






 文章对比了轨迹规划和路径规划在机器人运动控制中的角色。轨迹规划关注生成平滑、连续的机器人运动轨迹,而路径规划则涉及在复杂环境中寻找避障路径。两者在机器人自主移动和任务执行中协同工作。
文章对比了轨迹规划和路径规划在机器人运动控制中的角色。轨迹规划关注生成平滑、连续的机器人运动轨迹,而路径规划则涉及在复杂环境中寻找避障路径。两者在机器人自主移动和任务执行中协同工作。
机器人轨迹生成涉及到轨迹规划和路径规划两个关键概念,它们是机器人运动控制中的重要组成部分。下面对轨迹规划和路径规划进行深入比较。
-
轨迹规划(Trajectory Planning):
- 定义:轨迹规划是指在机器人运动中确定机器人末端或关节的期望轨迹。它是在特定的工作空间中生成机器人的连续路径,以实现所需的任务。
- 特点:
- 连续性:轨迹规划要求生成平滑、连续的运动路径,使得机器人能够流畅地移动。
- 可行性:轨迹规划要保证生成的轨迹可以在给定的约束条件下实现,如避开障碍物、满足关节限制等。
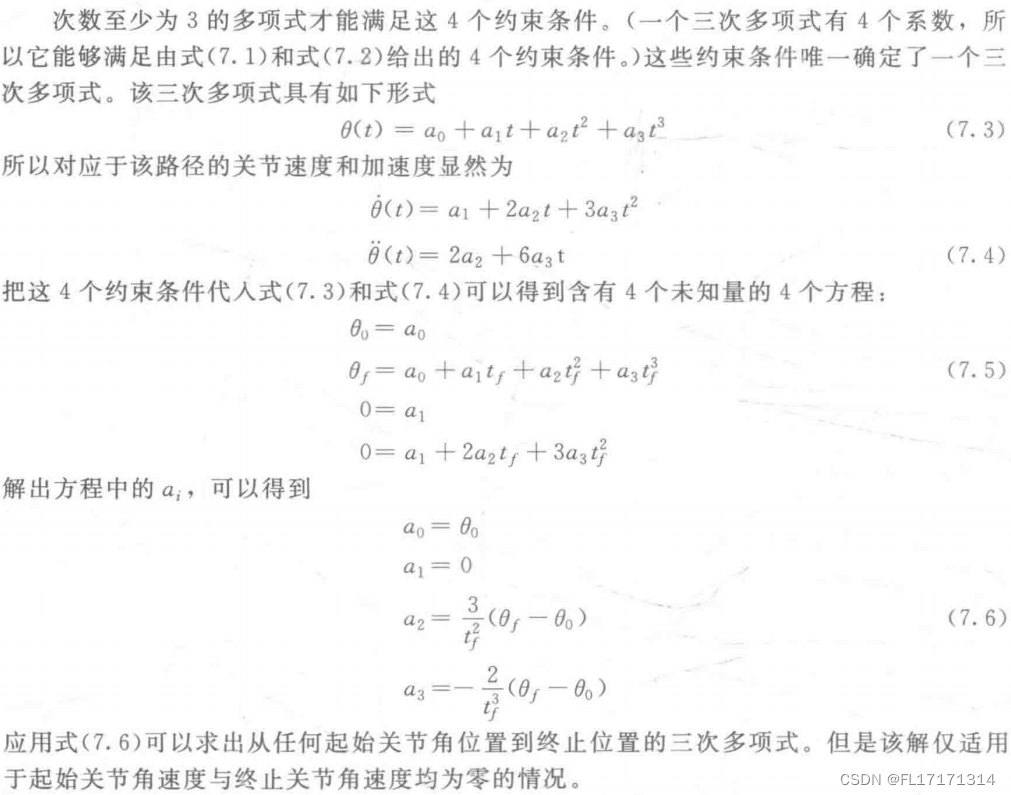
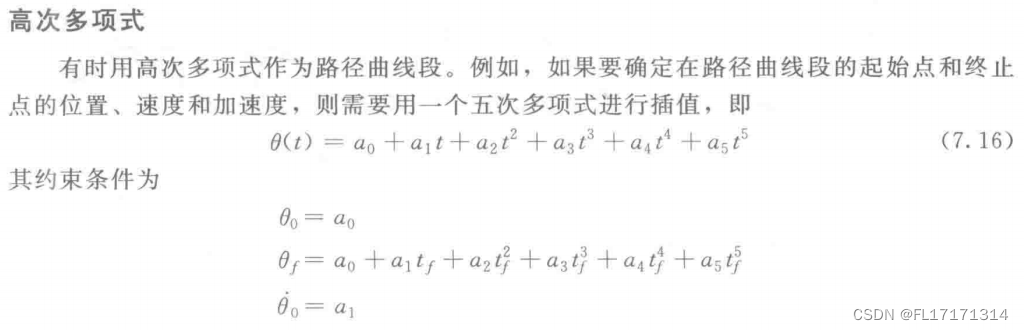
- 轨迹参数化:轨迹规划需要将轨迹表示为合适的参数形式,如多项式、样条曲线等,以方便控制器的跟踪和执行。
-
路径规划(Path Planning):
- 定义:路径规划是指在机器人的工作环境中寻找一条从起始位置到目标位置的合适路径。它关注的是在复杂环境中避开障碍物,找到可行的路径。
- 特点:
- 环境感知:路径规划需要获取环境信息,如障碍物位置、地图信息等,以进行路径搜索和规划。
- 可行性:路径规划要求找到一条避开障碍物的路径,使得机器人能够安全、有效地到达目标位置。
- 全局性和局部性:路径规划可以分为全局路径规划和局部路径规划。全局路径规划考虑整个工作环境,搜索可行路径;局部路径规划则关注机器人当前的运动状态,以应对动态障碍物或运动中的环境变化。
异同点总结:
- 目标:轨迹规划关注生成平滑连续的机器人运动轨迹,而路径规划关注找到避开障碍物的可行路径。
- 范围:轨迹规划是在特定的工作空间中生成机器人的运动轨迹,而路径规划是在机器人的工作环境中寻找一条合适的路径。
- 输入信息:轨迹规划通常需要已知起始和目标位置,路径规划需要环境信息和障碍物位置。
- 概念重点:轨迹规划强调连续性、可行性和轨迹参数化,而路径规划强调环境感知、可行性和全局性/局部性规划。
总体而言,轨迹规划和路径规划在机器人运动控制中扮演着不同的角色。轨迹规划主要关注机器人末端或关节的运动轨迹生成,以满足特定任务要求,例如精确控制和运动轨迹跟踪。而路径规划主要关注机器人在复杂环境中的路径搜索和规划,以确保机器人能够安全、有效地避开障碍物到达目标位置。两者在机器人运动控制中密切配合,共同实现机器人的自主移动和任务执行。

参考文献:机器人导论


















 3611
3611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









