










容易混淆的几个概念
- 运动规划(Motion Planning):博主认为包括路径规划和轨迹规划,比较宏观

- 路径规划(Path Planning):只有几何属性,与时间无关,只关心位置;通常我们指任务层级的规划或者平面移动机器人的运动规划
- 轨迹规划(Trajectory Planning):轨迹具有时间属性,每个时刻对应有位置、速度、加速度等属性,两点之间还要涉及速度、加速度插值,包括梯形速度曲线等底层的轨迹插值算法。


常见算法
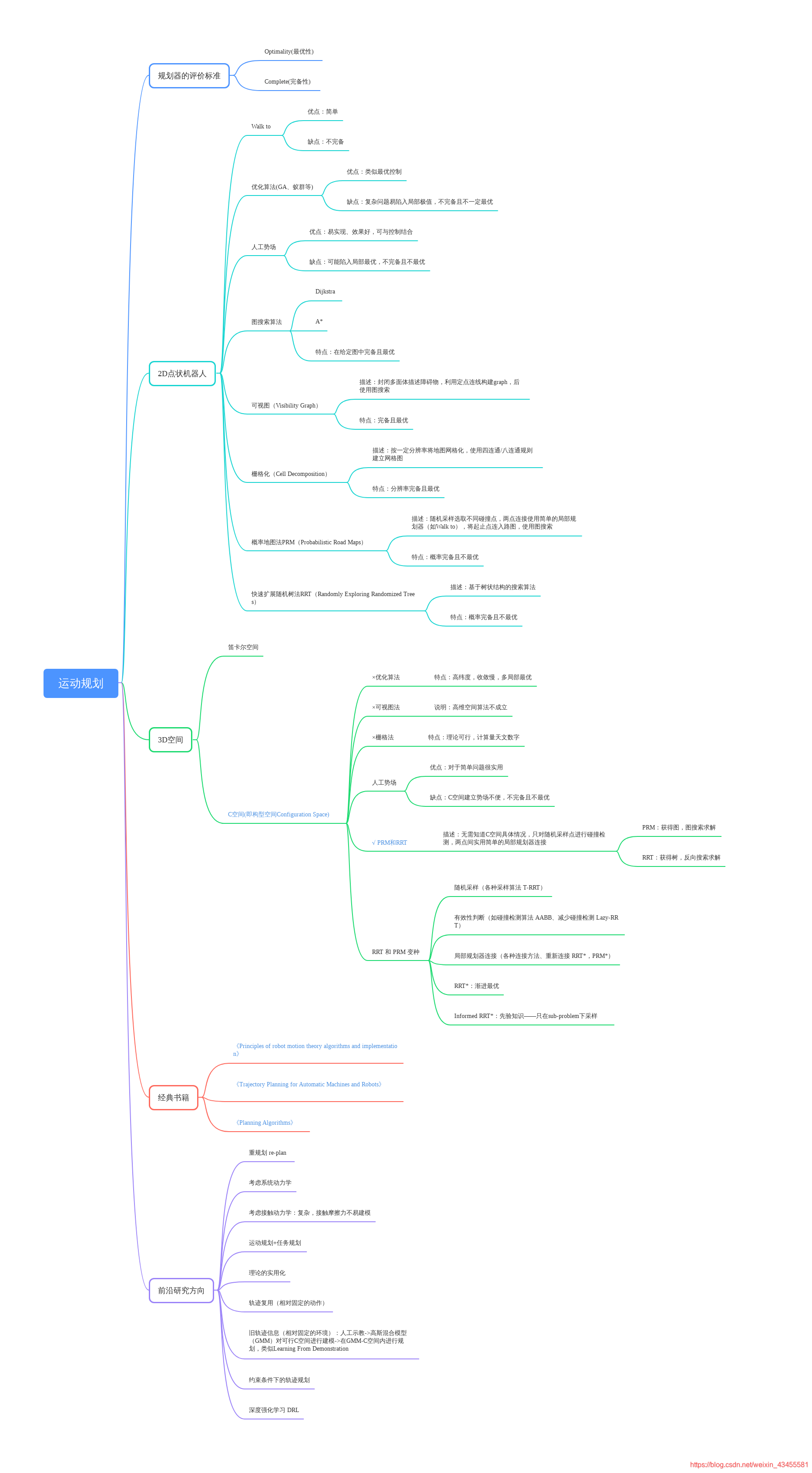
以上内容参考邱强qfly在雷锋网的公开课《实例介绍机械臂运动规划及前沿研究方向》,顺便总结博主个人理解。

















 3554
3554

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









