







1、启动仿真环境
(1)
bash scripts/bootstrap_neo.sh
(2)选择Mkz Standard Debug, Mkz Example, sunnyvale Big Loop,打开Sim_control.
(3)启动planning、routing
(4)设置起点终点
(5)进入/apollo_workspace/modules/tools路径下录制行驶轨迹,
cyber_recorder record -a
(6)回到dreamview,点击Send Routing Request.
2、调整参考线平滑参数
在/apollo/modules/planning/conf/discrete_points_smoother_config.pb.txt文件中修改相关参数。
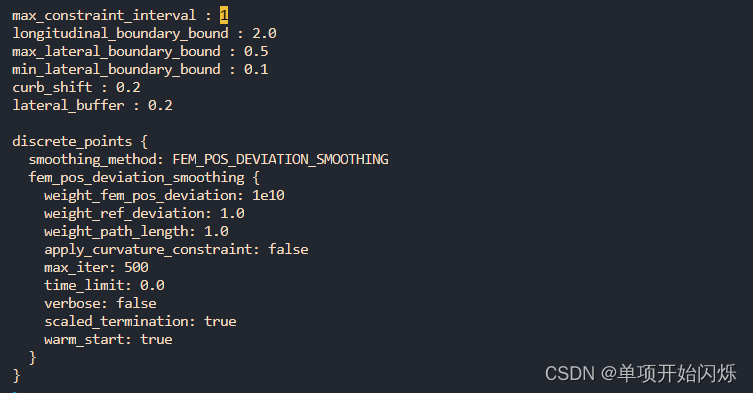
max_constraint_interval:取anchor point的采样步长
longitudinal_boundary_bound:纵向距离
max_lateral_boundary_bound:横向距离
min_lateral_boundary_bound:横向距离
curb_shift:与实线的距离(不能压实线)
lateral_buffer:道路边缘的缓冲距离
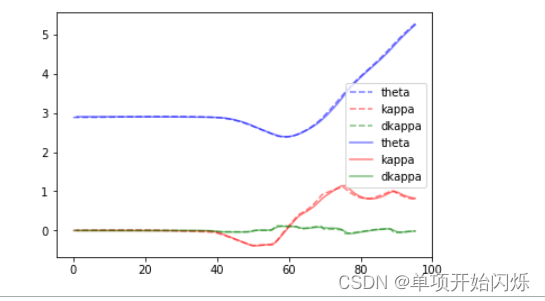
(1)打开jupyter notebook
jupyter notebook
(2)使用modules/tools下的ref_plot.ipynb绘制对比图


















 2804
2804

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









