






Isaac sim作为一款强大的仿真软件,可以对机械臂、车辆等进行动态仿真,其中涉及材料属性、颜色、光影效果等。但是当应用于工业场景时,涉及到的工业设备的复杂性、位姿的精确性等问题,无法在Isaac sim进行建模,因此借用solidworks强大的三维模型设计能力,并通过URDF插件设计相应关节,在Isaac sim实现整体的仿真验证。
版本:Isaac Sim 4.1.0 SolidWorks2023
一、基于SolidWorks的URDF插件设计关节
参考:SolidWorks插件SW2URDF使用_sw2urdf插件-CSDN博客
1.1 设计每个滚轮的坐标系以及坐标轴
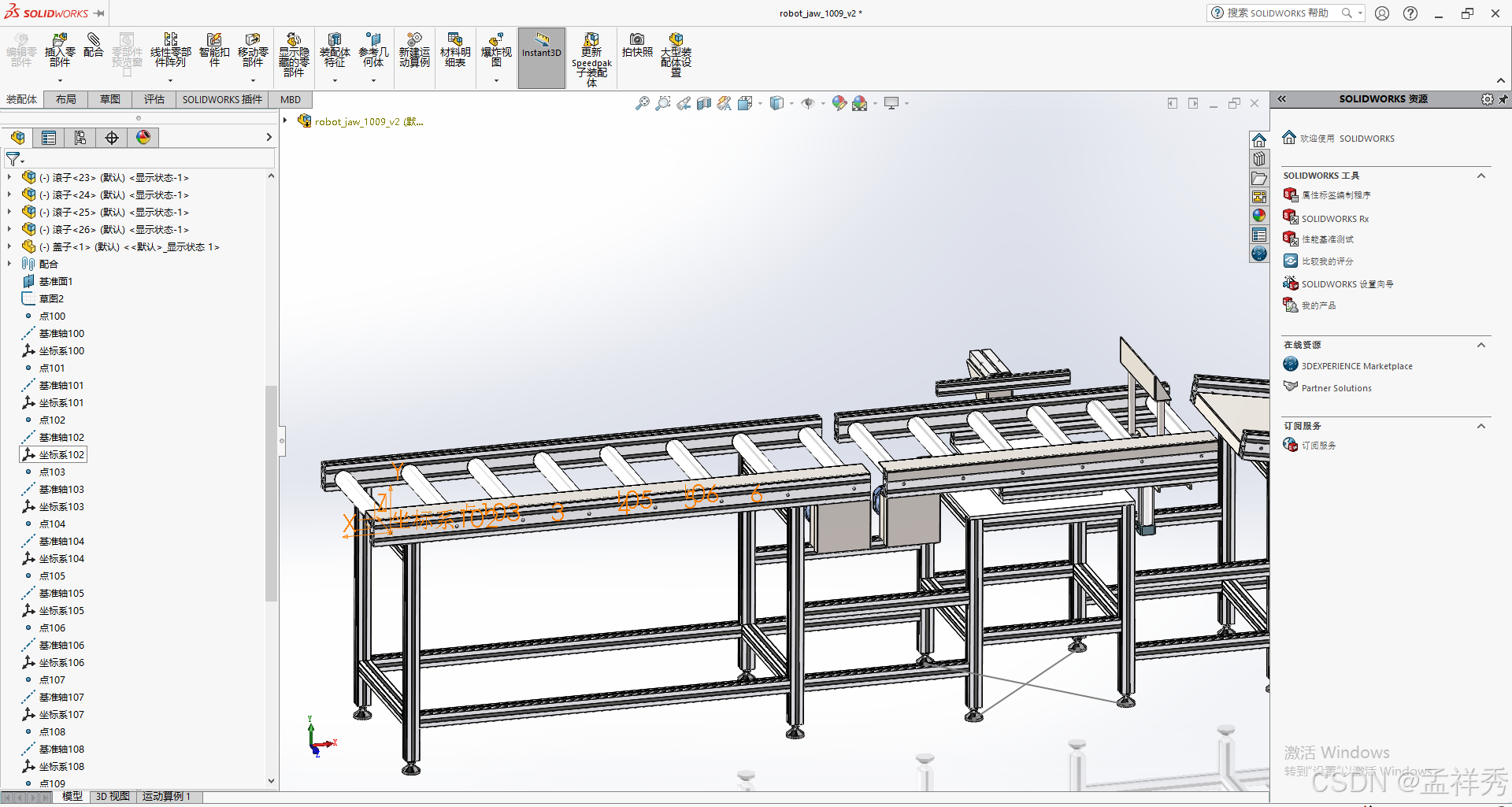
注意:
①SolidWorks设计装配体时,尽量不要将模型所在层级嵌入的太深,容易使得urdf插件无法导出模型
②一定在模型的最底部合适位置建立一个坐标系,作为该模型的整体的基座标,用于匹配导入Isaac Sim每个模型之间的相对位置关系
1.2 设计每个关节对应的模型,并对应相应坐标系及坐标轴
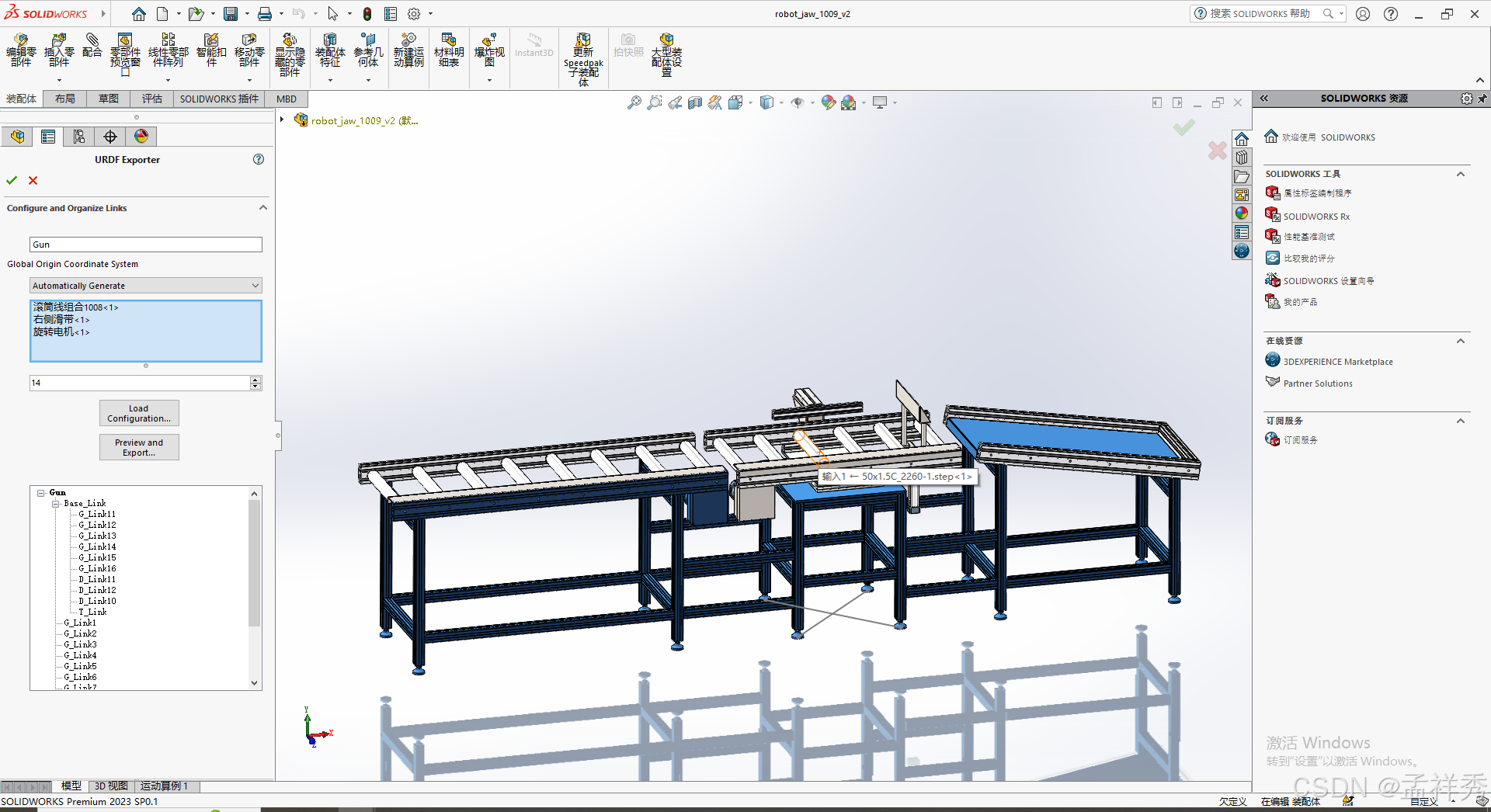
注意:传送带两侧的栏杆要单独设计关节,否则在仿真模拟时,无法阻挡传送带上的物品沿着辊道滑动
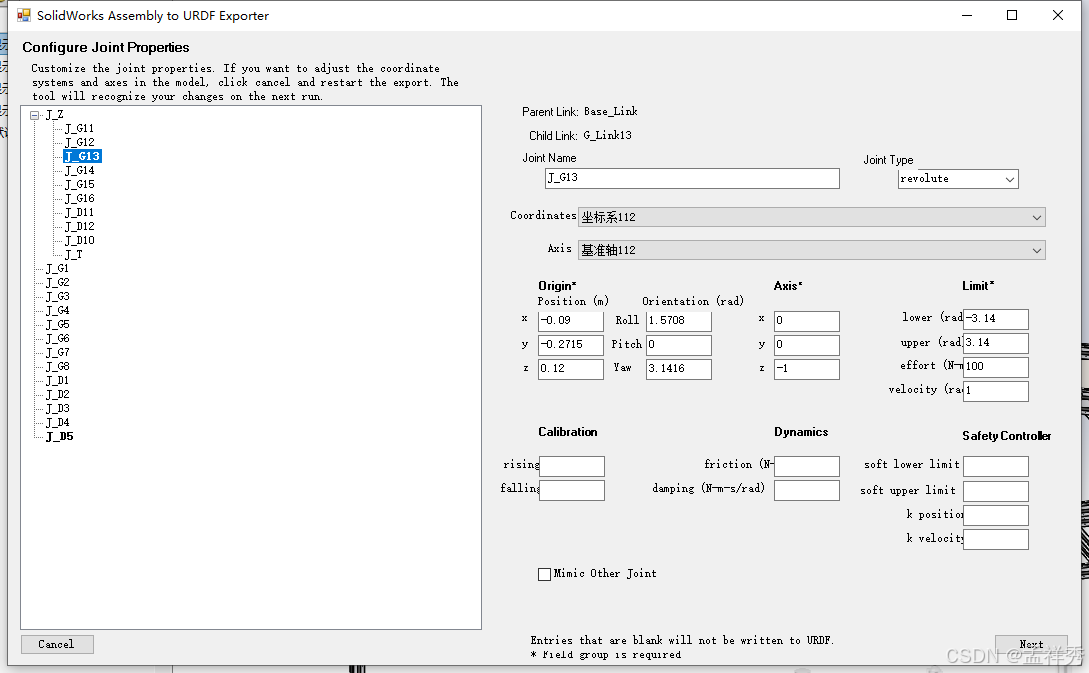
1.3 设计每个关节属性,并导出URDF
二、Isaac sim进行仿真
注意:期间注意多保存,该软件容易崩溃
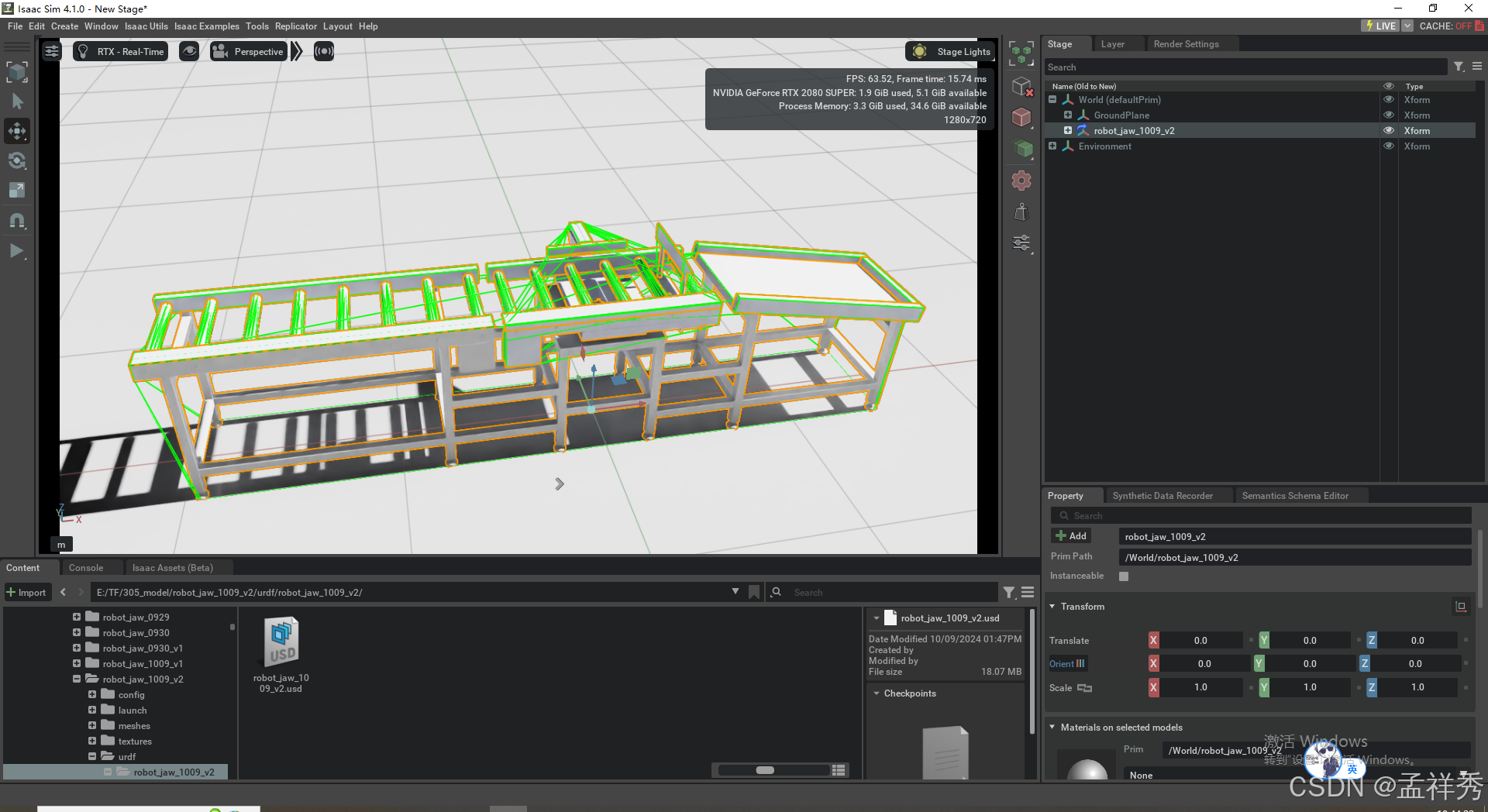
2.1 Isaac sim导入URDF
参考:URDF Import: Turtlebot — Omniverse IsaacSim latest documentation (nvidia.com)
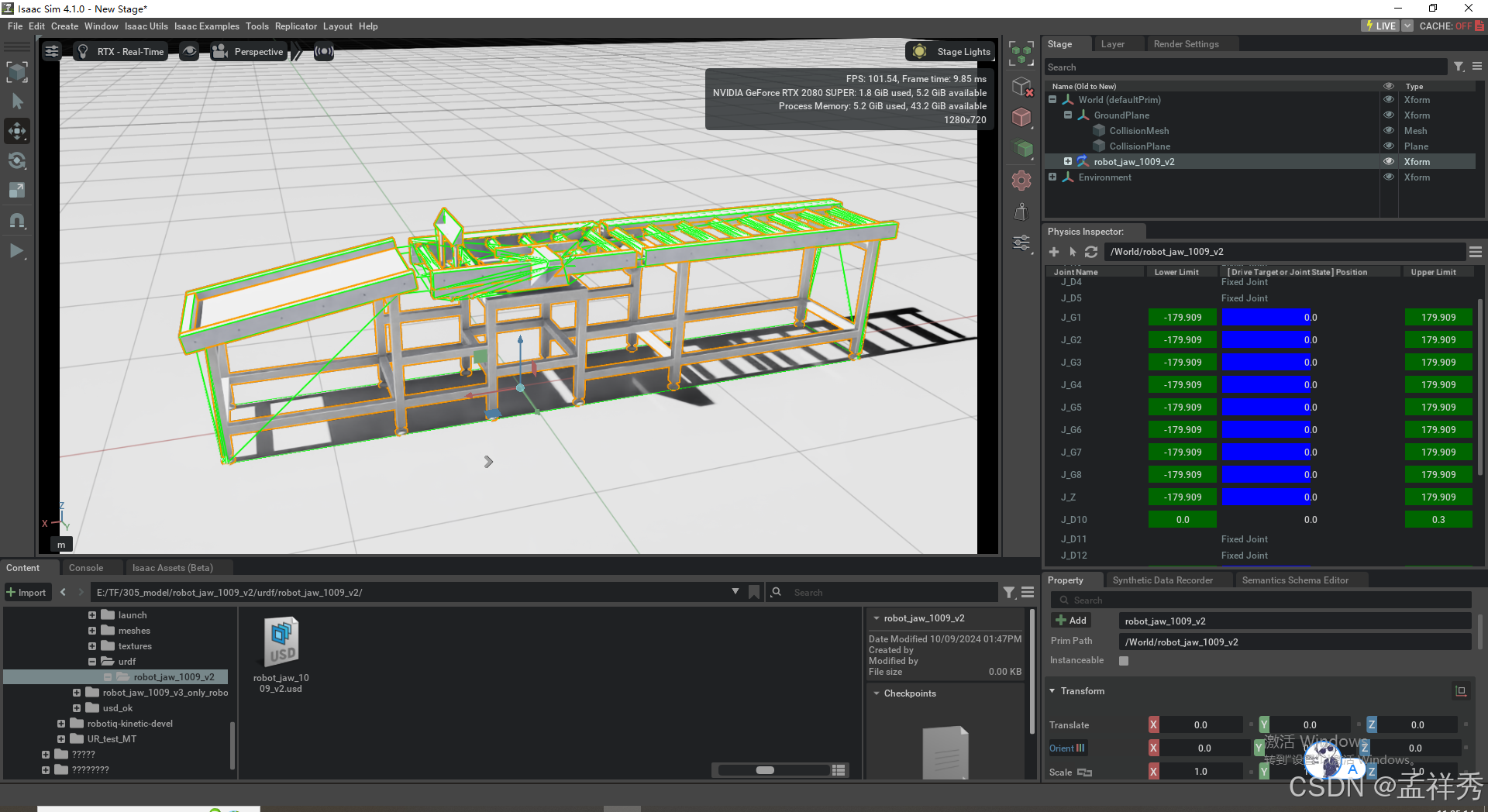
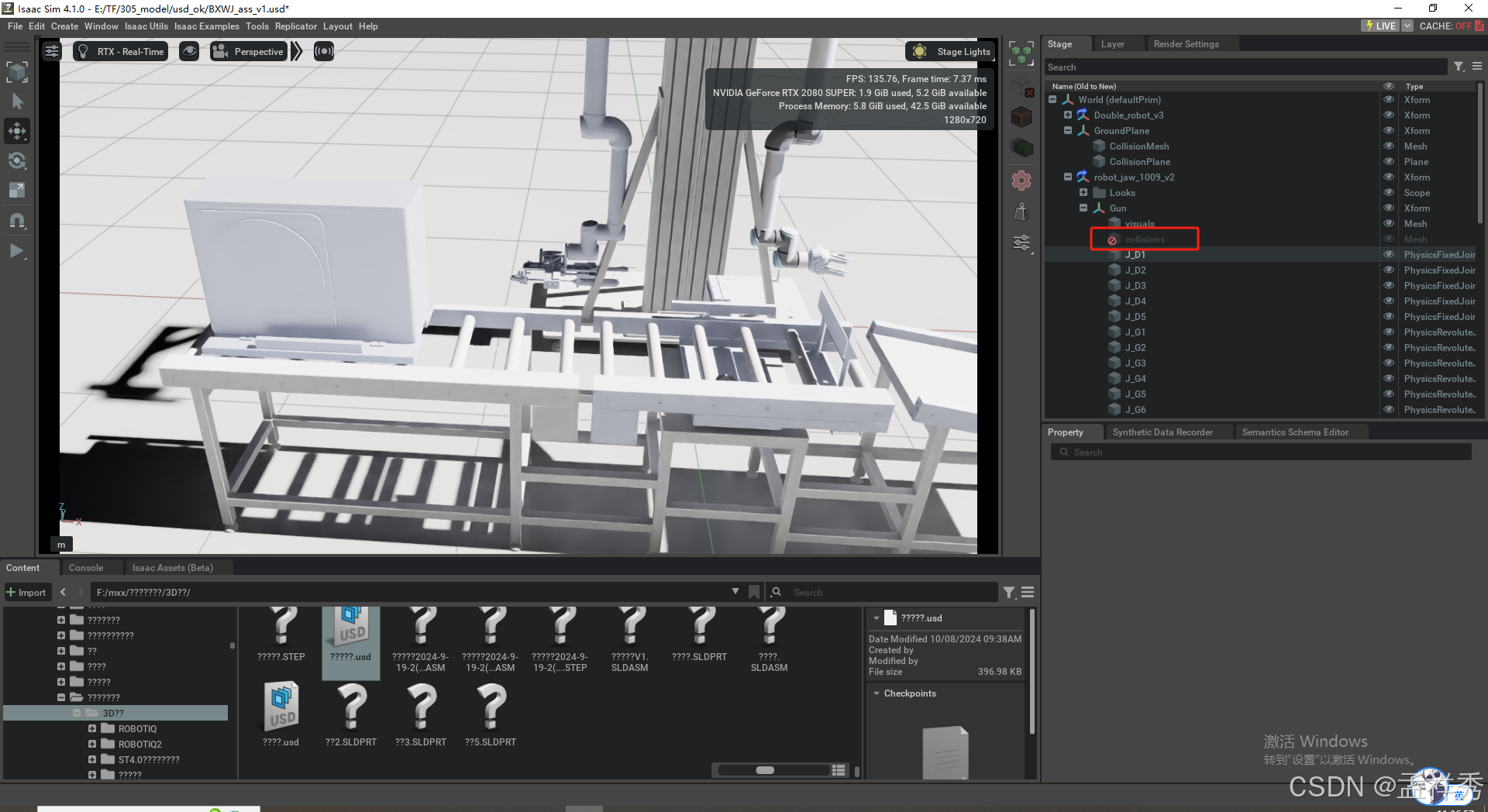
导入进来的模型,可以看到基座标在下方中间台子的中心处,坐标为0,0,0
查看碰撞属性方法:左上边![]() →Show By Type→Physics→Colliders
→Show By Type→Physics→Colliders
2.2 测试关节转动是否可行
参考:Adding a New Manipulator — Omniverse IsaacSim latest documentation (nvidia.com)
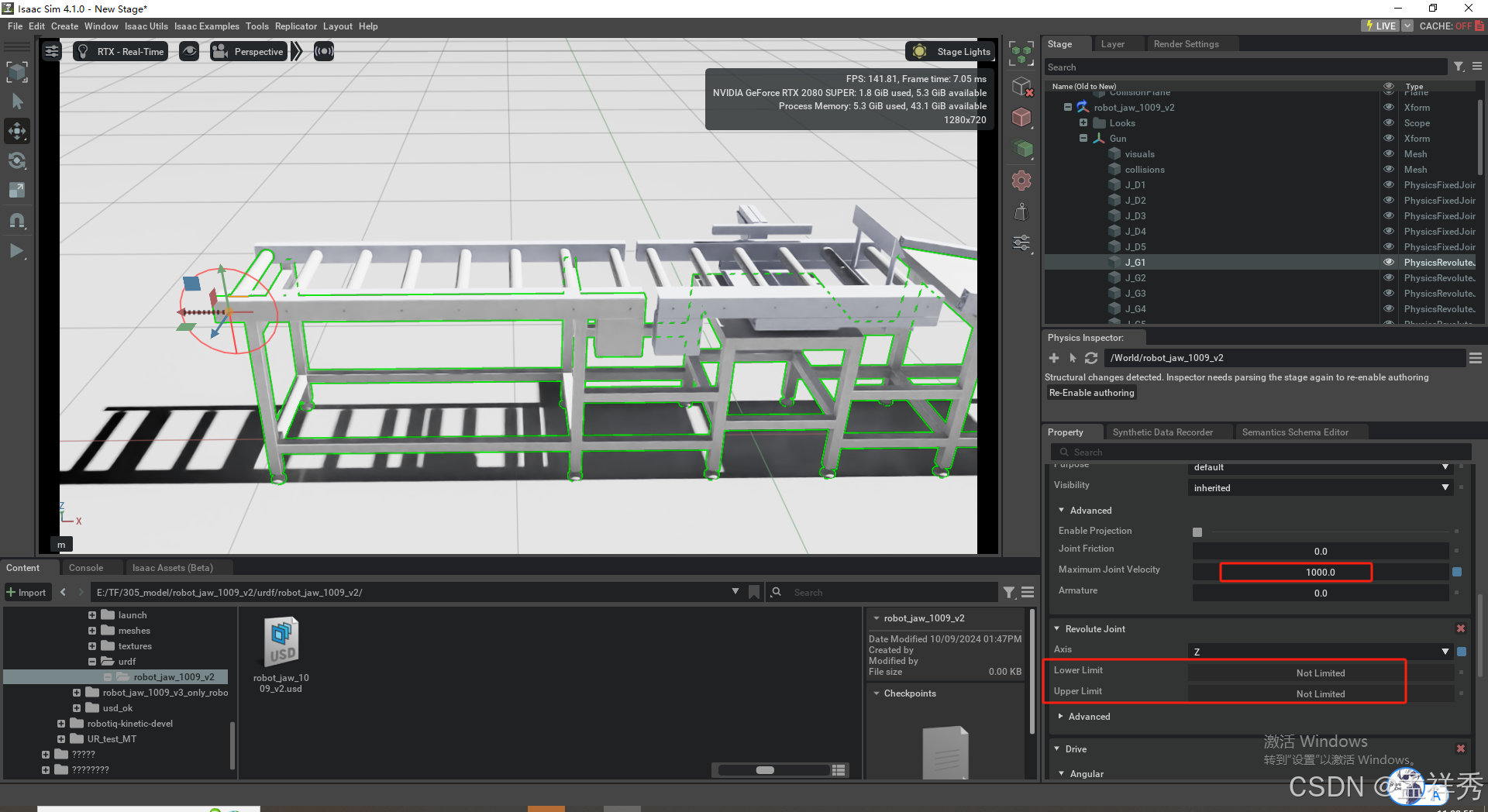
2.3 设计关节的最大转速、转动角度以及使用速度的驱动方式
设计关节的最大转速、转动角度。
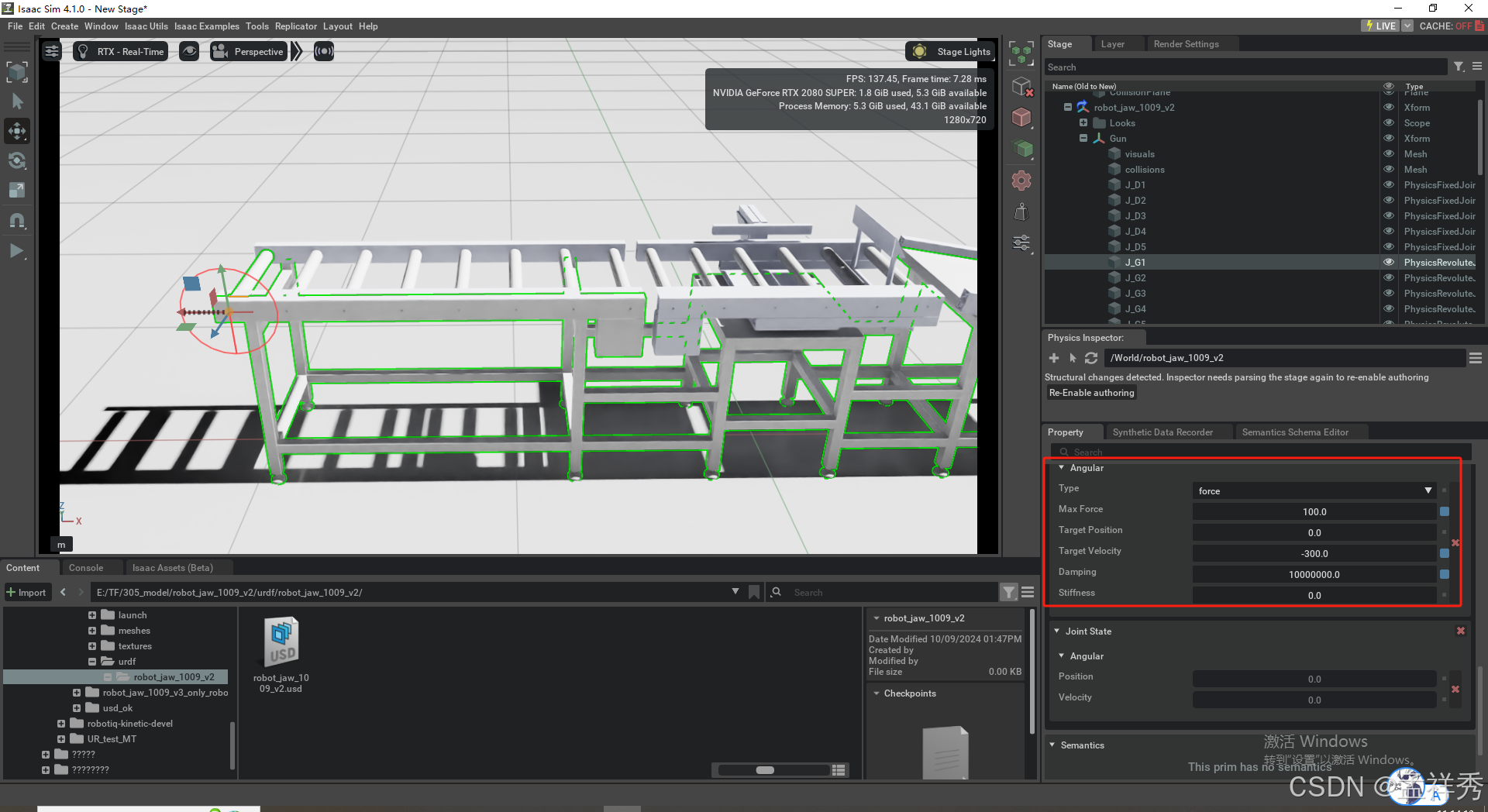
设计关节为速度的驱动方式
参考:Assemble a Simple Robot — Omniverse IsaacSim latest documentation (nvidia.com)
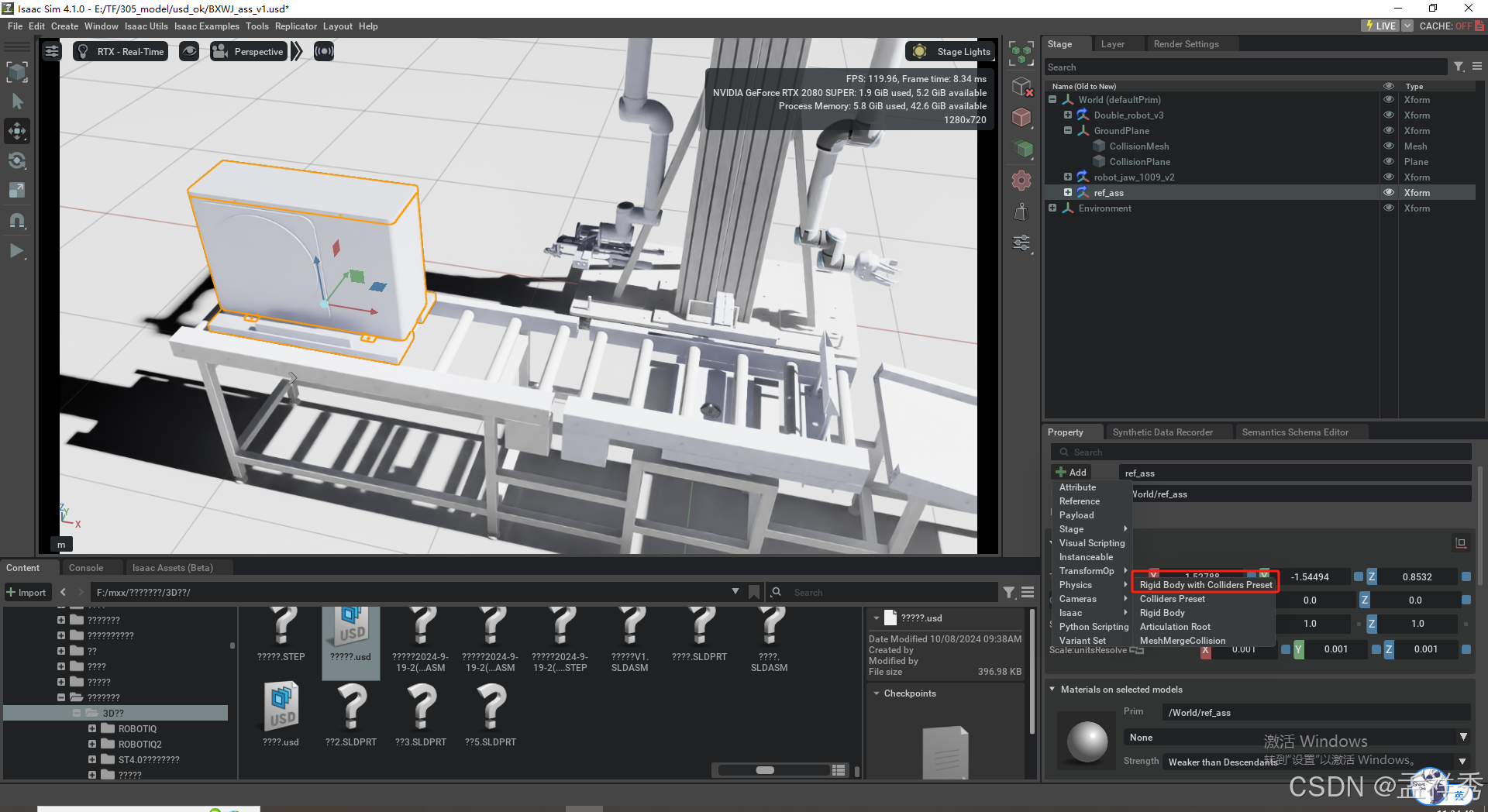
2.4 添加物体,并添加无论属性
2.5 删除辊道多余的碰撞属性
2.6 仿真测试
辊道仿真


















 275
275

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









