







学习基本的使用,最终完成机器人与相机标定+通讯!
1.创建项目文件
2.创建机器人

3.创建工具(接在法兰盘上)

这里想要将工具直接装在机器人上,直接拖动文件夹就可以啦!
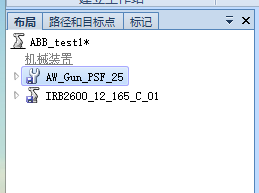
效果如下图

4.创建机器人系统(使用示教器让机器人运动)
4.1 开选项


点击完成!完成后,直接创建机器人系统。
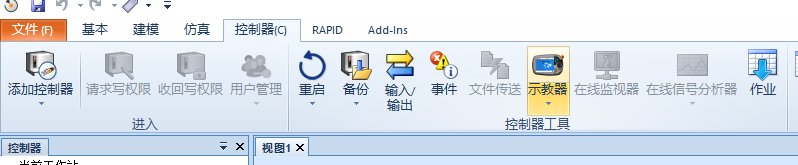
4.2 开虚拟示教器
虚拟示教器的位置在 控制器选项卡位置!

4.3切换手动模式
点击示教器的中间的一个非常小的框,切换手动+ENABLE,就可以控制机器人运动了!

学习基本的使用,最终完成机器人与相机标定+通讯!
1.创建项目文件
2.创建机器人
3.创建工具(接在法兰盘上)
这里想要将工具直接装在机器人上,直接拖动文件夹就可以啦!
效果如下图
4.创建机器人系统(使用示教器让机器人运动)
4.1 开选项
点击完成!完成后,直接创建机器人系统。
4.2 开虚拟示教器
虚拟示教器的位置在 控制器选项卡位置!
4.3切换手动模式
点击示教器的中间的一个非常小的框,切换手动+ENABLE,就可以控制机器人运动了!











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 1万+
1万+





