







一、动力模型
动力模型研究四旋翼机体系 x y z xyz xyz 轴上的力矩与四个电机输入油门的关系。这个过程中,假设电池电压不变,那么油门(即PWM波占空比)越大,则电调输入的等效电压越大,电机与螺旋桨转速越快,产生的升力越大;每个螺旋桨通过升力与反扭力转化为力矩与反扭矩,在 x y z xyz xyz 三个轴上合成新的力矩,以下做定量分析。
1.1 符号说明
| 变量 | 符号 | 单位 |
|---|---|---|
| 每个电机的油门 | σ 1 , σ 2 , σ 3 , σ 4 \sigma_1, \sigma_2, \sigma_3, \sigma_4 σ1,σ2,σ3,σ4 | 归一化 [ 0 , 1 ] [0,1] [0,1] |
| 每个螺旋桨产生的升力 | F 1 , F 2 , F 3 , F 4 F_1, F_2, F_3, F_4 F1,F2,F3,F4 | N \rm N N |
| 每个螺旋桨产生的诱导阻力 | f 1 , f 2 , f 3 , f 4 f_1, f_2, f_3, f_4 f1,f2,f3,f4 | N \rm N N |
| 每个螺旋桨升力产生的力矩 | M 1 , M 2 , M 3 , M 4 M_1, M_2, M_3, M_4 M1,M2,M3,M4 | N ⋅ m \rm N\cdot m N⋅m |
| 每个螺旋桨产生的反扭矩 | M r 1 , M r 3 , M r 3 , M r 4 M_{r1}, M_{r3}, M_{r3}, M_{r4} Mr1,Mr3,Mr3,Mr4 | N ⋅ m \rm N\cdot m N⋅m |
| x y z xyz xyz 轴上的合力矩 | τ x , τ y , τ z \tau_x, \tau_y, \tau_z τx,τy,τz | N ⋅ m \rm N\cdot m N⋅m |
| 合升力 | T T T | N \rm N N |
注:为简洁起见,以下省略 1 , 2 , 3 , 4 1,2,3,4 1,2,3,4 下标。
| 常量 | 符号 | 取值 | 含义 |
|---|---|---|---|
| 电机时间常数 | T m T_m Tm | 260 m s 260 \rm ms 260ms | 电机转速达到稳定转速63.2%所需时间 |
| 电机与四旋翼重心距离 | d d d | 0.225 m 0.225 \rm m 0.225m | 450四旋翼,机臂长度一半 225mm |
| 电机转速斜率 | C m C_m Cm | 706.1 r a d / s 706.1 \rm rad/s 706.1rad/s | 油门从增加1,电机转速增加量 |
| 电机转速截距 | ϖ m \varpi_m ϖm | 170.47 r a d / s 170.47 \rm rad/s 170.47rad/s | 油门为0时,电机转速 |
| 升力系数 | c T c_T cT | 1.201 × 1 0 − 5 N / ( r a d / s ) 2 1.201\times 10^{-5} \rm N/(rad/s)^2 1.201×10−5N/(rad/s)2 | 单个螺旋桨转速增加 1 r a d / s 1\rm rad/s 1rad/s,升力增加大小 |
| 反扭矩矩系数 | c M c_M cM | 1.574 × 1 0 − 7 N ⋅ m / ( r a d / s ) 2 1.574\times 10^{-7}\rm N \cdot m / (rad/s)^2 1.574×10−7N⋅m/(rad/s)2 | 单个螺旋桨转速增加 1 r a d / s 1\rm rad/s 1rad/s,扭矩增加大小 |
1.2 电机模型
1.2.1 原理
给电机的油门越大,电机与螺旋桨转速(以下简称电机转速)越快,油门与电机稳态转速之间接近线性关系。但是给电机一个油门之后,电机并不能立即达到对应的转速,可以把电机近似为一阶系统
T m d ϖ ( t ) d t + ϖ ( t ) = C m σ ( t ) + ϖ m (1.1) T_m \frac {\mathrm{d}\varpi(t)}{\mathrm{d}t} + \varpi(t) = C_{m} \sigma(t) + \varpi_{m} \tag{1.1} Tmdtdϖ(t)+ϖ(t)=Cmσ(t)+ϖm(1.1)
其中, C m C_m Cm为电机转速斜率,定义为油门从增加1,电机转速增加量; ϖ m \varpi_m ϖm 为电机转速截距,定义为油门为0时,电机的转速; C m σ ( t ) + ϖ m C_{m} \sigma(t) + \varpi_{m} Cmσ(t)+ϖm 代表电机的稳定转速,与油门线性相关。
为方便理解,式(1.1) 可转化为
ϖ ˙ ( t ) = d ϖ ( t ) d t = 1 T m ( C m σ ( t ) + ϖ m − ϖ ( t ) ) \dot \varpi(t) = \frac {\mathrm{d}\varpi(t)}{\mathrm{d}t} = \frac{1}{T_m} (C_{m} \sigma(t) + \varpi_{m} - \varpi(t)) ϖ˙(t)=dtdϖ(t)=Tm1(Cmσ(t)+ϖm−ϖ(t))
可见,随着电机转速 ϖ ( t ) \varpi(t) ϖ(t) 的增加,电机转速增量 ϖ ˙ ( t ) \dot \varpi(t) ϖ˙(t) 逐渐减小,电机转速逐渐达到给定转速。这个过程中,如果电机时间常数 T m T_m Tm 越大,则每次转速的增量越小,达到稳定转速的时间越长。
1.2.2 仿真
假设四个电机的输入油门分别时 0.7 , 0.6 , 0.5 , 0.4 0.7, 0.6, 0.5, 0.4 0.7,0.6,0.5,0.4,观察 2 s 2\rm s 2s 内四个电机转速变化。
%% 模型测试
global dt Tm Cm varpim
dt = 1e-3; % 仿真时间步长
Cm = 706.01; % 油门增大1,电机转速变化(RPM)
varpim = 170.47; % 零占空比时电机转速(RPM)
Tm = 0.260; % 电机时间常数
N = 2000;
t = 0:dt:dt*(N-1);
sigma = [0.7; 0.6; 0.5; 0.4];
varpi = zeros(N, 4);
k=1;
for tt=0:dt:(N-2)*dt
k = k+1;
% 动力单元模型
varpi(k, 1) = motor(sigma(1), varpi(k-1, 1)); % 电机1转速
varpi(k, 2) = motor(sigma(2), varpi(k-1, 2)); % 电机2转速
varpi(k, 3) = motor(sigma(3), varpi(k-1, 3)); % 电机3转速
varpi(k, 4) = motor(sigma(4), varpi(k-1, 4)); % 电机4转速
end
figure(1);plot(t, varpi(:,1), 'LineWidth', 1.5); hold on
plot(t, varpi(:,2), 'LineWidth', 1.5);
plot(t, varpi(:,3), 'LineWidth', 1.5);
plot(t, varpi(:,4), 'LineWidth', 1.5); hold off
legend(['\sigma_1=' num2str(sigma(1))], ['\sigma_2=' num2str(sigma(2))],['\sigma_3=' num2str(sigma(3))],['\sigma_4=' num2str(sigma(4))]);
xlabel('时间 t (s)');ylabel('转速 \varpi (rad/s)');title('电机模型测试'); grid on; grid minor
%% 电机模型
% 输入:油门大小 sigma(0-1)
% 电机上一时刻的转速(rad/s)
% 输出:此时刻电机转速(rad/s)
function varpi = motor(sigma, varpi_)
global dt Tm Cm varpim;
dvarpi = (Cm * sigma + varpim - varpi_) / Tm * dt;
varpi = varpi_ + dvarpi;
end
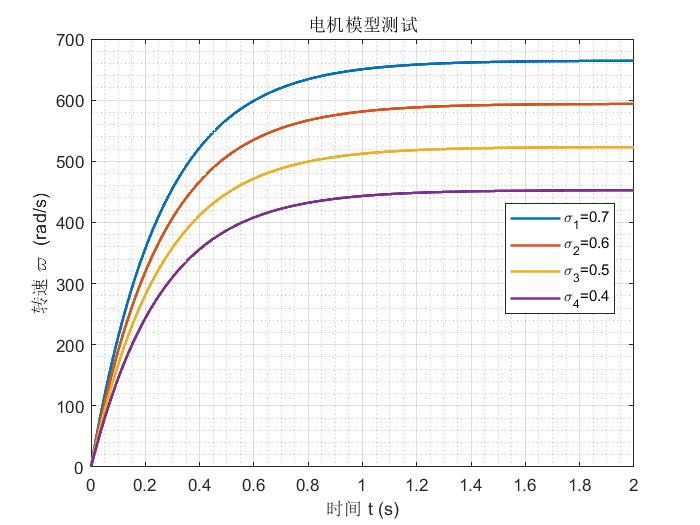
可见,油门越大,电机稳定转速越快,电机在 260 m s 260 \rm ms 260ms 达到稳定转速的63.2% 。
1.3 动力合成模型
1.3.1 合升力
螺旋桨转动产生升力,该升力和螺旋桨转速的平方成正比
f = c T ϖ 2 (1.2) f = c_T \varpi ^2 \tag{1.2} f=cTϖ2(1.2)
其中, c T c_T cT为升力系数。
四个螺旋桨产生的总升力大小为
T = c T ( ϖ 1 2 + ϖ 2 2 + ϖ 3 2 + ϖ 4 2 ) (1.3) T = c_T(\varpi_1^2 + \varpi_2^2 + \varpi_3^2 + \varpi_4^2) \tag{1.3} T=cT(ϖ12+ϖ22+ϖ32+ϖ42)(1.3)
1.3.2 x , y x,y x,y 轴力矩
螺旋桨产生的升力作用在四旋翼上,会导致机体转动,也即产生了力矩。力矩的定义为
M = d × F (1.4) M = d \times F \tag{1.4} M=d×F(1.4)
其中, d d d 为支点到力作用点的矢量, F F F 为力矢量; M M M为力矩,单位 N ⋅ m \rm N\cdot m N⋅m,其大小为 ∣ d ∣ ⋅ ∣ F ∣ ⋅ sin θ |d|\cdot |F| \cdot \sin\theta ∣d∣⋅∣F∣⋅sinθ,方向服从右手法则垂直于 d d d 与 F F F 所在的平面。
如下图所示, O O O为四旋翼重心, F 1 F_1 F1 为1号螺旋桨产生的升力,垂直纸面向外,容易得出力矩
M 1 = d × F 1 (1.5) M_1 = d\times F_1 \tag{1.5} M1=d×F1(1.5)
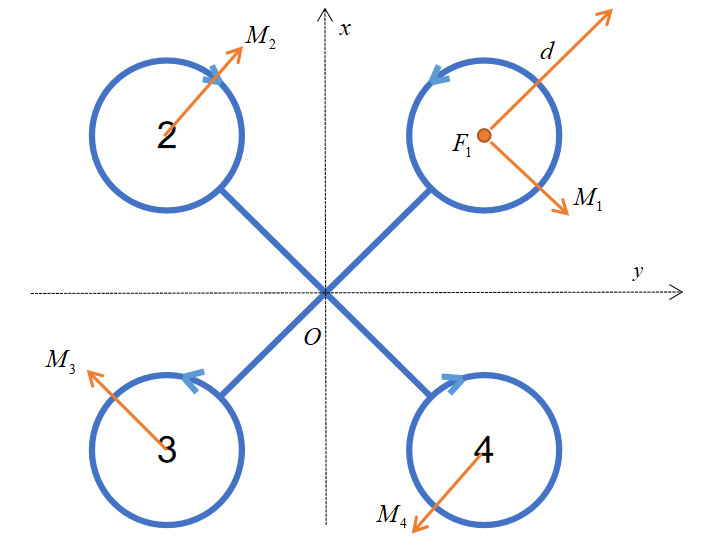
M 1 M_1 M1 在机体系 x , y x,y x,y 轴上的分量分别为
M 1 x = − 2 2 d F 1 = − 2 2 d c T ϖ 1 2 (1.6) M_{1x} = -\frac{\sqrt {2}}{2} dF_1 =-\frac{\sqrt {2}}{2} d c_T \varpi_1^2 \tag{1.6} M1x=−22dF1=−22dcTϖ12(1.6)
M 1 y = 2 2 d F 1 = 2 2 d c T ϖ 1 2 (1.7) M_{1y} = \frac{\sqrt {2}}{2} dF_1 =\frac{\sqrt {2}}{2} d c_T \varpi_1^2 \tag{1.7} M1y=22dF1=22dcTϖ12(1.7)
规定:刚体绕轴转动,力矩为正,刚体绕轴逆时针转动,力矩为负,刚体绕轴为顺时针转动(将坐标系箭头朝向自己,判断顺逆时针)。
1号螺旋桨产生力矩在 x x x 轴上分量为负,导致机体绕 x x x 轴逆时针转动,也即滚转角减小;在 y y y 轴上分量为正,机体系绕 y y y 逆时针转动,俯仰角增大。事实上,1号螺旋桨拉力很大将导致机体右前方升高,即俯仰角增大,滚转角减小,因此上面的规定是合理的。
同理可得其他三个螺旋桨产生的力矩 M 2 , M 3 , M 4 M_2, M_3, M_4 M2,M3,M4,通过力矩的矢量合成,易得 x , y x,y x,y 方向的合力矩为
τ x = 2 2 d c T ( − ϖ 1 2 + ϖ 2 2 + ϖ 3 2 − ϖ 4 2 ) (1.8) \tau_x = \frac{\sqrt {2}}{2} d c_T (-\varpi_1^2 + \varpi_2^2 + \varpi_3^2 - \varpi_4^2) \tag{1.8} τx=22dcT(−ϖ12+ϖ22+ϖ32−ϖ42)(1.8)
τ y = 2 2 d c T ( ϖ 1 2 + ϖ 2 2 − ϖ 3 2 − ϖ 4 2 ) (1.9) \tau_y = \frac{\sqrt {2}}{2} d c_T (\varpi_1^2 + \varpi_2^2 - \varpi_3^2 - \varpi_4^2) \tag{1.9} τy=22dcT(ϖ12+ϖ22−ϖ32−ϖ42)(1.9)
1.3.3 z z z轴力矩
螺旋桨在转动的时候,迅速冲撞着螺旋桨平面内的空气。根据牛顿第三定律,空气也会给螺旋桨一个反方向的阻力。如下图所示,俯视逆时针转动的1号螺旋桨,螺旋桨转动方向为 v v v,将受到空气的阻力 f 1 f_1 f1,产生力矩 M r 1 M_{r1} Mr1
M r 1 = r × f 1 (1.10) M_{r1} = r \times f_1 \tag{1.10} Mr1=r×f1(1.10)
其中,螺旋桨各点所受空气阻力并不相等, f 1 f_1 f1 为等效空气阻力, r r r 为螺旋桨长度的一半。
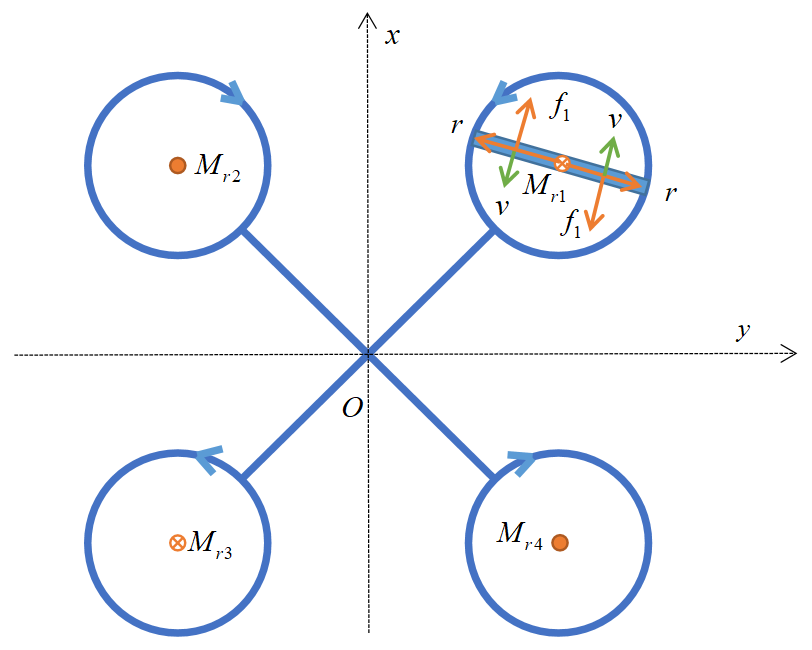
由于该力矩使得无人机转动,是反作用力效果,故称该力矩为反扭矩,该空气阻力称为反扭力。根据右手螺旋定则容易得出,叉乘后的方向垂直纸面向内,也即 z z z 轴分量为正,这将导致四旋翼逆时针转动(注意将 z z z 轴箭头朝向自己),俯视而看,四旋翼将顺时针转动。
同理, M r 3 M_{r3} Mr3 也将导致四旋翼顺时针转动(俯视),偏航角增大;而 M r 2 , M r 4 M_{r2}, M_{r4} Mr2,Mr4 将导致四旋翼逆时针转动(俯视),偏航角减小。
以上说明反扭矩的来源及对四旋翼偏航角的影响,但根据式(1.10) 很难计算的反扭矩,因为平均的反扭力 f 1 f_1 f1 难以得出,因此,采用实验方式得出反扭矩。实验表明,反扭矩也和螺旋桨转速的平方成正比
M r = c M ϖ 2 (1.11) M_{r} = c_M \varpi^2 \tag{1.11} Mr=cMϖ2(1.11)
其中, c M c_M cM 称为反扭矩系数,代表单个螺旋桨转速增加 1 r a d / s 1\rm rad/s 1rad/s,反扭矩增加的大小。
因此,四个螺旋桨产生的反扭矩之和为
τ z = c M ( ϖ 1 2 − ϖ 2 2 + ϖ 3 2 − ϖ 4 2 ) (1.12) \tau_z = c_M (\varpi_1^2 - \varpi_2^2 + \varpi_3^2 - \varpi_4^2) \tag{1.12} τz=cM(ϖ12−ϖ22+ϖ32−ϖ42)(1.12)
1.3.4 模型小结与仿真
综上,得到完整的动力合成模型如下
T = c T ( ϖ 1 2 + ϖ 2 2 + ϖ 3 2 + ϖ 4 2 ) τ x = 2 2 d c T ( − ϖ 1 2 + ϖ 2 2 + ϖ 3 2 − ϖ 4 2 ) τ y = 2 2 d c T ( ϖ 1 2 + ϖ 2 2 − ϖ 3 2 − ϖ 4 2 ) τ z = c M ( ϖ 1 2 − ϖ 2 2 + ϖ 3 2 − ϖ 4 2 ) \begin{aligned} &T = c_T(\varpi_1^2 + \varpi_2^2 + \varpi_3^2 + \varpi_4^2) \\ &\tau_x = \frac{\sqrt {2}}{2} d c_T (-\varpi_1^2 + \varpi_2^2 + \varpi_3^2 - \varpi_4^2) \\ &\tau_y = \frac{\sqrt {2}}{2} d c_T (\varpi_1^2 + \varpi_2^2 - \varpi_3^2 - \varpi_4^2) \\ &\tau_z = c_M (\varpi_1^2 - \varpi_2^2 + \varpi_3^2 - \varpi_4^2) \\ \end{aligned} T=cT(ϖ12+ϖ22+ϖ32+ϖ42)τx=22dcT(−ϖ12+ϖ22+ϖ32−ϖ42)τy=22dcT(ϖ12+ϖ22−ϖ32−ϖ42)τz=cM(ϖ12−ϖ22+ϖ32−ϖ42)
假设四个电机的输入油门分别时 0.7 , 0.6 , 0.5 , 0.4 0.7, 0.6, 0.5, 0.4 0.7,0.6,0.5,0.4,计算 2 s 2\rm s 2s 内四个螺旋桨产生的合升力及力矩大小。
%% 模型测试
global dt Tm Cm varpim d cT cM
dt = 1e-3; % 仿真时间步长
Cm = 706.01; % 油门增大1,电机转速变化(RPM)
varpim = 170.47; % 零占空比时电机转速(RPM)
Tm = 0.260; % 电机时间常数
d = 0.225; % 450mm/2
cT = 1.201e-5; % 升力系数
cM = 1.574e-7; % 反扭力系数
N = 2000;
t = 0:dt:dt*(N-1);
sigma = [0.7; 0.6; 0.5; 0.4];
varpi = zeros(N, 4);
T = zeros(N, 1);
tau = zeros(N, 3);
k=1;
for tt=0:dt:(N-2)*dt
k = k+1;
% 电机模型
varpi(k, 1) = motor(sigma(1), varpi(k-1, 1)); % 电机1转速
varpi(k, 2) = motor(sigma(2), varpi(k-1, 2)); % 电机2转速
varpi(k, 3) = motor(sigma(3), varpi(k-1, 3)); % 电机3转速
varpi(k, 4) = motor(sigma(4), varpi(k-1, 4)); % 电机4转速
[T(k), tau(k,:)] = power_mix(varpi(k, :));
end
figure(1);subplot(211); plot(t, T, 'linewidth', 1.5); title('动力合成模型');ylabel('升力 (N)');
subplot(212);plot(t, tau(:,1), 'linewidth', 1.5);hold on
plot(t, tau(:,2),'linewidth', 1.5);plot(t, tau(:,3),'linewidth', 1.5);hold off
ylabel('力矩 (N\cdotm)');xlabel('时间 (t)'); legend('\tau_x', '\tau_y', '\tau_z');
%% 电机模型
% 输入:油门大小 sigma(0-1)
% 电机上一时刻的转速(rad/s)
% 输出:此时刻电机转速(rad/s)
function varpi = motor(sigma, varpi_)
global dt Tm Cm varpim;
dvarpi = (Cm * sigma + varpim - varpi_) / Tm * dt;
varpi = varpi_ + dvarpi;
end
%% 动力合成模型
% 输入:四个电机转速
% 输出:合升力与三轴力矩
function [T, tau] = power_mix(varpi)
global cT cM d;
T = cT * sum(varpi.^2);
tau(1) = sqrt(2)/2 * d * cT * (-varpi(1)^2 + varpi(2)^2 + varpi(3)^2 - varpi(4)^2);
tau(2) = sqrt(2)/2 * d * cT * ( varpi(1)^2 + varpi(2)^2 - varpi(3)^2 - varpi(4)^2);
tau(3) = cM * (varpi(1)^2 - varpi(2)^2 + varpi(3)^2 - varpi(4)^2);
end
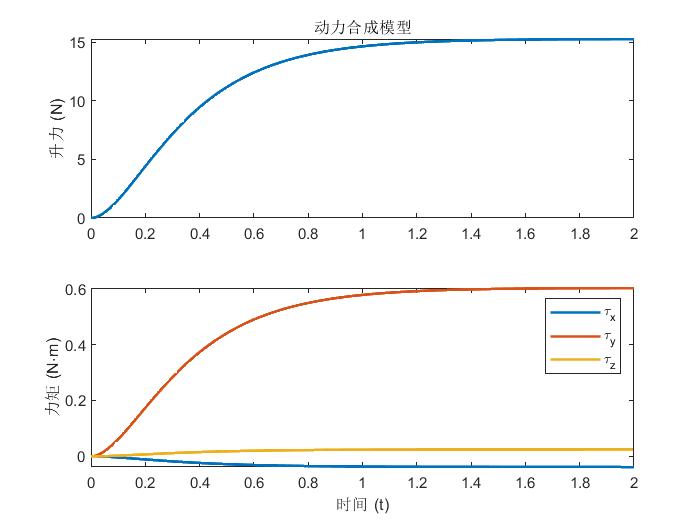
可见,产生了大约1.5kg 的拉力,一般450四旋翼空载质量也大约1.5kg,产生这样的拉力是合理的。绕 y y y 轴的力矩很大,并且是正数,说明这会使得无人机绕 y y y 逆时针运动,俯仰角增大。实际上,由于1号2号电机油门很大,相应的螺旋桨也会产生很大拉力,是的无人机俯仰角增大,与仿真结果一致。同理可分析绕 x x x 轴力矩较小,且会让滚转角稍微变小。同时,由于反扭矩系数远小于升力系数,绕 z z z 的力矩会比绕 x , y x,y x,y 的力矩小一到两个数量级。这说明相比于改变四旋翼俯仰角或滚转角,改变无人机偏航角更为困难,需要电机油门变化量更大,在设计控制系统时应注意。
1.4 动力模型小结
动力模型假设了电池电压不变,建立了四旋翼机体系下升力与力矩 与 四个电机油门的关系。完整模型如下
T m ϖ ˙ 1 ( t ) + ϖ 1 ( t ) = C m σ 1 ( t ) + ϖ m T m ϖ ˙ 2 ( t ) + ϖ 2 ( t ) = C m σ 2 ( t ) + ϖ m T m ϖ ˙ 3 ( t ) + ϖ 3 ( t ) = C m σ 3 ( t ) + ϖ m T m ϖ ˙ 4 ( t ) + ϖ 4 ( t ) = C m σ 4 ( t ) + ϖ m T = c T ( ϖ 1 2 + ϖ 2 2 + ϖ 3 2 + ϖ 4 2 ) τ x = 2 / 2 d c T ( − ϖ 1 2 + ϖ 2 2 + ϖ 3 2 − ϖ 4 2 ) τ y = 2 / 2 d c T ( ϖ 1 2 + ϖ 2 2 − ϖ 3 2 − ϖ 4 2 ) τ z = c M ( ϖ 1 2 − ϖ 2 2 + ϖ 3 2 − ϖ 4 2 ) \begin{aligned} &T_m \dot\varpi_1(t) + \varpi_1(t) = C_{m} \sigma_1(t) + \varpi_{m} \\ &T_m \dot\varpi_2(t) + \varpi_2(t) = C_{m} \sigma_2(t) + \varpi_{m} \\ &T_m \dot\varpi_3(t) + \varpi_3(t) = C_{m} \sigma_3(t) + \varpi_{m} \\ &T_m \dot\varpi_4(t) + \varpi_4(t) = C_{m} \sigma_4(t) + \varpi_{m} \\ &T = c_T(\varpi_1^2 + \varpi_2^2 + \varpi_3^2 + \varpi_4^2) \\ &\tau_x = \sqrt 2/2 d c_T (-\varpi_1^2 + \varpi_2^2 + \varpi_3^2 - \varpi_4^2) \\ &\tau_y = \sqrt 2/2 d c_T (\varpi_1^2 + \varpi_2^2 - \varpi_3^2 - \varpi_4^2) \\ &\tau_z = c_M (\varpi_1^2 - \varpi_2^2 + \varpi_3^2 - \varpi_4^2) \\ \end{aligned} Tmϖ˙1(t)+ϖ1(t)=Cmσ1(t)+ϖmTmϖ˙2(t)+ϖ2(t)=Cmσ2(t)+ϖmTmϖ˙3(t)+ϖ3(t)=Cmσ3(t)+ϖmTmϖ˙4(t)+ϖ4(t)=Cmσ4(t)+ϖmT=cT(ϖ12+ϖ22+ϖ32+ϖ42)τx=2/2dcT(−ϖ12+ϖ22+ϖ32−ϖ42)τy=2/2dcT(ϖ12+ϖ22−ϖ32−ϖ42)τz=cM(ϖ12−ϖ22+ϖ32−ϖ42)
专门针对四旋翼建模与控制出了一期教程哦,欢迎购买支持,课程链接 火力教育 四旋翼建模与控制


















 216
216

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











