







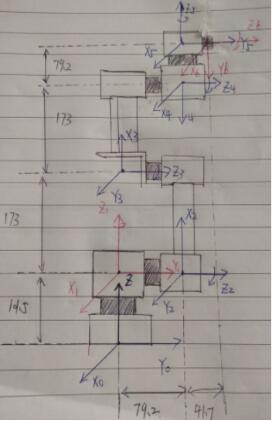
模型选用的是类似长得与UR5机械臂样子的GLUON_6L3机械臂,如下图



下面的程序是基于matlab2020b版本编写,机器人工具箱9.10。不一定要求你们的版本与我的一样,只是有的太低版本可能运行不了,再此说明一下。
pc配置:AMD5800 16G RTX3060 运行需要大概3分钟左右。如果你的电脑运行一直定住等等就行,不知道为什么运行这么慢。换成米制的时候,运行会很快。
clear;clc;close all;
% DH建模部分theta、 d、 a、 alpha
L(1)=Link([ 0, 1015, 0, 0],‘modified’);
L(2)=Link([ 0, 79.2, 0, -pi/2],‘modified’);
L(3)=Link([ 0, -79.2, 173, 0],‘modified’);
L(4)=Link([ 0, 79.2, 173, 0],‘modified’);
L(5)=Link([ 0, 79.2, 0, pi/2],‘modified’);
L(6)=Link([ 0, 41.7, 0, -pi/2],‘modified’);
L(2).offset=-pi/2; %设定关节变量偏移量
L(4).offset=pi/2;
robot= SerialLink(L, ‘name’, ‘GLUON_6L3’); %建立机械臂模型
figure(1)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











