







Ubuntu2204 humble在使用launch运行gazebo的时候
ros2 launch gazebo_ros gazebo.launch.py 电脑死机,进程结束。
解决方法:
在launch之前先source,设置环境变量
source /usr/share/gazebo/setup.bash然后再运行
ros2 launch gazebo_ros gazebo.launch.py完美解决问题。
为了以后可以不用每一次ros2 launch之前都source
在主文件夹下按Ctrl +h显示隐藏的文件夹和文件,然后打开.bashrc文件
在最后一行加入即可
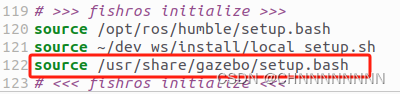
source /usr/share/gazebo/setup.bash














 469
469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









