







 该文详细介绍了如何使用MATLAB进行汽车制动性能的仿真分析,包括制动力分配曲线、利用附着系数与制动强度曲线以及制动效率与附着系数曲线的绘制,展示了不同工况下的汽车制动特性。此外,还探讨了汽车在不同初速度和附着系数下的制动距离关系。
该文详细介绍了如何使用MATLAB进行汽车制动性能的仿真分析,包括制动力分配曲线、利用附着系数与制动强度曲线以及制动效率与附着系数曲线的绘制,展示了不同工况下的汽车制动特性。此外,还探讨了汽车在不同初速度和附着系数下的制动距离关系。
汽车制动性是指汽车行驶时能在短时间内停车且维持行驶方向稳定性和在下长坡时能维持一定车速的能力。从获得尽可能高的行驶安全的观点出发,汽车制动性 评价指标主要有制动效能、制动效能的恒定性和制动时的方向稳定性。
主要任务:
(1)绘制汽车制动力分配曲线
(2)绘制利用附着系数与制动强度曲线
(3)绘制制动效率与附着系数曲线
(4)汽车制动效能仿真
汽车制动性仿真所需参数见表3-1
表3-1 汽车制动性仿真所需参数
| 载荷 | 汽车质量/kg | 汽车质心高度/m | 轴距/m | 质心至前轴距离/m | 质心至后轴萩" |
| 空载 | 1520 | 0. 532 | 2. 705 | 1.082 | 1. 623 、 |
| 满载 | 1910 | 0. 591 | 2. 705 | 1. 488 | 1. 217 |
任务实施过程
1. 绘制汽车制动力分配曲线
汽车制动力分配曲线的MATLAB程序如下。
axis([0 15000 0 9000]) %定义坐标轴范围
Fb1=0:50:15000; %定义x轴范围
g =9.8; %重力加速度
m1 = 1520; %空载汽车质量
m2 = 1910; %满载汽车质量
h1 = 0.532; %空载质心高度
h2 = 0.591; %满载质心高度
b1 =1.623; %空载质心距离后轴的距离
b2 = 1.217;%满载质心距离后轴的距离
L =2.705; %汽车轴距
Fb21 = 0.5*(m1*g/h1*sqrt(b1.^2+4*L*h1/m1/g*Fb1)-(m1*g*b1/h1+2*Fb1)); %计算空载后轮制动力
Fb22 = 0.5*(m2*g/h2*sqrt(b2.^2+4*L*h2/m2/g*Fb1)-(m2*g*b2/h2+2*Fb1)); %计算满载后轮制动力
Fb23 =0.5625*Fb1; %计算前后轮制动力关系
plot(Fb1,Fb21,Fb1,Fb22,Fb1,Fb23); %绘制制动力分配曲线
xlabel('前制动器制动力/N'); %x轴标注
ylabel('后制动器制动力/N'); %y轴标注
text(3200,4500,'I曲线(满载)'),text(6500,2300,'I曲线(空载)'),text(11000,7000,'β线') %对各曲线进行标注运行结果如下图所示:
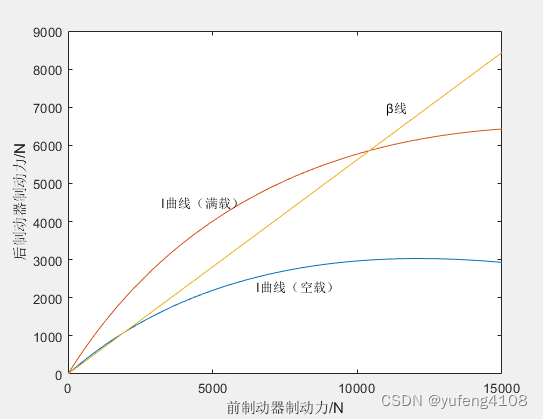
通过上图可以知道,β线与I曲线交点对应的前、后制动器制动力。
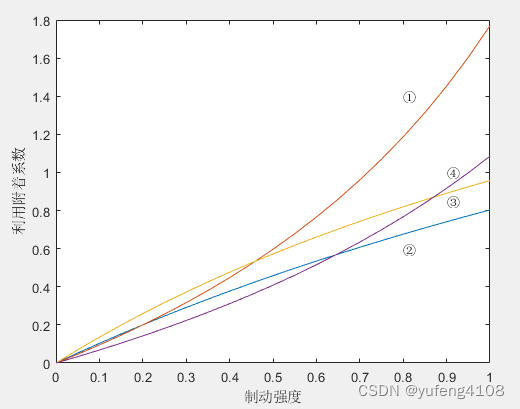
2. 绘制利用附着系数与制动强度曲线
利用附着系数与制动强度曲线的MATLAB程序如下。
axis([0 1 0 2]) %定义坐标轴范围
z=0:0.05:1; %定义X轴范围
h1=0.532; %空载车辆质心高度
a1=1.082; %空载车辆质心距离前轴的距离
b1=1.623; %空载车辆质心距离前轴的距离
L=2.705; %车辆轴距
h2=0.591; %满载车辆质心高度
a2=1.488; %满载车辆质心距离前轴的距离
b2=1.217; %载车辆质心距离前轴的距离
bt=0.64; %前、后制动器制动比例
mf1=bt*L*z./(b1+h1*z); %计算空载前轴利用附着系数
mr1=(1-bt)*L*z./(a1-h1*z); %计算空载后轴利用附着系数
mf2=bt*L*z./(b2+h2*z); %计算满载前轴利用附着系数
mr2=(1-bt)*L*z./(a2-h2*z); %计算满载后轴利用附着系数
plot(z,mf1,z,mr1,z,mf2,z,mr2) %绘制曲线
xlabel('制动强度') %x轴标注
ylabel('利用附着系数')%轴标注
text(0.8,1.4,'①'),text(0.8,0.6,'②'),text(0.9,0.85,'③'), text(0.9,1,05,'④')
%对曲线进行标注运行结果如下图所示:
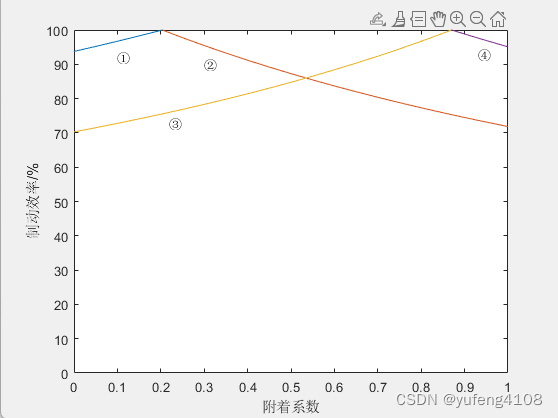
3. 绘制制动效率与附着系数曲线
绘制制动效率与附着系数曲线的MATLAB程序如下。
axis([0 1 0 100]) %定义坐标轴范围
hold on %保存图形
mu=0:0.05:1; %定义x轴范围
h1=0.532;al=1.082;bl=1.623;L=2.705; %汽车变量赋值
h2=0.591;a2=1.488;b2=1.217;bt=0.64; %汽车变量赋值
ef1=bl./(L*bt-mu*h1)*100; %计算空载前轴制动效率
if ef1>100
efl=100;
end
plot(mu,ef1) %绘制空载前轴制动效率曲线
erl=al./(L-L*bt+mu*h1)*100; %计算空载后轴制动效率
if erl>100
er1=100;
end
plot(mu,erl) %绘制空载后轴制动效率曲线
ef2=b2./(L*bt-mu*h2)* 100; %计算满载前轴制动效率
if ef2>100
ef2=100;
end
plot(mu,ef2) %绘制满载前轴制动效率曲线
er2=a2./(L-L*bt+mu*h2)*100; %计算满载后轴制动效率
if er2>100
er2=100;
end
plot(mu,er2) %绘制满载后轴制动效率曲线
box on %设置图形边框
xlabel('附着系数') %x轴标注
ylabel('制动效率/%') %y轴标注
text(0.1,92,'①'),text(0.3,90,'②'),text(0.22,73, '③ '), text(0.93,93,'④') %对各曲线进行标注运行结果如下图所示:
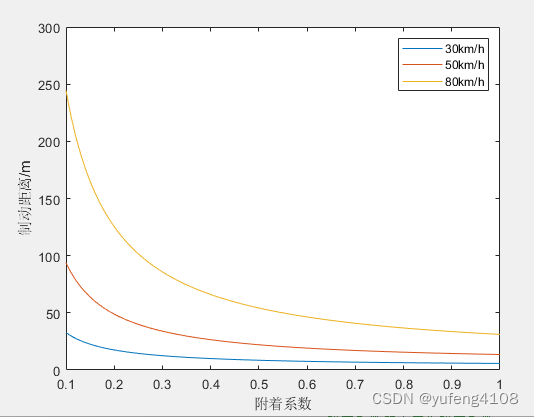
4.汽车制动效能仿真
绘制汽车在不同初速度下的制动距离与附着系数关系曲线的MATLAB程序如下。
h1=0.591;L=2.705;a=1.488;b=1.217;bt=0.64;g=9.8; %汽车变量赋值
t1=0.1;t2=0.3; %时间参数赋值
mu0=(L*bt-b)/h1; %计算同步附着系数
mu=0.01:0.01:1; %定义x轴变化范围设置
u0=[30 50 80]; %汽车制动初速度
for i=1:3 %循环开始
t2p=(1-bt).*(b+h1*mu).*t2./(bt.*(a-h1.*mu)); %计算前轮抱死时间
for j=1:1:100 %循环开始
if mu(j)<mu0 %附着系数小于同步附着
u21(j)=u0(i)./3.6-g.*mu0.*(t2p(j).^2)./(2. * t2)-g.*b.* mu(j).*(t2-t2p(j))./(L-h1.* mu(j))-g.* L.* mu0.*(1-bt).*(t2^2-t2p(j).^2)./(2.*(L-h1.*mu(j)).*t2);%计算后轮抱死时刻的遗度
S1(j)=u0(i).*(t1+t2)./3.6-g.*mu0.*(t2p(j).^2).*(1-2.* t2p(j)./(3.*t2))./2-g.* b.* mu(j).*((t2-t2p(j)).^2)./(2.*(L-h1.* mu(j)))-g.* L.* mu0.*(1-bt).*(t2^3-3.* t2.* t2p(j).^2+2.* t2p(j).^3)./(6.* (L-h1.* mu(j)).* t2)+u21(j).^2/(2.* g.*mu(j)); %计算制动距离
elseif(j)==mu0 %附着系数等于同步附着系数
u21(j)=u0(i)./3.6-g.*mu0.*t2./2.; %计算前、后轮抱死时刻速度
S1(j)=u0(i).*(t1+t2)./3.6-g.*mu0.*(t2.^2)./6+u21(j).^2. /(2.*g.*mu(j)); % 计算制动距离
elseif mu(j)>mu0 %附着系数大于同步附着系数
u21(j)=u0(i)./3.6-g.*mu0.*(t2p(j).^2)./(2.*t2)-g.*a.*mu(j).*(t2-t2p(j))./(L+h1.*mu(j))-g.*L.*mu0.*bt.*(t2^2-t2p(j).^2)./(2.*(L+h1.*mu(j)).*t2); %计算前轮抱死时刻速度
S1(j)=u0(i).*(t1+t2)./3.6-g.*mu0.*(t2p(j).^2).*(1-2.*t2p(j)./(3.*t2))./2-g.*a.*mu(j).*((t2-t2p(j)).^2)./(2.*(L+h1.*mu(j)))-g.*L.*mu0.*bt.*(t2^3-3.*t2.* t2p(j).^2+2.*t2p(j).^3)./(6.*(L+h1.* mu(j)).* t2)+ u21(j).^2./(2.* g.* mu(j)); %计算制动距离
end % 循环结束
end %循环结束
axis([0.1 1 0 300]) %设置坐标轴大小
plot(mu,S1) % 绘制制动距离与附着系数曲线
hold on %保持图形
end %循环结束
xlabel('附着系数') %x轴标注
ylabel('制动距离/m') %y轴标注
legend('30km/h','50km/h','80km/h') %对各曲线进行标注 运行结果如下图所示:
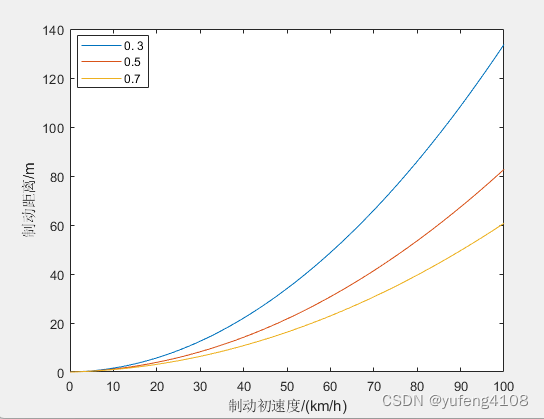
绘制汽车在不同附着系数下的制动距离与制动初速度的关系曲线的MATLAB程序如下。
h1=0.591;L=2.705;a=1488;b-1.217;bt=0.64;g=9.8; %汽车变量赋值
t1=0.1;t2=0.3; %时间参数赋值
mu0=(L*bt-b)/h1; %计算同步附着系数
u0=0:1:100; %定义速度变化范围
mu=[0.3 0.5 0.7]; %设置附着系数
for i=1:3 %循环开始
t2p=(1-bt)*(b+h1*mu(i))*t2/(bt*(a-h1*mu(i))); %计算前轮抱死时间
u21=u0/3.6-g*mu0*(t2p^2)./(2*t2)-g * b* mu(i) * (t2-t2p)./(L-h1*mu(i))-g*L*mu0*(1-bt)*(t2^2-t2p^2)./(2*(L-h1*mu(i))* t2); %计算后轮抱死时刻的速度
S1=u0*(t1+t2)/3.6-g*mu0*t2p^2*(1-2*t2p/(3*t2))/2-g*b*mu(i)*(t2-t2p)^2./(2*(L-h1*mu(i)))-g*L*mu0*(1-bt)*(t2^3-3*t2*t2p^2+2*t2p^3)./(6*(L-h1*mu(i))* t2)+u21.^2/(2*g*mu(i)); %计算制动距离
axis([0 100 0 140]) % 定义坐标轴大小
plot(u0,S1) %绘制制动距离与制动初速度田
hold on %保存图形
end %循环结束
xlabel('制动初速度/(km/h)') %设置x坐标轴的名称
ylabel('制动距离/m') %设置y坐标轴的名称
legend('0. 3','0.5','0.7') %对各曲线进行标注运行结果如下图所示:

















 6592
6592

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









