









1 Package概览
名称:laserscan_kinect
URL:http://wiki.ros.org/laserscan_kinect
主要完成了将深度图像转换为LaserScan的激光数据的工作。在数据图中可见效果稳定:
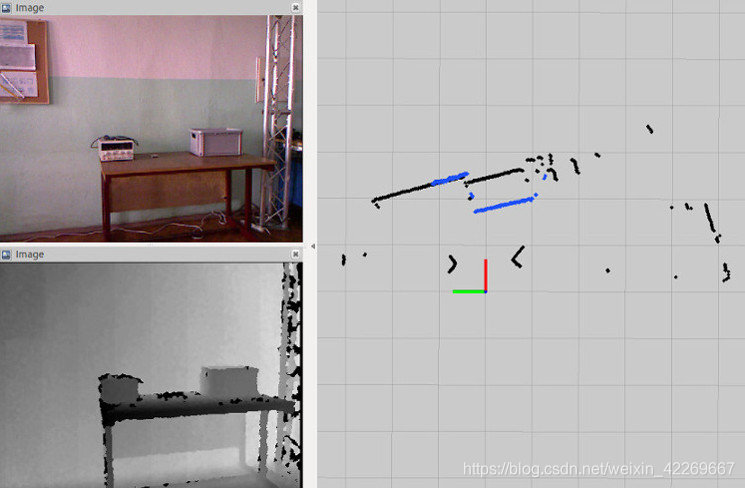
同时,该Package也进行了地面和顶部数据的滤除,并且对传感器位置进行了补偿。
2 使用方法
是Ros经典的使用方法:通过launch文件进行调用,参数通过Yaml文件进行设置。
输入节点是深度图像的两个信息:
image (sensor_msgs/Image)
camera_info (sensor_msgs/CameraInfo)
输出是激光扫描数据:
/scan (sensor_msgs/LaserScan)
/debug_image (sensor_msgs/Image)
需要进行调试,调试会给定在深度图像中的调试范围:

具体的其他参数可以在上面的链接中看到定义,其中可以对地面滤除,补偿位置等进行设置。
3 效果


上图即为水杯的深度图转激光点数据的结果,可以看出效果还是可以的,具体视野局限于深度传感器。

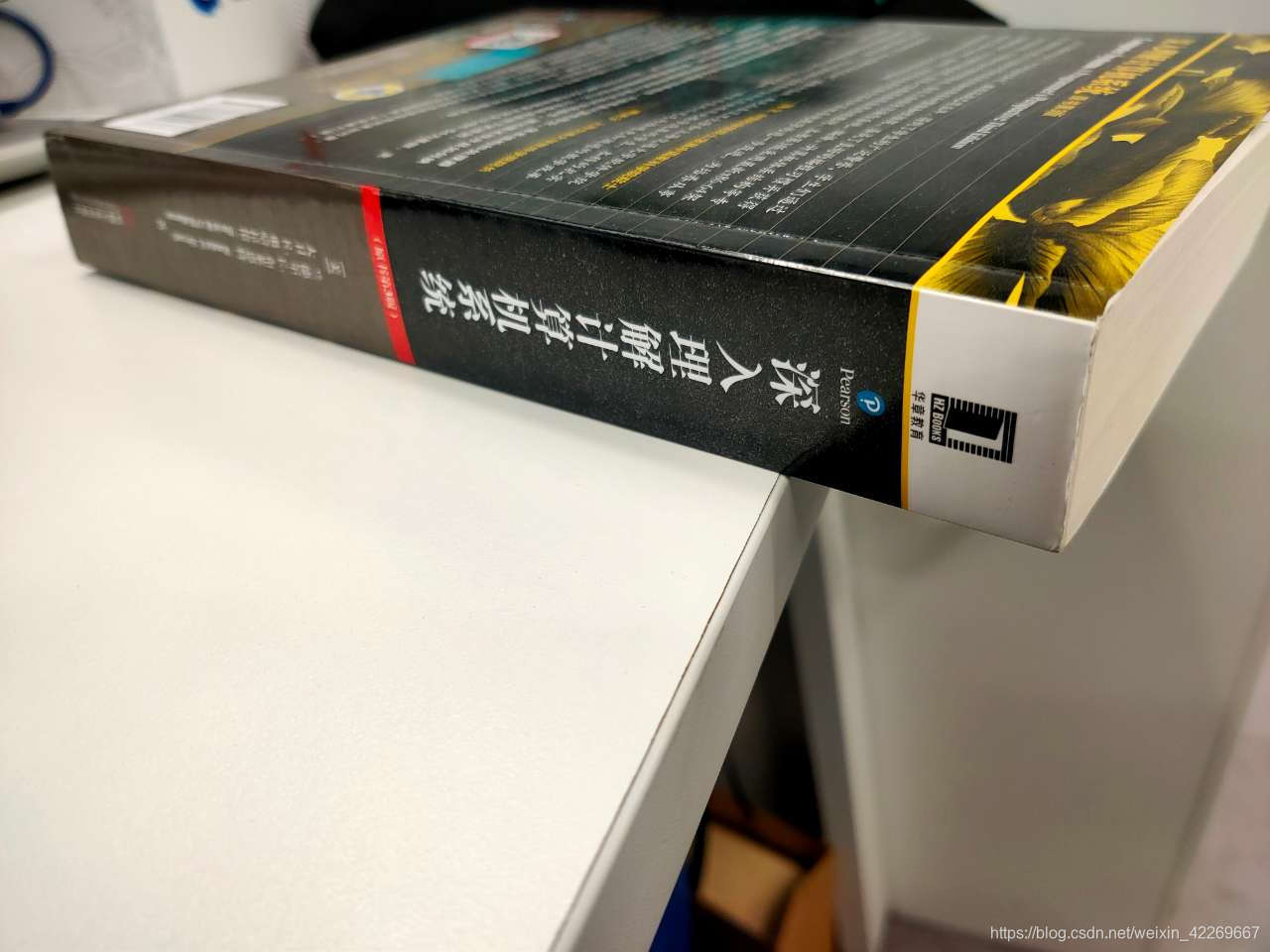
上图为书脊的扫描结果图。
如果有使用经验的伙伴可以将你的使用感受发在下面评论区,欢迎大家一起讨论。















 4487
4487











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









