







项目场景:
在你的Gazebo界面显示或不显示激光雷达的线
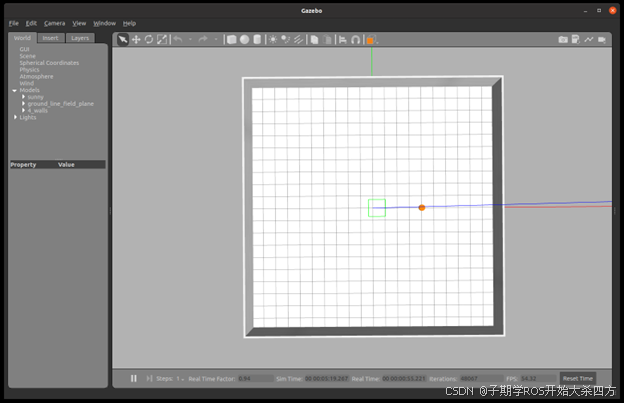
不显示激光雷达
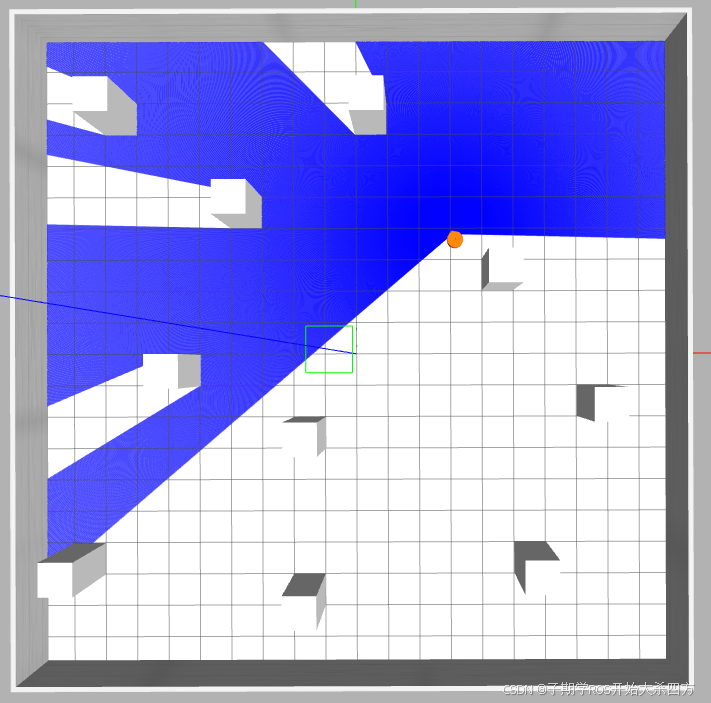
显示激光雷达的线
解决方案:
需要找到你编写的小车的urdf文件
例如我的在文件目录:/home/ziqi/DRL-robot-navigation-ziqi/demo/robot/src/simu/urdf 文件夹下面

找到你的这两个,xju_model.gazebo.xacro
<gazebo reference="laser_link">
<material>Gazebo/Red</material>
<sensor type="ray" name="lds_lfcd_sensor">
<pose>0 0 0 0 0 0</pose>
<visualize>$(arg laser_visual)</visualize>
<update_rate>10</update_rate>
<ray>
<scan>
<horizontal>
<samples>1387</samples>
<resolution>1</resolution>
<min_angle>-1.937315</min_angle>
<max_angle>1.937315</max_angle>
</horizontal>
</scan>
<range>
<min>0.1</min>
<max>20</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_lds_lfcd_controller" filename="libgazebo_ros_laser.so">
<topicName>scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
我的雷达在gazebo中是这样定义的,然后
<visualize>$(arg laser_visual)</visualize>
这个标签控制是否在 Gazebo 中可视化激光扫描的图形。是 ROS 参数(或 launch 文件中的 argument),它的值决定是否显示激光数据。如果这个参数值为 ,则激光数据将在 Gazebo 中可视化(通常是显示为一个激光束的线条)。如果为 ,则不会显示激光束的可视化图形。$(arg laser_visual)true false
找到这个标签所在的地方
<xacro:arg name="laser_visual" default="true"/>
把default=“true” 改为false即可不显示。

















 1402
1402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









