







几个有意思的概图

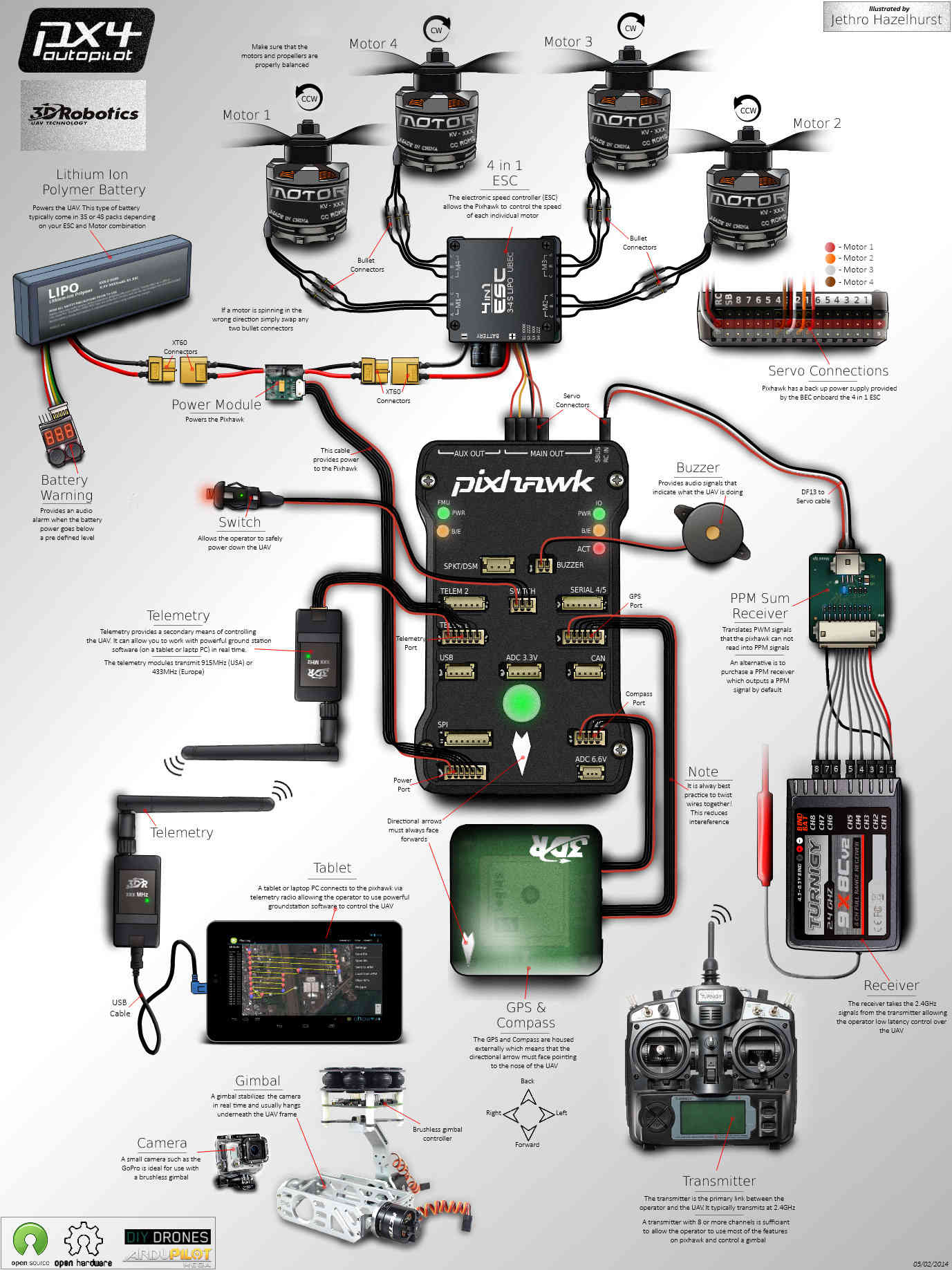
飞控
以公司正在使用的 cuav Pixhawk V6X 为例
https://www.cuav.net/v6x/
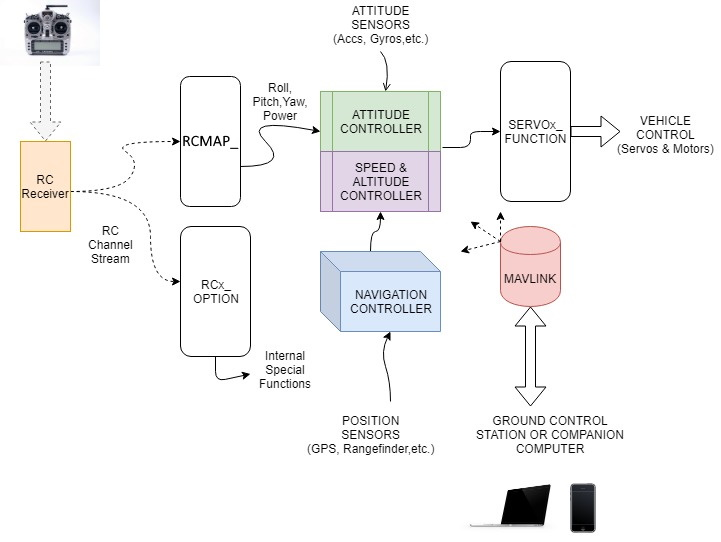
数传、飞控的mavlink连接
数传模块主要用于无人机于地面站共享数据,地面站通过数传可以获取无人机数据并且可以发送控制指令;与飞控的mavlink连接可以分为有线、无线;
-
有线连接
通过usb与飞控连接;
usb是物理接口;
在飞控中实际上是利用串口0实现了usb接口;
前提要在飞控配置中将串口0的协议配置为 MAVLink2; -
无线连接
在v6x飞控中实际上是用串口1,2,5实现了telem1,2,3接口,又称radio接口;
前提要在飞控配置中将串口125的协议配置为 MAVLink2;
这样配置后,飞控端telem1,2,3接口的物理连接可以实现无线数传模块的系列产品,以cuav为例: -
- CUAV Radio :针对低成本近距离的数传模块,可选频率为433MHZ\915MHZ,可选功率为:100mw、250mw、500mw、1W
-
- PW-LINK:WIFI串口模块,可以做近距离调试使用;兼容手机和电脑地面站
-
- XB Radio:中等距离数据传输模块,理想环境可达10KM+
-
- XTEND Radio:远距离视距数据传输模块,理想环境可达20KM+
-
- HackLlink:高清视频+数传+遥控器转发为一体的数字链路,理想环境可达3KM+
mavlink转发
- 机载计算机通过usb/网口与飞控建立malink连接后,将mavlink通过以下方法进行转发:tcp\、udp、usb等;机载计算机上运行mavros?mavsdk?
- 地面站通过usb/无线数据线传与飞控建立malink连接后,将mavlink通过以下方法进行转发:tcp\、udp、usb等;
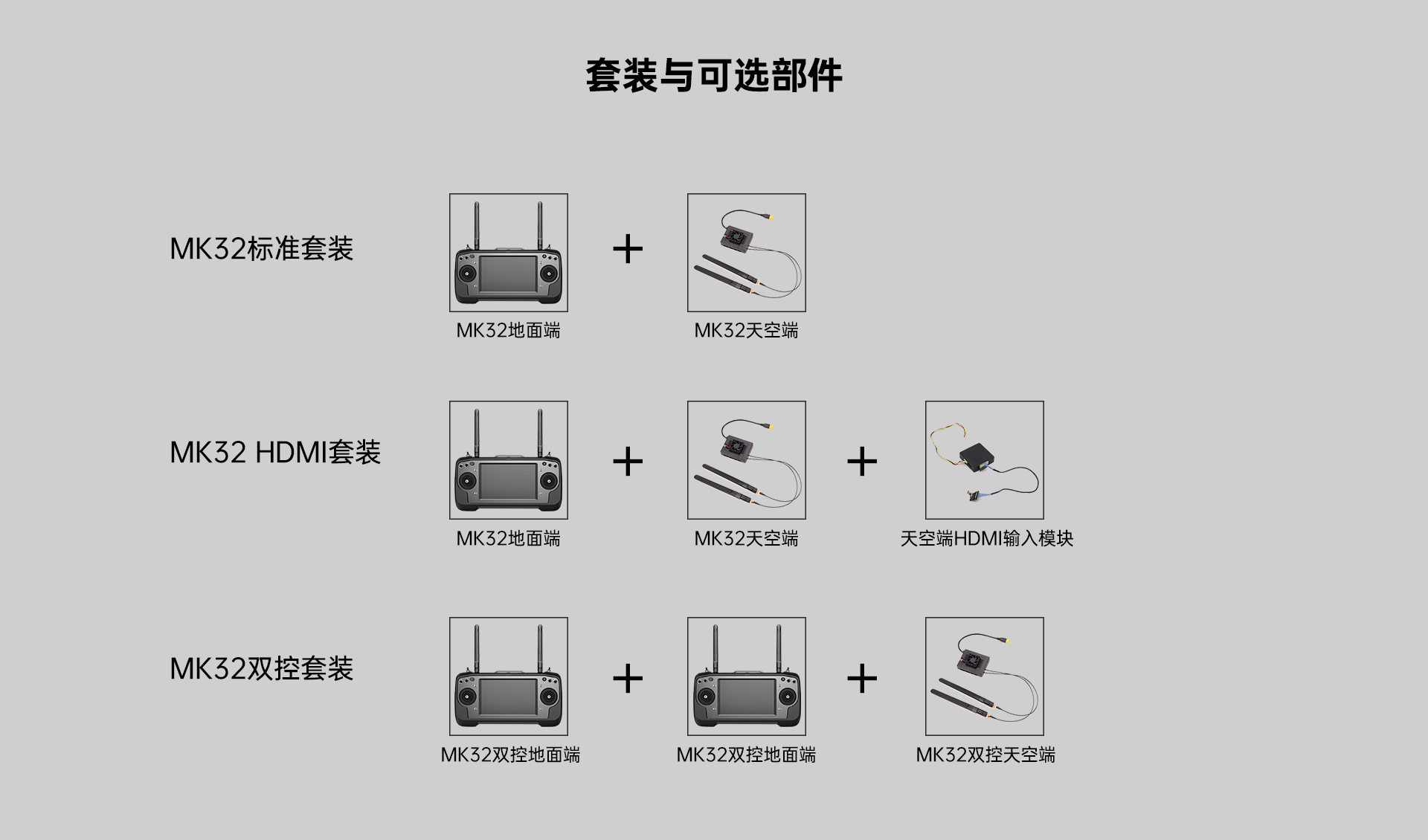
图数传一体,无线?
以siyi的产品为例:
注意数传与RC链路的区别
RC input :遥控信号输入
物理接口:PPM/SBUS input, DSM/SBUS input
https://ardupilot.org/copter/docs/common-cuav-pixhawkv6X.html

















 4573
4573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









