







文章目录
参考资料
- 胡寿松《自动控制原理》第6版
- 刘豹《现代控制理论》第3版
- 哈工大控制学科803考研资料
1. 线性系统的状态空间描述
1.1 状态空间概念
- 状态: 反映系统运动状况, 并可用以确定系统末来行为的信息集合。
- 状态变量: 确定系统状态的一组独立 (数目最少) 变量, 它对于确定系统的运动状态是必 需的, 也是充分的。
- 状态向量:以状态变量为元素构成的向量。
- 状态空间: 以状态变量为坐标所张成的空间。系统某时刻的状态可用状态空间上的点来表 示。
- 状态方程: 状态变量的一阶导数与状态变量、输入变量之间的数学关系, 一般是关于系统 的一阶微分(或差分)方程组。
- 输出方程: 输出变量与状态变量、输入变量之间的数学关系。
- 状态方程与输出方程合称为状态空间描述或状态空间表达式。线性定常系统状态空间表达式一般用矩阵形式表示为: { x ˙ = A x + B u y = C x + D u \quad\left\{\begin{array}{l}\dot{x}=A x+B u \\ y=C x+D u\end{array}\right. {x˙=Ax+Buy=Cx+Du
1.2 状态空间表达式的线性变换及规范化
系统状态空间表达式可由系统微分方程、结构图、传递函数等其他形式的数学模型导出。
描述某一系统的状态变量个数 (维数) 是确定的, 但状态变量的选择并不唯一。某一状态向量经任意满秩线性变换后, 仍可作为状态向量来描述系统。状态变量选择不同, 状态空间表达式形式也不一样。利用线性变换的目的在于使系统矩阵 A \boldsymbol{A} A 规范化, 以便于揭示系统特性, 利于分析计算。满秩线性变换不改变系统的固有特性。
根据矩阵 A \boldsymbol{A} A 的特征根及相应的独立特征向量情况, 可将矩阵 A \boldsymbol{A} A 化为 3 种规范形式: 对角形、 约当形和模式矩阵。
2. 状态转移矩阵 Φ ( t ) \Phi(t) Φ(t) 与状态方程的解
2.1 状态转移矩阵的性质
- Φ ( 0 ) = I \Phi(0)=\boldsymbol{I} Φ(0)=I
- Φ ˙ ( t ) = A Φ ( t ) = Φ ( t ) A \dot{\Phi}(t)=A \Phi(t)=\Phi(t) \boldsymbol{A} Φ˙(t)=AΦ(t)=Φ(t)A
- Φ ( t 1 + t 2 ) = Φ ( t 1 ) Φ ( ± t 2 ) = Φ ( ± t 2 ) Φ ( t 1 ) \boldsymbol{\Phi}\left(t_1+t_2\right)=\boldsymbol{\Phi}\left(t_1\right) \boldsymbol{\Phi}\left(\pm t_2\right)=\boldsymbol{\Phi}\left(\pm t_2\right) \boldsymbol{\Phi}\left(t_1\right) Φ(t1+t2)=Φ(t1)Φ(±t2)=Φ(±t2)Φ(t1)
- Φ − 1 ( t ) = Φ ( − t ) \Phi^{-1}(t)=\boldsymbol{\Phi}(-t) Φ−1(t)=Φ(−t)
- [ Φ ( t ) ] k = Φ ( k t ) [\Phi(t)]^k=\Phi(k t) [Φ(t)]k=Φ(kt)
- exp ( A t ) exp ( B t ) = exp [ ( A + B ) t ] ( A B = B A ) \exp (\boldsymbol{A} t) \exp (\boldsymbol{B} t)=\exp [(\boldsymbol{A}+\boldsymbol{B}) t] \quad(\boldsymbol{A B}=\boldsymbol{B} \boldsymbol{A}) exp(At)exp(Bt)=exp[(A+B)t](AB=BA)
- exp ( P − 1 A P t ) = P − 1 exp ( A t ) P ( P \exp \left(\boldsymbol{P}^{-1} \boldsymbol{A P} t\right)=\boldsymbol{P}^{-1} \exp (\boldsymbol{A t}) \boldsymbol{P} \quad(\boldsymbol{P} exp(P−1APt)=P−1exp(At)P(P 非奇异 ) ) )
2.2 求状态转移矩阵 Φ ( t ) \boldsymbol{\Phi ( t )} Φ(t) 的常用方法
- 拉氏变换法: Φ ( t ) = L − 1 [ ( s I − A ) − 1 ] \boldsymbol{\Phi}(t)=L^{-1}\left[(s \boldsymbol{I}-\boldsymbol{A})^{-1}\right] Φ(t)=L−1[(sI−A)−1] 。
- 级数展开法: e A t = I + A t + 1 2 A 2 t 2 + ⋯ + 1 k ! A k t k + ⋯ \mathrm{e}^{A t}=\boldsymbol{I}+\boldsymbol{A} t+\frac{1}{2} \boldsymbol{A}^2 t^2+\cdots+\frac{1}{k !} \boldsymbol{A}^k t^k+\cdots eAt=I+At+21A2t2+⋯+k!1Aktk+⋯ 。
- 齐次状态方程求解: x ( t ) = Φ ( t ) x ( 0 ) \boldsymbol{x}(t)=\boldsymbol{\Phi}(t) \boldsymbol{x}(0) x(t)=Φ(t)x(0) 。
- 非齐次状态方程式 { x ˙ = A x + B u y = C x + D u \left\{\begin{array}{l}\dot{\boldsymbol{x}}=\boldsymbol{A} \boldsymbol{x}+\boldsymbol{B u} \\ \boldsymbol{y}=\boldsymbol{C} \boldsymbol{x}+\boldsymbol{D} \boldsymbol{u}\end{array}\right. {x˙=Ax+Buy=Cx+Du 求解: x ( t ) = Φ ( t ) x ( 0 ) + ∫ 0 t Φ ( t − τ ) B u ( τ ) d τ \boldsymbol{x}(t)=\boldsymbol{\Phi}(t) \boldsymbol{x}(0)+\int_0^{\boldsymbol{t}} \boldsymbol{\Phi}(t-\tau) \boldsymbol{B} \boldsymbol{u}(\tau) \mathrm{d} \tau x(t)=Φ(t)x(0)+∫0tΦ(t−τ)Bu(τ)dτ 。
3. 传递函数矩阵及其实现
-
传递函数矩阵 G ( s ) \boldsymbol{G}(s) G(s) :输出向量拉氏变换式与输入向量拉氏变换式之间的传递关系。
G ( s ) = C ( s I − A ) − 1 B + D \boldsymbol{G}(s)=\boldsymbol{C}(s \boldsymbol{I}-\boldsymbol{A})^{-1} \boldsymbol{B}+\boldsymbol{D} G(s)=C(sI−A)−1B+D -
传递函数矩阵的实现:
已知传递函数矩阵 G ( s ) \boldsymbol{G}(s) G(s), 找一个系统 { A , B , C , D } \{\boldsymbol{A}, \boldsymbol{B}, \boldsymbol{C}, \boldsymbol{D}\} {A,B,C,D} 使上式成立, 则将 系统 { A , B , C , D } \{\boldsymbol{A}, \boldsymbol{B}, \boldsymbol{C}, \boldsymbol{D}\} {A,B,C,D} 称为 G ( s ) \boldsymbol{G}(s) G(s) 的一个实现。当系统阶数等于传递函数矩阵阶数时, 称该系统为 G ( s ) \boldsymbol{G}(s) G(s) 的最小实现。传递函数矩阵的实现并不唯一。实现的常用标准形式有能控标准型实现、能观测标准型实 现、对角形实现和约当形实现等。
4. 线性定常连续系统的离散化及其求解
对
{
x
˙
=
A
x
+
B
u
y
=
C
x
+
D
u
\left\{\begin{array}{l}\dot{x}=A x+B u \\ y=C x+D u\end{array}\right.
{x˙=Ax+Buy=Cx+Du 表示的线性定常数连续系统进行离散化, 导出的系统离散状态空间描述:
{
x
(
k
+
1
)
=
Φ
(
T
)
x
(
k
)
+
G
(
T
)
u
(
k
)
y
(
k
)
=
C
x
(
k
)
+
D
(
k
)
\left\{\begin{array}{l} \boldsymbol{x}(k+1)=\boldsymbol{\Phi}(T) \boldsymbol{x}(k)+\boldsymbol{G}(T) \boldsymbol{u}(k) \\ \boldsymbol{y}(k)=\boldsymbol{C} \boldsymbol{x}(k)+\boldsymbol{D}(k) \end{array}\right.
{x(k+1)=Φ(T)x(k)+G(T)u(k)y(k)=Cx(k)+D(k)
式中,
Φ
(
T
)
=
Φ
(
t
)
∣
t
=
T
,
G
(
T
)
=
∫
0
T
Φ
(
τ
)
B
d
τ
\boldsymbol{\Phi}(T)=\left.\boldsymbol{\Phi}(t)\right|_{t=T}, \boldsymbol{G}(T)=\int_0^T \boldsymbol{\Phi}(\tau) \boldsymbol{B} \mathrm{d} \tau
Φ(T)=Φ(t)∣t=T,G(T)=∫0TΦ(τ)Bdτ
离散状态方程式的解为:
x
(
k
)
=
Φ
k
(
T
)
x
(
0
)
+
∑
i
=
0
k
−
1
Φ
k
−
1
−
i
(
T
)
G
(
T
)
u
(
i
)
\boldsymbol{x}(k)=\boldsymbol{\Phi}^k(T) \boldsymbol{x}(0)+\sum_{i=0}^{k-1} \boldsymbol{\Phi}^{k-1-i}(T) \boldsymbol{G}(T) \boldsymbol{u}(i)
x(k)=Φk(T)x(0)+i=0∑k−1Φk−1−i(T)G(T)u(i)
5. 线性系统的能控性与能观测性
5.1 系统的 (状态) 能控性
设系统状态方程为 x ˙ = A x + B u \dot{\boldsymbol{x}}=\boldsymbol{A} \boldsymbol{x}+\boldsymbol{B u} x˙=Ax+Bu, 若在有限时间间隔 t ∈ [ t 0 , t f ] t \in\left[t_0, t_{\mathrm{f}}\right] t∈[t0,tf] 内存在无约束的分段连续控制 函数 u ( t ) \boldsymbol{u}(t) u(t), 能使系统从任意初始状态 x ( t 0 ) \boldsymbol{x}\left(t_0\right) x(t0) 转移到任意的终止状态 x ( t f ) \boldsymbol{x}\left(t_{\mathrm{f}}\right) x(tf), 则称系统是状态完全 能控的, 简称能控。
5.2 能控性判据
- rank [ B A B A 2 B ⋯ A n − 1 B ] = n \operatorname{rank}\left[\begin{array}{lllll}\boldsymbol{B} & \boldsymbol{A} \boldsymbol{B} & \boldsymbol{A}^2 \boldsymbol{B} & \cdots & \boldsymbol{A}^{n-1} \boldsymbol{B}\end{array}\right]=n rank[BABA2B⋯An−1B]=n 。
- 当
A
\boldsymbol{A}
A 为对角矩阵且特征根互异时, 输入矩阵
B
\boldsymbol{B}
B 中无全零行(当矩阵
A
\boldsymbol{A}
A 有相同特征根 时不适用。
当 A \boldsymbol{A} A 为约当矩阵且相同特征根分布在一个约当块内时, 输入矩阵中与约当块最后一行对应 的行中不全为零, 且输入矩阵中与相异特征根对应的行不全为零 (当相同特征根分布在两个或 两个以上约当块时不适用)。 - ( s I − A ) − 1 B (s \boldsymbol{I}-\boldsymbol{A})^{-1} \boldsymbol{B} (sI−A)−1B 的行向量线性无关。
- 单输入系统 { A , B } \{\boldsymbol{A}, \boldsymbol{B}\} {A,B} 为能控标准型。
- 单输入-单输出系统, 当由状态空间表达式导出的传递函数没有零、极点对消时, 系 统能控、能观测 (对多输入-多输出系统不适用)。
连续系统状态方程离散化后的能控性: 连续系统不能控, 离散化的系统一定不能控; 连续 系统能控, 离散化后的系统不一定能控 (与采样周期的选择有关)。
5.3 系统状态能观测性
已知输入 u ( t ) \boldsymbol{u}(t) u(t) 及有限时间间隔 t ∈ [ t 0 , t f ] t \in\left[t_0, t_{\mathrm{f}}\right] t∈[t0,tf] 内测量到的输出 y ( t ) \boldsymbol{y}(t) y(t), 若能唯一确定初始状态 x ( t 0 ) x\left(t_0\right) x(t0), 则称系统是完全能观测的, 简称能观测。
5.4 能观性判据
-
rank [ C T A T C T ⋯ ( A T ) n − 1 C T ] = n \operatorname{rank}\left[\boldsymbol{C}^{\mathrm{T}} \quad \boldsymbol{A}^{\mathrm{T}} \boldsymbol{C}^{\mathrm{T}} \quad \cdots \quad\left(\boldsymbol{A}^{\mathrm{T}}\right)^{n-1} \boldsymbol{C}^{\mathrm{T}}\right]=n rank[CTATCT⋯(AT)n−1CT]=n 。
-
当 A \boldsymbol{A} A 为对角矩阵且有相异特征值时, 输出矩阵无全零列 ( A \boldsymbol{A} A 阵有相同特征值时不适用)。 当 A \boldsymbol{A} A 为约当阵且相同特征值分布在一个约当块时, 输出矩阵中与约当块最前一列对应的列 不全为零, 输出矩阵中与相异特征值对应的列不全为零 (相同特征值分布在两个或更多个约当 块时不适用)。
-
C ( s I − A ) − 1 \boldsymbol{C}(s \boldsymbol{I}-\boldsymbol{A})^{-1} C(sI−A)−1 的列向量线性无关。
-
单输出系统 { A , C } \{\boldsymbol{A}, \boldsymbol{C}\} {A,C} 为能观测标准型。
连续系统离散化后的能观测性: 连续系统不能观测, 离散化后一定不能观测; 连续系统能观测, 离散化后不一定能观测(与采样周期的选择有关)。
对偶原理: 线性系统 S 1 { A , B , C } \mathrm{S}_1\{\boldsymbol{A}, \boldsymbol{B}, \boldsymbol{C}\} S1{A,B,C} 与 S 2 { A T , C T , B T } \mathrm{S}_2\left\{\boldsymbol{A}^{\mathrm{T}}, \boldsymbol{C}^{\mathrm{T}}, \boldsymbol{B}^{\mathrm{T}}\right\} S2{AT,CT,BT} 互为对偶系统。若系统 S 1 \mathrm{S}_1 S1 能控, 则 S 2 \mathrm{S}_2 S2 能观测; 若系统 S 1 \mathrm{S}_1 S1 能观测, 则 S 2 \mathrm{S}_2 S2 能控。
5.5 线性定常系统的规范分解
从能控性、能观测性出发, 状态变量可分解为能控能观测 x c o \boldsymbol{x}_{\mathrm{co}} xco 、能控不能观测 x c o ‾ \boldsymbol{x}_{\mathrm{c}\overline{o}} xco 、不能控 能观测 x c ‾ o \boldsymbol{x}_{\overline{\mathrm{c}} o} xco 和不能控不能观测 x c ‾ o ‾ \boldsymbol{x}_{\overline{\mathrm{c}} \overline{o}} xco 四类。以此对应将状态空间划分为四个子空间, 系统也对应分解为四个子系统, 这称为系统的规范分解。
6. 转化空间表达式的规范型
6.1 化 A \boldsymbol{A} A 阵为对角型
-
设 A \boldsymbol{A} A 阵为任意形式的方阵, 且有 n n n 个互异实数特征值 λ 1 , λ 2 , ⋯ , λ n \lambda_1, \lambda_2, \cdots, \lambda_n λ1,λ2,⋯,λn, 则可由非奇异线性变换化为对角阵:
Λ = P − 1 A P = [ λ 1 λ 2 ⋱ λ n ] \boldsymbol{\Lambda}=\boldsymbol{P}^{-1} \boldsymbol{A} \boldsymbol{P}=\left[\begin{array}{llll} \lambda_1 & & & \\ & \lambda_2 & & \\ & & \ddots & \\ & & & \lambda_n \end{array}\right] Λ=P−1AP=⎣ ⎡λ1λ2⋱λn⎦ ⎤
P \boldsymbol{P} P 阵由 A \boldsymbol{A} A 阵的实数特征向量 p i ( i = 1 , 2 , ⋯ , n ) \boldsymbol{p}_i(i=1,2, \cdots, n) pi(i=1,2,⋯,n) 组成: P = [ p 1 p 2 ⋯ p n ] \boldsymbol{P}=\left[\begin{array}{llll}\boldsymbol{p}_1 & \boldsymbol{p}_2 & \cdots & \boldsymbol{p}_n\end{array}\right] P=[p1p2⋯pn]特征向量满足: A p i = λ i p i ; i = 1 , 2 , ⋯ , n \boldsymbol{A \boldsymbol { p } _ { i }}=\lambda_i \boldsymbol{p}_i ; \quad i=1,2, \cdots, n Api=λipi;i=1,2,⋯,n
-
若 A \boldsymbol{A} A 阵为友矩阵, 且有 n n n 个互异实数特征值 λ 1 , λ 2 , ⋯ , λ n \lambda_1, \lambda_2, \cdots, \lambda_n λ1,λ2,⋯,λn, 则下列的范德蒙特矩阵 P \boldsymbol{P} P
可使 A \boldsymbol{A} A 对角化:
A = [ 0 1 0 ⋯ 0 0 0 1 ⋯ 0 ⋮ ⋮ ⋮ ⋮ 0 0 0 ⋯ 1 − a 0 − a 1 − a 2 ⋯ − a n − 1 ] , P = [ 1 1 ⋯ 1 λ 1 λ 2 ⋯ λ n λ 1 2 λ 2 2 ⋯ λ n 2 ⋮ ⋮ ⋮ λ 1 n − 1 λ 2 n − 1 ⋯ λ n n − 1 ] \boldsymbol{A}=\left[\begin{array}{ccccc}0 & 1 & 0 & \cdots & 0 \\ 0 & 0 & 1 & \cdots & 0 \\ \vdots & \vdots & \vdots & & \vdots \\ 0 & 0 & 0 & \cdots & 1 \\ -a_0 & -a_1 & -a_2 & \cdots & -a_{n-1}\end{array}\right], \boldsymbol{P}=\left[\begin{array}{cccc}1 & 1 & \cdots & 1 \\ \lambda_1 & \lambda_2 & \cdots & \lambda_n \\ \lambda_1^2 & \lambda_2^2 & \cdots & \lambda_n^2 \\ \vdots & \vdots & & \vdots \\ \lambda_1^{n-1} & \lambda_2^{n-1} & \cdots & \lambda_n^{n-1}\end{array}\right] A=⎣ ⎡00⋮0−a010⋮0−a101⋮0−a2⋯⋯⋯⋯00⋮1−an−1⎦ ⎤,P=⎣ ⎡1λ1λ12⋮λ1n−11λ2λ22⋮λ2n−1⋯⋯⋯⋯1λnλn2⋮λnn−1⎦ ⎤
6.2 化能控系统为能控标准型
能控标准型为:
[
x
˙
1
x
˙
2
⋮
x
˙
n
−
1
x
˙
n
]
=
[
0
1
0
⋯
0
0
0
1
⋯
0
⋮
⋮
⋮
⋮
0
0
0
⋯
1
−
a
0
−
a
1
−
a
2
⋯
−
a
n
−
1
]
[
x
1
x
2
⋮
x
n
−
1
x
n
]
+
[
0
0
⋮
0
1
]
u
\left[\begin{array}{c}\dot{x}_1 \\ \dot{x}_2 \\ \vdots \\ \dot{x}_{n-1} \\ \dot{x}_n\end{array}\right]=\left[\begin{array}{ccccc}0 & 1 & 0 & \cdots & 0 \\ 0 & 0 & 1 & \cdots & 0 \\ \vdots & \vdots & \vdots & & \vdots \\ 0 & 0 & 0 & \cdots & 1 \\ -a_0 & -a_1 & -a_2 & \cdots & -a_{n-1}\end{array}\right]\left[\begin{array}{c}x_1 \\ x_2 \\ \vdots \\ x_{n-1} \\ x_n\end{array}\right]+\left[\begin{array}{c}0 \\ 0 \\ \vdots \\ 0 \\ 1\end{array}\right] u
⎣
⎡x˙1x˙2⋮x˙n−1x˙n⎦
⎤=⎣
⎡00⋮0−a010⋮0−a101⋮0−a2⋯⋯⋯⋯00⋮1−an−1⎦
⎤⎣
⎡x1x2⋮xn−1xn⎦
⎤+⎣
⎡00⋮01⎦
⎤u
变换矩阵
P
−
1
\boldsymbol{P}^{-1}
P−1 的求法如下:
- 计算能控性矩阵 S = [ B A B A 2 B ⋯ A n − 1 B ] \boldsymbol{S}=\left[\begin{array}{lllll}\boldsymbol{B} & \boldsymbol{A B} & \boldsymbol{A}^2 \boldsymbol{B} & \cdots & \boldsymbol{A}^{n-1} \boldsymbol{B}\end{array}\right] S=[BABA2B⋯An−1B] 。
- 计算能控性矩阵的逆矩阵 S − 1 \boldsymbol{S}^{-1} S−1, 设一般形式为 S − 1 = [ S 11 S 12 ⋯ S 1 n S 21 S 22 ⋯ S 2 n ⋮ ⋮ ⋮ S n 1 S n 2 ⋯ S n n ] \boldsymbol{S}^{-1}=\left[\begin{array}{cccc}S_{11} & S_{12} & \cdots & S_{1 n} \\ S_{21} & S_{22} & \cdots & S_{2 n} \\ \vdots & \vdots & & \vdots \\ S_{n 1} & S_{n 2} & \cdots & S_{n n}\end{array}\right] S−1=⎣ ⎡S11S21⋮Sn1S12S22⋮Sn2⋯⋯⋯S1nS2n⋮Snn⎦ ⎤ 。
- 取出 S − 1 \boldsymbol{S}^{-1} S−1 的最后一行(即第 n n n 行)构成 p 1 \boldsymbol{p}_1 p1 行向量 p 1 = [ S n 1 S n 2 ⋯ S n n ] \boldsymbol{p}_1=\left[\begin{array}{llll}S_{n 1} & S_{n 2} & \cdots & S_{n n}\end{array}\right] p1=[Sn1Sn2⋯Snn]
- 构造 P \boldsymbol{P} P 阵 P = [ p 1 p 1 A ⋮ p 1 A n − 1 ] \boldsymbol{P}=\left[\begin{array}{c}\boldsymbol{p}_1 \\ \boldsymbol{p}_1 \boldsymbol{A} \\ \vdots \\ \boldsymbol{p}_1 \boldsymbol{A}^{n-1}\end{array}\right] P=⎣ ⎡p1p1A⋮p1An−1⎦ ⎤
- P − 1 \boldsymbol{P}^{-1} P−1 便是将非能控标准型系统化为能控标准型的变换矩阵。 运用对偶原理化能观测系统为能观测标准型。
7. 状态空间的分解
7.1 系统按能控性分解。
设不能控系统的状态空间方程为:
x
˙
=
A
x
+
B
u
,
y
=
C
x
\dot{\boldsymbol{x}}=\boldsymbol{A x}+\boldsymbol{B u}, \boldsymbol{y}=\boldsymbol{C x}
x˙=Ax+Bu,y=Cx
式中,
x
\boldsymbol{x}
x 为
n
n
n 维状态向量;
u
\boldsymbol{u}
u 为
p
p
p 维输出向量;
A
,
B
,
C
\boldsymbol{A}, \boldsymbol{B}, \boldsymbol{C}
A,B,C 为具有相应维数的矩阵。
若系统能控性矩阵的秩为
r
(
r
<
n
)
r(r<n)
r(r<n), 则可以从能控性矩阵中选出
r
r
r 个线性无关的列向量
s
1
\boldsymbol{s}_1
s1,
s
2
,
⋯
,
s
r
s_2, \cdots, s_r
s2,⋯,sr, 另外再任意选取尽可能简单的
n
−
r
n-r
n−r 个
n
n
n 维列向量
s
r
+
1
,
s
r
+
2
,
⋯
,
s
n
s_{r+1}, s_{r+2}, \cdots, s_n
sr+1,sr+2,⋯,sn, 使它们与
{
s
1
,
s
2
,
⋯
,
s
r
}
\left\{s_1, s_2, \cdots, s_r\right\}
{s1,s2,⋯,sr} 线性无关, 这样构造
P
−
1
\boldsymbol{P}^{-1}
P−1:
P
−
1
=
[
s
1
s
2
⋯
s
r
s
r
+
1
⋯
s
n
]
P^{-1}=\left[\begin{array}{lllllll}s_1 & s_2 & \cdots & s_r & s_{r+1} & \cdots & s_n\end{array}\right]
P−1=[s1s2⋯srsr+1⋯sn]
对上式进行非奇异线性变换:
[
x
˙
c
x
x
‾
]
=
P
A
P
−
1
[
x
c
x
c
‾
]
+
P
B
u
,
y
=
C
P
−
1
[
x
c
x
c
‾
]
\left[\begin{array}{c}\dot{x}_{\mathrm{c}} \\ \boldsymbol{x}_{\overline{\mathrm{x}}}\end{array}\right]=\boldsymbol{P A P}^{-1}\left[\begin{array}{l}\boldsymbol{x}_{\mathrm{c}} \\ \boldsymbol{x}_{\overline{\mathrm{c}}}\end{array}\right]+\boldsymbol{P B u}, \boldsymbol{y}=\boldsymbol{C P ^ { - 1 }}\left[\begin{array}{l}\boldsymbol{x}_{\mathrm{c}} \\ \boldsymbol{x}_{\overline{\mathrm{c}}}\end{array}\right]
[x˙cxx]=PAP−1[xcxc]+PBu,y=CP−1[xcxc]
式中,
x
c
\boldsymbol{x}_{\mathrm{c}}
xc 为
r
r
r 维能控状态子向量;
x
c
\boldsymbol{x}_{\mathrm{c}}
xc 为
n
−
r
n-r
n−r 维不能控状态子向量, 并且
P
A
P
−
1
=
[
A
‾
11
A
‾
12
0
A
‾
22
]
,
P
B
=
[
B
‾
1
0
]
,
C
P
−
1
=
[
C
‾
1
C
‾
2
]
\boldsymbol{P} \boldsymbol{A} \boldsymbol{P}^{-1}=\left[\begin{array}{cc} \overline{\boldsymbol{A}}_{11} & \overline{\boldsymbol{A}}_{12} \\ 0 & \overline{\boldsymbol{A}}_{22} \end{array}\right], \boldsymbol{P B}=\left[\begin{array}{c} \overline{\boldsymbol{B}}_1 \\ 0 \end{array}\right], \quad \boldsymbol{C P}{ }^{-1}=\left[\begin{array}{ll} \overline{\boldsymbol{C}}_1 & \overline{\boldsymbol{C}}_2 \end{array}\right]
PAP−1=[A110A12A22],PB=[B10],CP−1=[C1C2]
则能控子系统状态空间方程为:
x
˙
c
=
A
‾
11
x
c
+
A
‾
12
x
c
+
B
‾
1
u
,
y
1
=
C
‾
1
x
c
\dot{\boldsymbol{x}}_{\mathrm{c}}=\overline{\boldsymbol{A}}_{11} \boldsymbol{x}_{\mathrm{c}}+\overline{\boldsymbol{A}}_{12} \boldsymbol{x}_{\mathrm{c}}+\overline{\boldsymbol{B}}_1 \boldsymbol{u}, \quad \boldsymbol{y}_1=\overline{\boldsymbol{C}}_1 x_{\mathrm{c}}
x˙c=A11xc+A12xc+B1u,y1=C1xc
不能控子系统状态方程为:
x
˙
c
‾
=
A
ˉ
22
x
c
ˉ
,
y
2
=
C
ˉ
2
x
c
ˉ
\dot{x}_{\overline{\mathrm{c}}}=\bar{A}_{22} x_{\bar{c}}, y_2=\bar{C}_2 x_{\bar{c}}
x˙c=Aˉ22xcˉ,y2=Cˉ2xcˉ
系统按能观测行分解: 可以运用对偶原理。
8. 线性定常系统的状态反馈与状态观测器
-
状态反馈与极点配置。
用状态反馈实现闭环极点任意配置的充要条件是被控系统能控。 状态反馈不改变系统的零点, 只改变系统的极点。
在引入状态反馈后, 系统能控性不变, 但其能观测性不一定与原系统一致。单输入无零点 系统在引入状态反馈后不会出现零、极点对消, 故其能观测性与原系统保持一致。
-
输出反馈(到状态微分处)与极点配置。
用输出反馈实现闭环极点任意配置的充要条 件是被控系统能观测。输出反馈不改变系统的零点。
在引入输出反馈后不改变系统的能观测性, 但其能控性不一定与原系统保持一致。
-
输出到输入参考点的常值增益反馈可以配置的闭环极点数为 min { n , p + q − 1 } \min \{n, p+q-1\} min{n,p+q−1} 。
式中, p = rank B , q = rank C p=\operatorname{rank} \boldsymbol{B}, q=\operatorname{rank} \boldsymbol{C} p=rankB,q=rankC, 故一般情况下不能像输出到状态微分处反馈那样任意配置系统闭环极点。
-
状态观测器及其设计。
若被控系统 { A , B , C } \{\boldsymbol{A}, \boldsymbol{B}, \boldsymbol{C}\} {A,B,C} 能观测, 则其状态可用形如 x ^ ˙ = ( A − H C ) x ^ \dot{\hat{\boldsymbol{x}}}=(\boldsymbol{A}-\boldsymbol{H C}) \hat{\boldsymbol{x}} x^˙=(A−HC)x^ + B u + H y +\boldsymbol{B u}+\boldsymbol{H} \boldsymbol{y} +Bu+Hy 的全维状态观测器给出估值。矩阵 H \boldsymbol{H} H 按任意配置极点的需要来选择, 以决定状态误差衰减的速率。
分离定理:
若被控系统能控能观测, 当用状态观测器估值形成状态反馈时, 其系统的极点 配置和观测器设计可分别独立进行。即矩阵 K \boldsymbol{K} K 与 H \boldsymbol{H} H 的设计可分别独立进行。
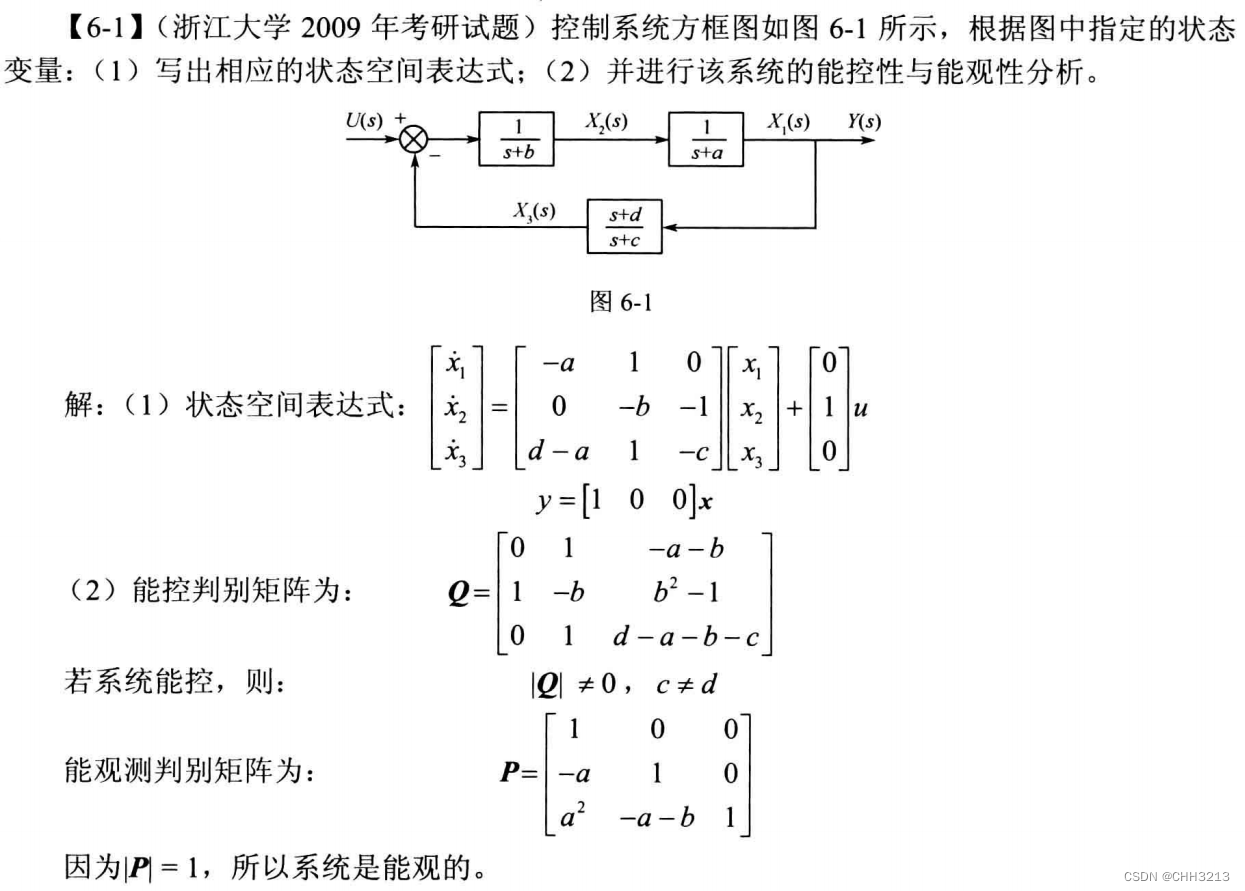
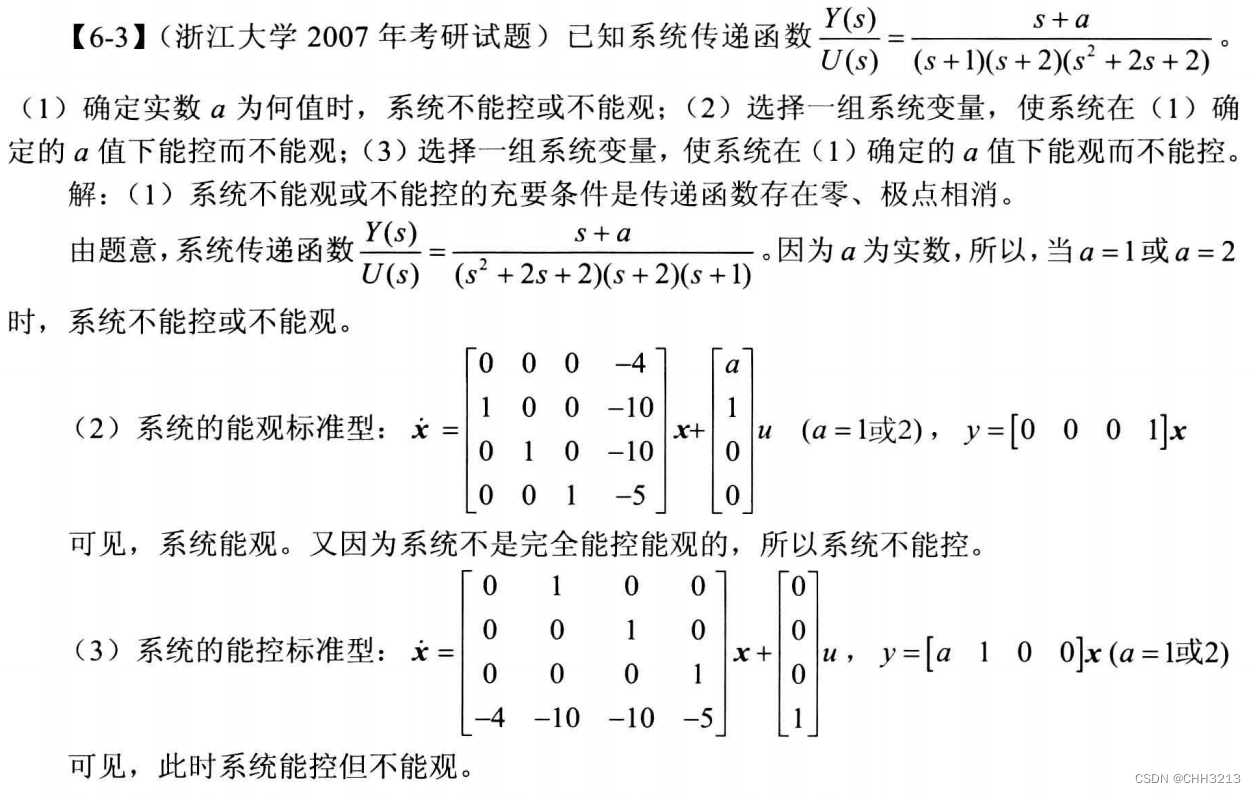
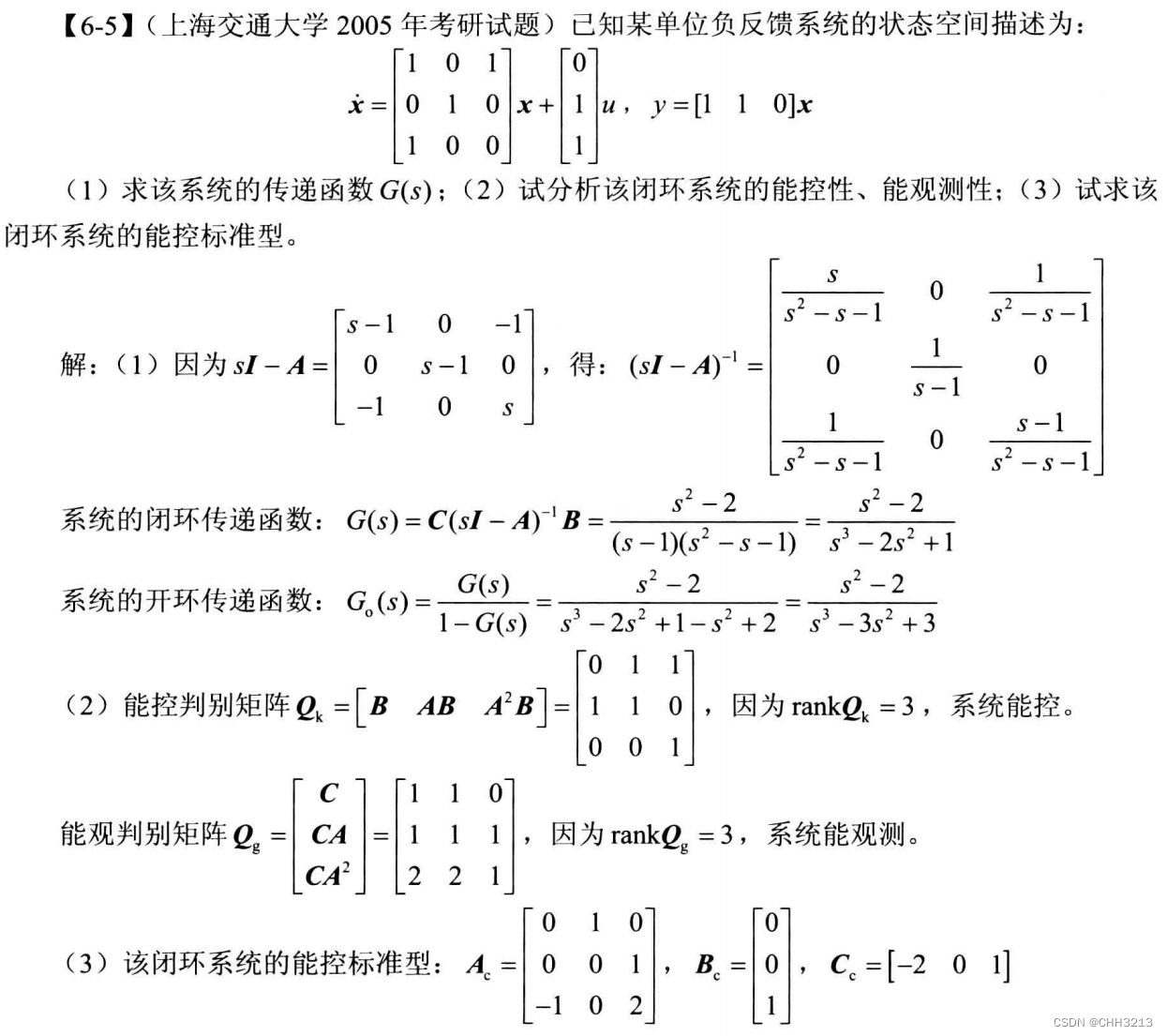
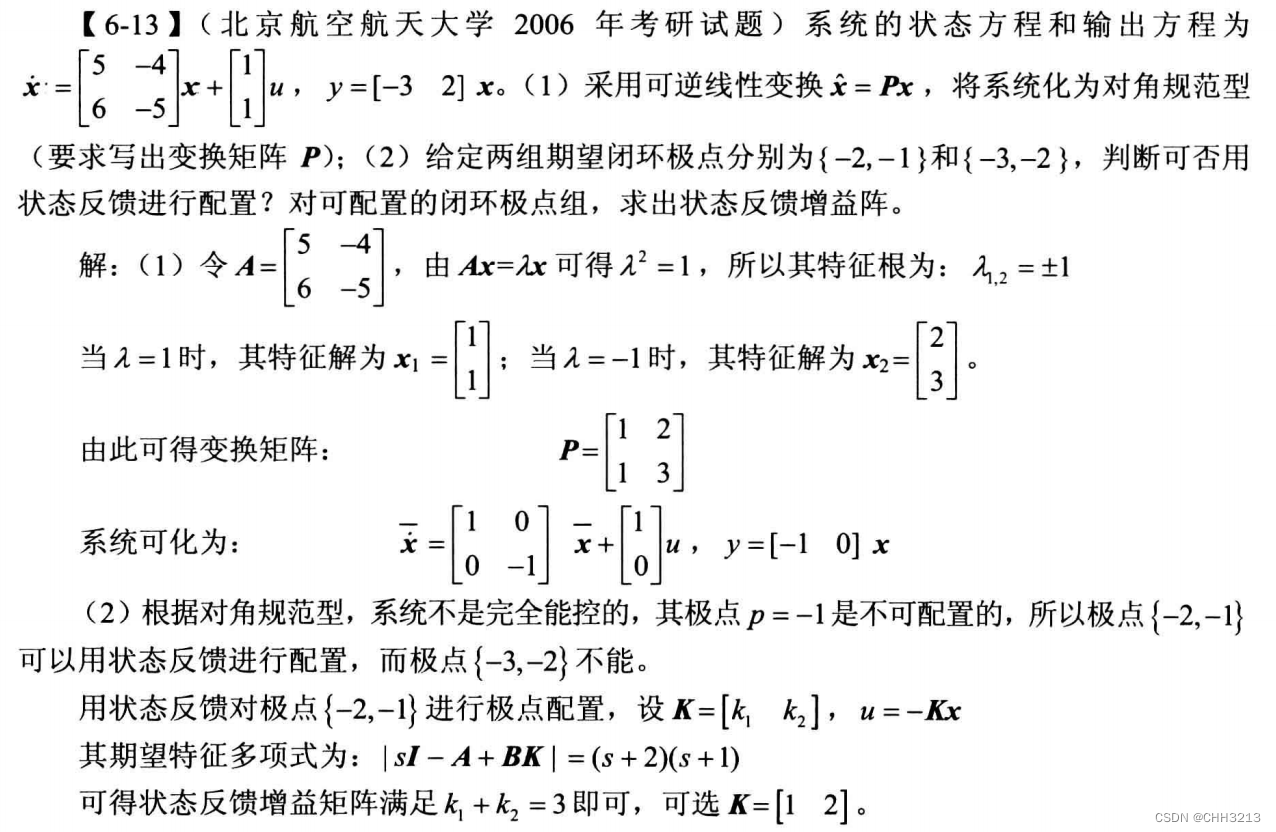
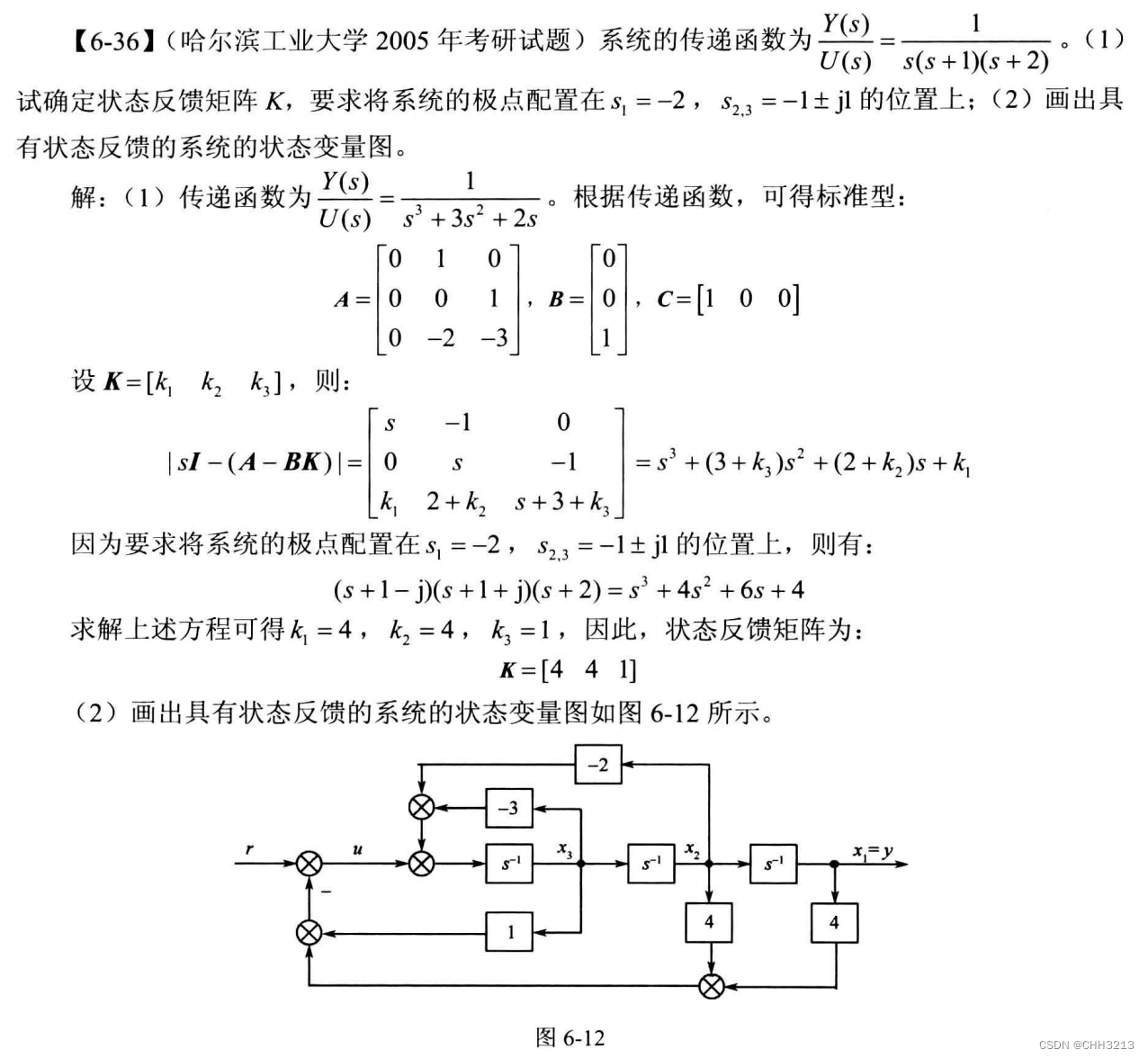
9. 例题




















 1219
1219

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











