









 本文介绍了如何在RobotStudio中利用模块化程序设计提高代码清晰度。通过创建例行程序来封装搬运工件的动作,并演示了如何复制例行程序以快速实现对第二个工件的搬运,只需调整工件坐标系的偏倚参数。此外,还阐述了如何通过pp指令测试和调用例行程序,确保程序的正确运行。
本文介绍了如何在RobotStudio中利用模块化程序设计提高代码清晰度。通过创建例行程序来封装搬运工件的动作,并演示了如何复制例行程序以快速实现对第二个工件的搬运,只需调整工件坐标系的偏倚参数。此外,还阐述了如何通过pp指令测试和调用例行程序,确保程序的正确运行。
当程序比较复杂,或者程序内存在重复的部分时,模块化程序设计往往是比较可行的办法。在RobotStudio中可以通过在主程序中调用不同的例行程序,达到使代码逻辑清晰的目的。
将搬运工件的动作保存为例行程序
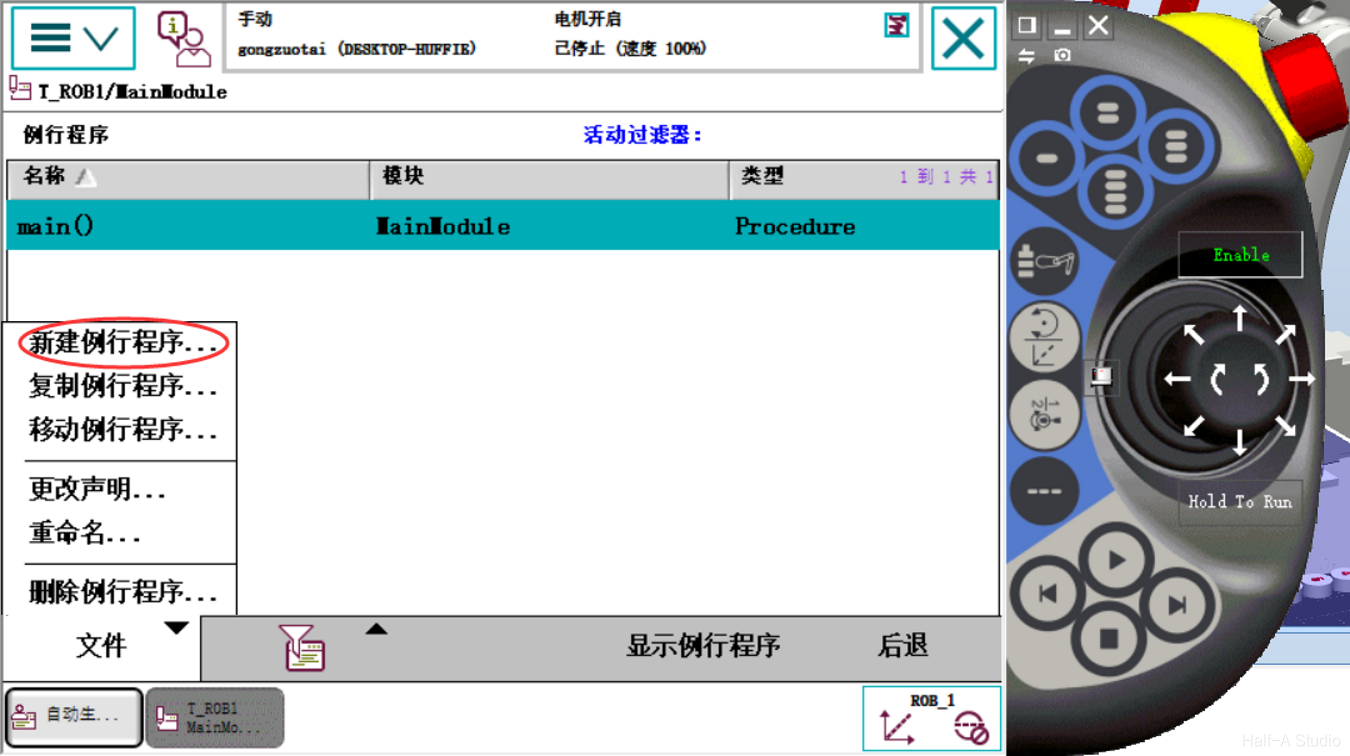
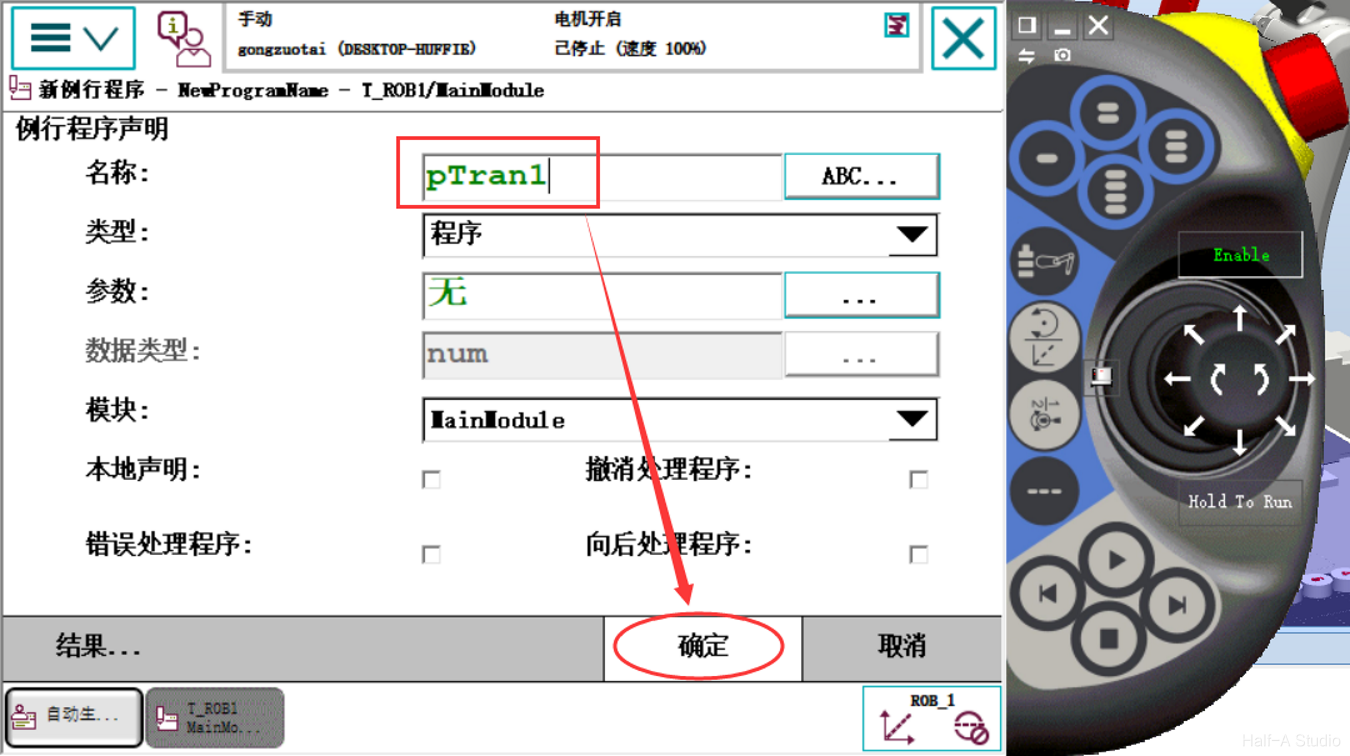
- 进入例行程序,新建一个例行程序
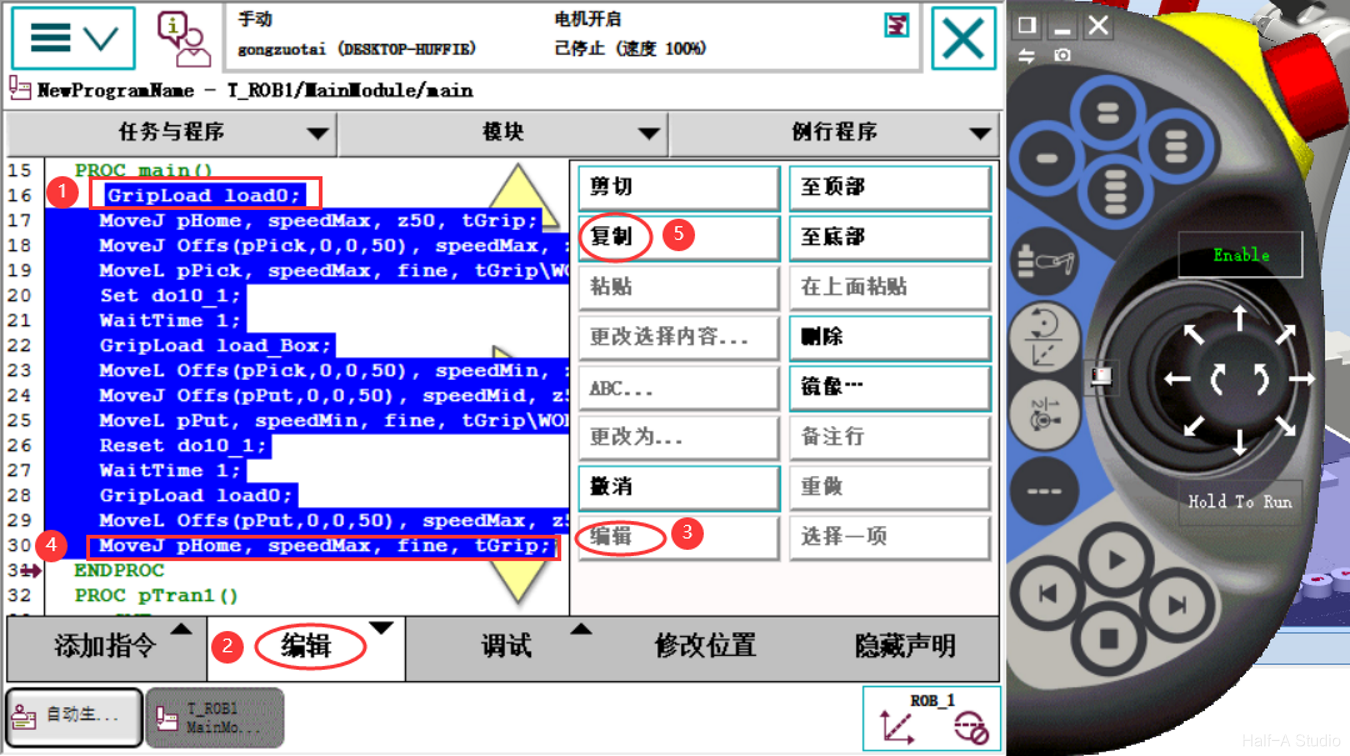
- 回到main程序,鼠标选中第一行,点击编辑-编辑,将main函数内的代码复制到新建的例行程序中
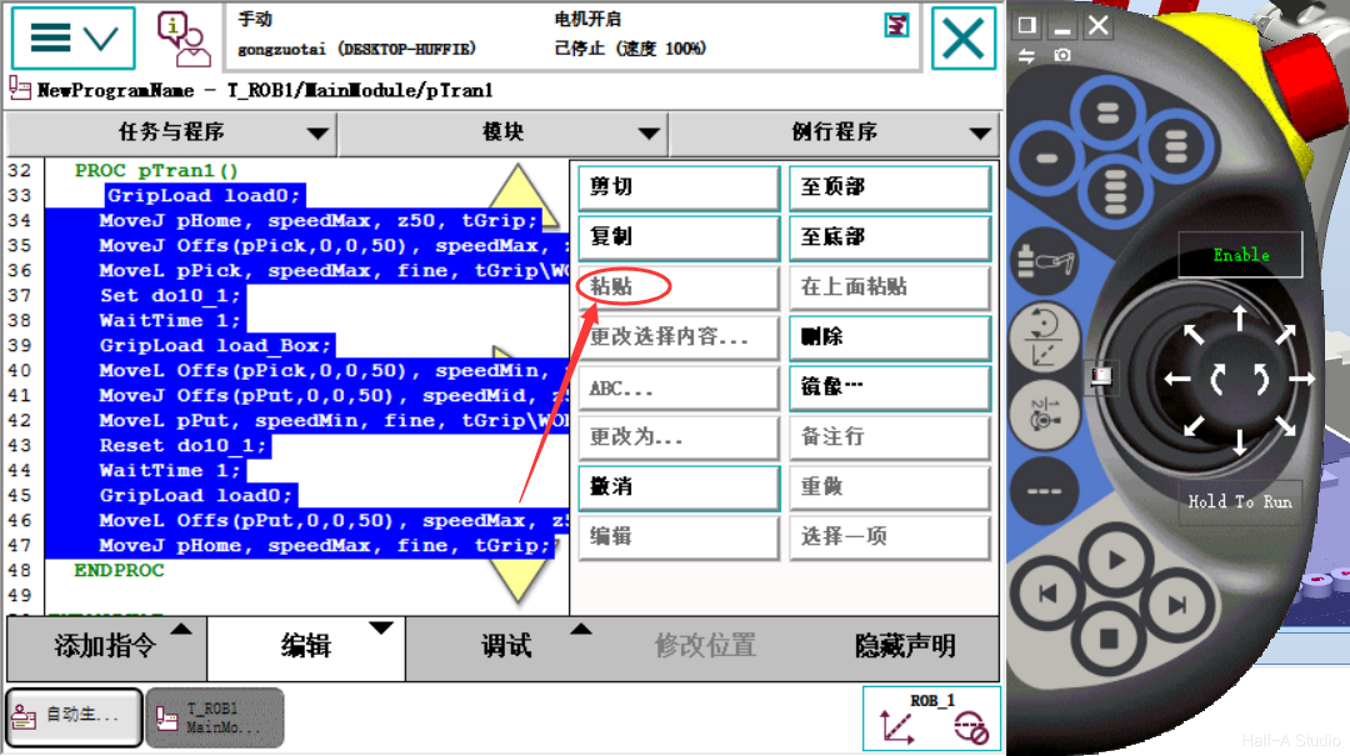
- 回到刚才新建的例行程序中,将main函数代码粘贴过来。
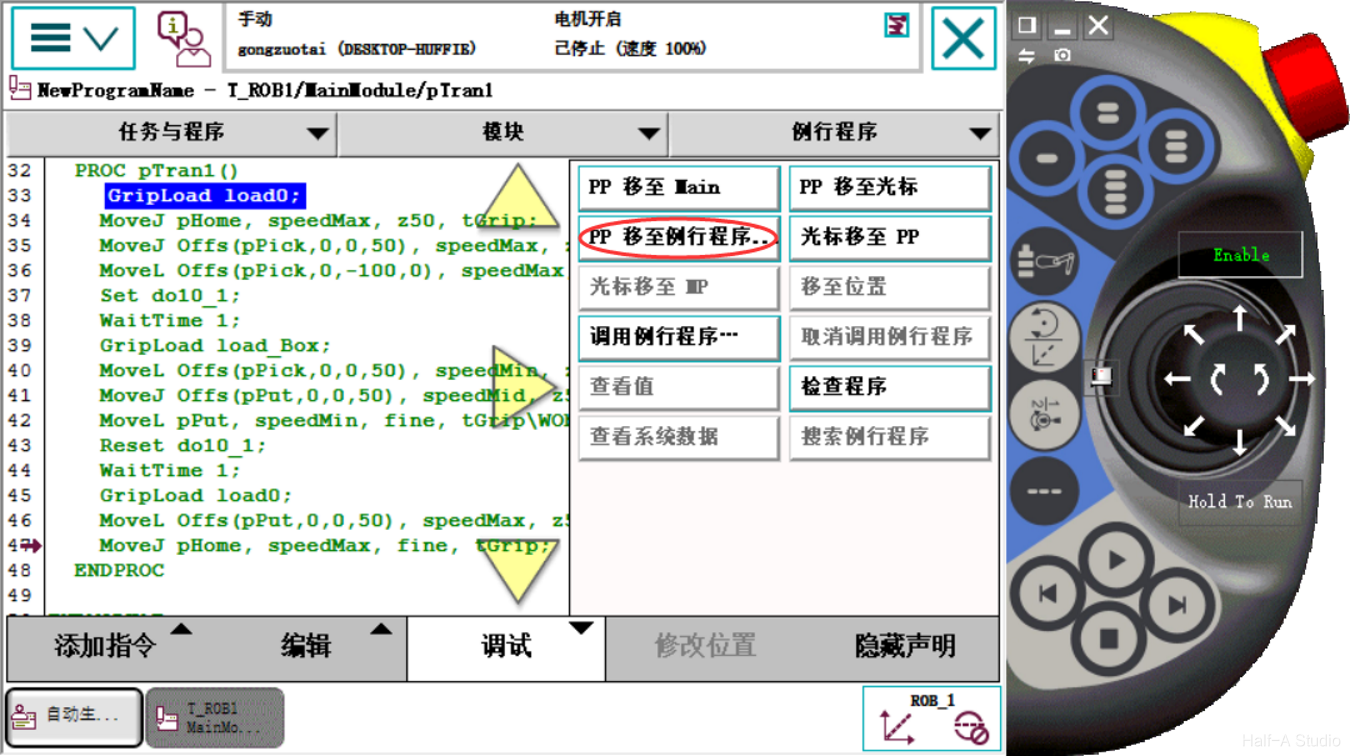
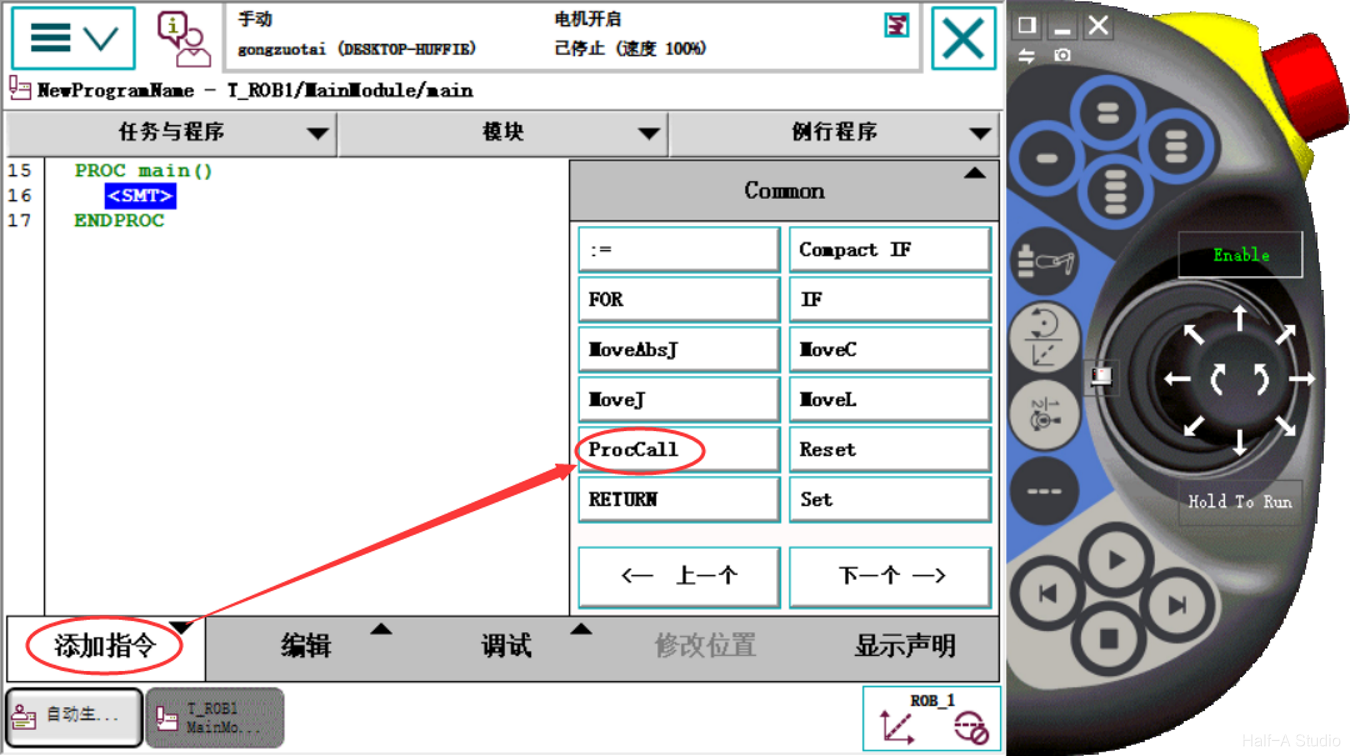
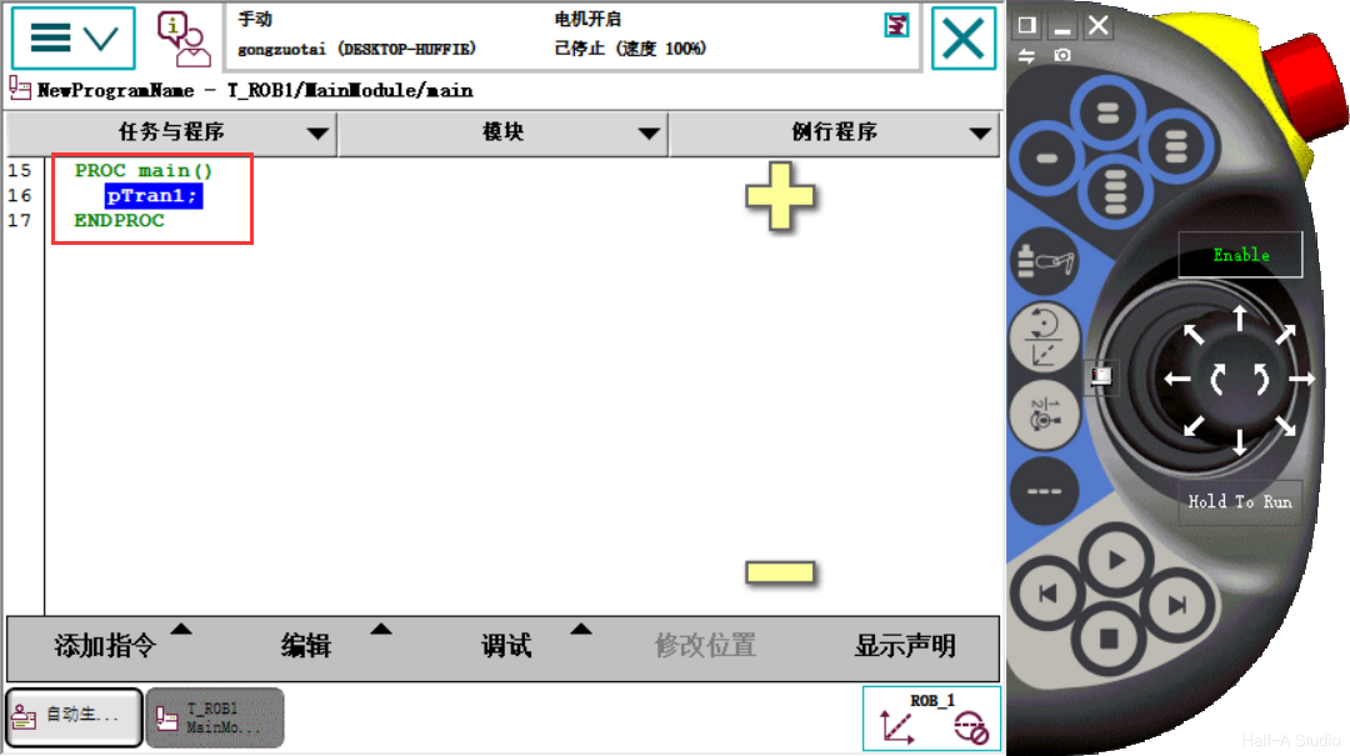
- 利用调试-pp移至例行程序,测试例行程序是否正确,没有问题的话,就将main函数的内容,用指令procall代替。
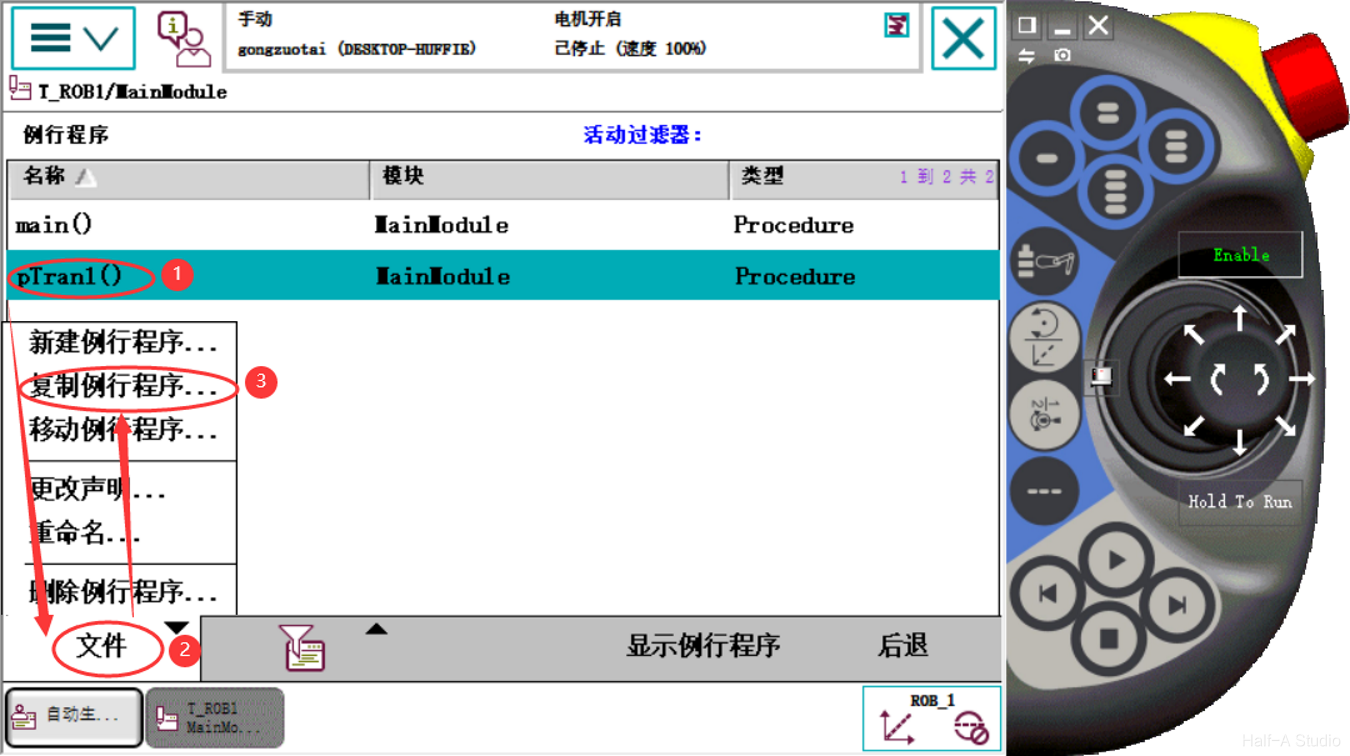
快速实现搬运第二个工件
- 首先将搬运工件的例行程序复制一份

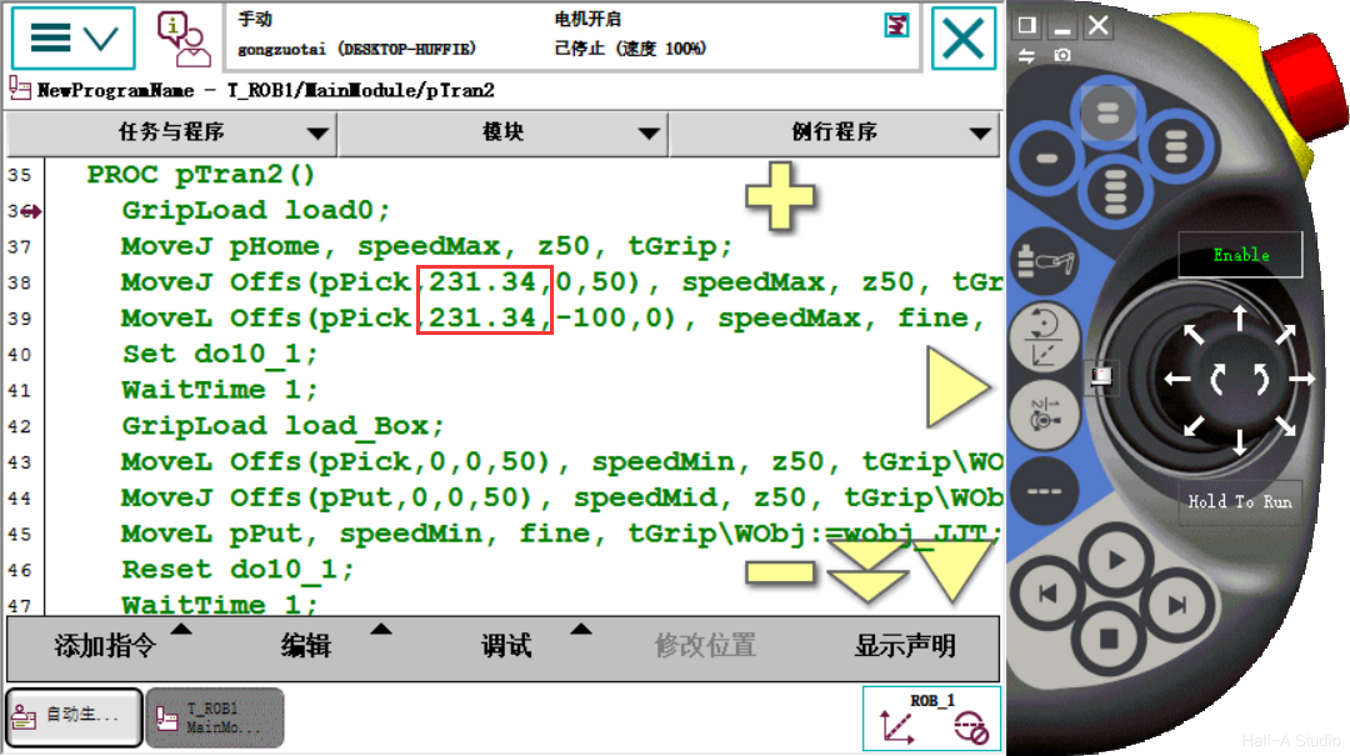
- 因为工件的位置是利用仓库的工件坐标系通过偏倚确定的,因此只需要修改Offs函数的参数即可确定第二个工件的夹取位置。


















 3156
3156

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











