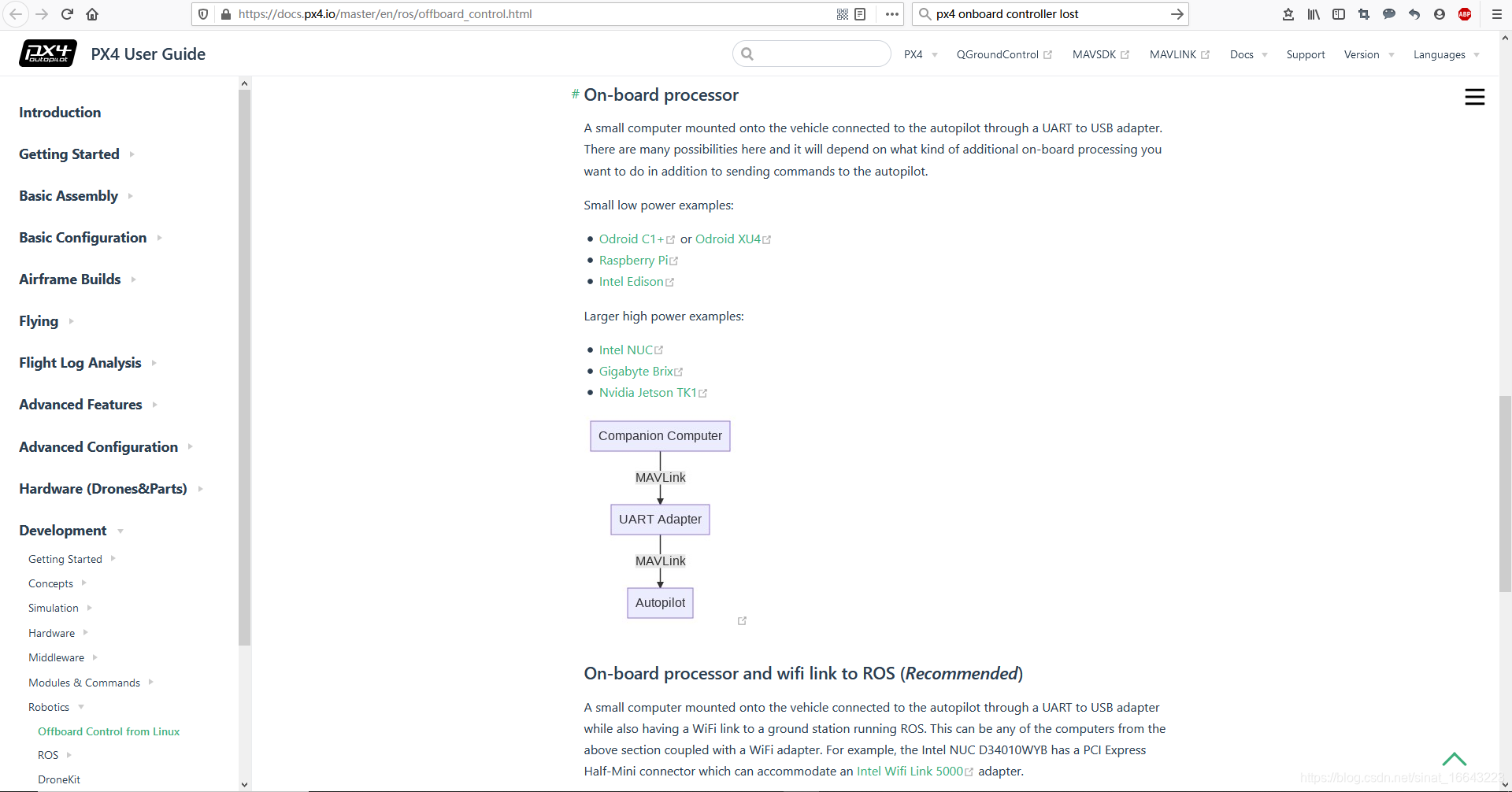
然后我在这里也看到了onboard
https://docs.px4.io/master/en/ros/offboard_control.html
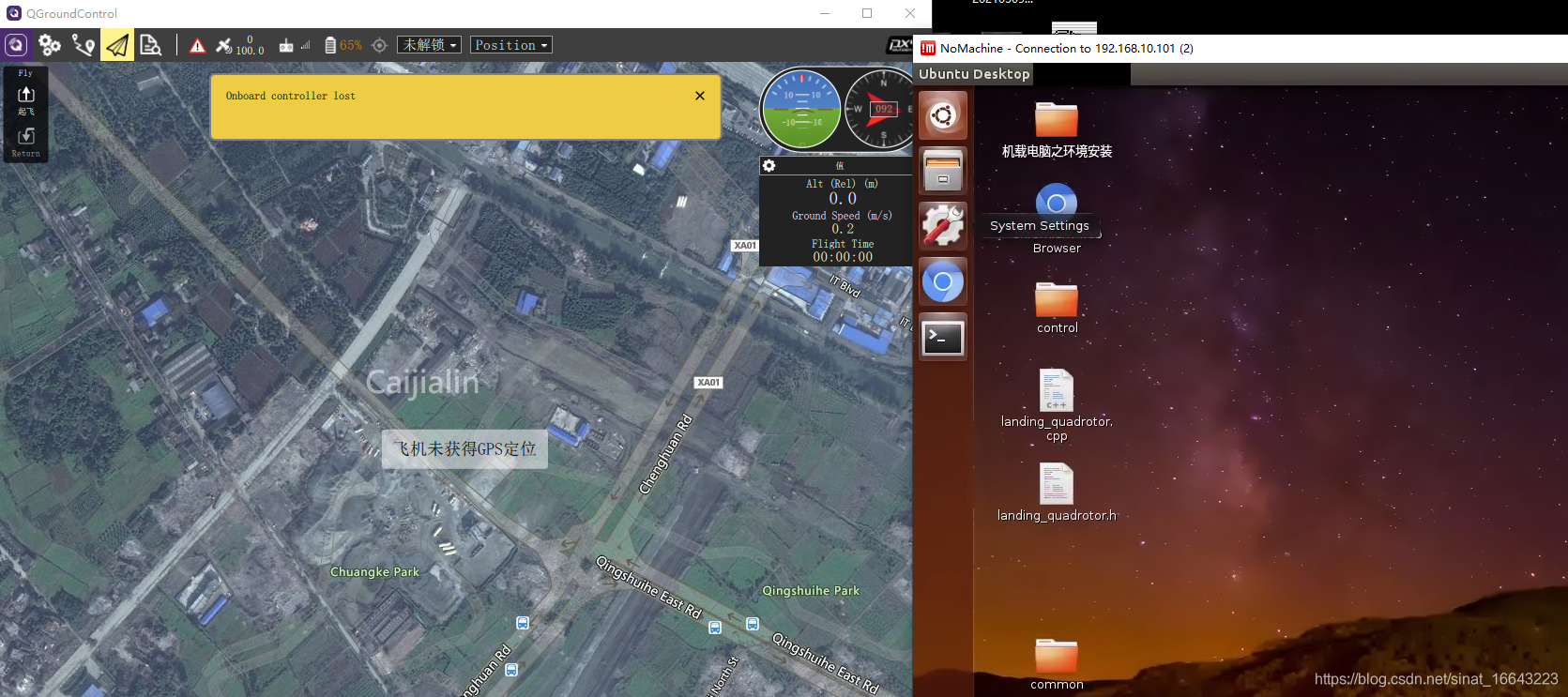
刚刚再实机试了下
就是关掉T265节点了,没有板载计算机发送的视觉位置数据了,就会显示这个。和遥控器切出offboard没有关系(遥控器切入或者切出offboard不会显示这个)。
我当时就是开了定点,没有发送指点指令,也就是没有期望位置数据的,然后关掉板载计算机所有终端,就显示这个onboard controller lost了,感觉应该和有没有发送期望位置没有关系,就是板载计算机没有发送视觉位置了,就显示这个了,onboard应该就指板载计算机,包括上面那个网页里面的noboard也指板载计算机。而offboard的board应该指飞控。
。


















 609
609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











