









项目场景:
启动gazebo仿真和Rviz显示,运行launch文件同时启动
第一个问题描述:
[ERROR] [1639816508.596162840]: Geometry tag contains no child element.
[ERROR] [1639816508.597136451]: Could not parse collision element for Link [manipulator_Link]

第一个原因分析:
[manipulator_Link]无法分析成功,查看urdf文件,搜索[manipulator_Link]发现, <collision>中的几何信息被隐藏了
第一个解决方案:
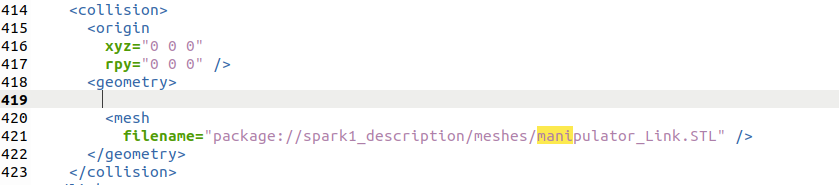
添加几何信息
第二个问题描述:
启动时会有警告提示

第二个原因分析:
根据提示在urdf文件中找到diffdrive的部分,缺少了这些信息
第二个解决方案:
在urdf的diffdrive中添加这些信息















 1835
1835











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









