






0. 论文信息
标题:SoMaSLAM: 2D Graph SLAM for Sparse Range Sensing with Soft Manhattan World Constraints
作者:Jeahn Han, Zichao Hu, Seonmo Yang, Minji Kim, Pyojin Kim
机构:Gwangju Institute of Science and Technology、University of Texas at Austin
原文链接:https://arxiv.org/abs/2409.15736
1. 摘要
我们提出了一种用于稀疏距离感测的图SLAM算法,该算法结合了利用地标-地标约束的软曼哈顿世界。稀疏距离感测对于微型机器人来说是必要的,微型机器人没有使用笨重和昂贵的传感器的奢侈。处理稀疏距离感测的现有SLAM方法缺乏准确性,并且由于对数据点的有限访问而随着时间积累漂移误差。使用结构规则来掩盖这一缺陷的算法,如曼哈顿世界(MW),在绘制与规则不一致的真实世界环境时有缺点。我们提出了SoMaSLAM,这是一个2D图SLAM,专为具有稀疏距离感知的微型机器人设计。我们的方法有效地映射稀疏范围数据,而不强制执行严格的结构规则,并保持自适应图。我们将MW假设实现为软约束,我们称之为软曼哈顿世界。我们提出了新的软界标-界标约束来将软MW合并到图SLAM中。通过大量的评估,我们证明了我们提出的SoMaSLAM方法提高了在不同数据集上的定位精度,并且足够灵活,可以在现实世界中使用。
2. 引言
距离传感器是在同时定位与地图构建(SLAM)中最有效的传感器之一,用于精确识别周围环境。
尽管诸如Velodyne VLP-16等重量大、体积庞大且价格昂贵的距离传感器非常精确且可靠,但它们有时并不适用于特定场景。像Crazyflie 2.1这样手掌大小的微型机器人,由于其有效载荷有限(最大承重为15克),无法使用这些距离传感器。在这些情况下,为了使用轻量级距离传感器,牺牲准确性和距离感知点的数量是合理的,这导致了稀疏距离感知问题。
稀疏距离感知严重限制了距离数据的获取,意味着现有的未针对该问题定制的SLAM方法因信息不足而无法正常工作。一些先前的工作尝试在粒子滤波器和位姿图SLAM框架内克服有限的距离感知能力来应对这一挑战。尽管做出了这些努力,但漂移误差会随时间累积,且上述方法并未利用重复的结构规律性。
一些SLAM方法整合了结构规律性,如曼哈顿世界(MW)模型,其中所有平面必须彼此平行或正交。这些算法通过有效利用室内结构模式来抵消漂移误差,并持续产生准确结果,但当预设的结构模型被破坏时就会失效。一扇开着的门或一张放错位置的桌子就足以破坏曼哈顿世界的规则条件。其他结构模型,如亚特兰大世界(Atlanta world)模型或曼哈顿框架的混合模型,提供了更多的灵活性。然而,在使用结构规律性的情况下,所有特征都必须遵守强制性规则这一事实,使得SLAM算法在使用真实世界数据集时容易失败。
为解决这些问题,我们提出了SoMaSLAM,这是一种新颖的2D图SLAM方法,用于稀疏距离感知,它利用结构规律性,扩展了先前的2D图SLAM方法,以在结构化环境中实现更准确和一致的性能。特别是,我们在位姿图优化(PGO)中制定了目标函数,该函数鼓励(而非强制)附近的墙壁彼此正交或平行。我们提出了新的软约束,称为软曼哈顿世界(MW),在地标之间不存在硬约束。
3. 效果展示
我们在图SLAM中的软MW方法允许在结构化环境中具有更多的灵活性,并将地图塑造成最能满足所有条件的版本,如图1所示。


4. 主要贡献
我们的主要贡献如下:
• 我们利用人造环境中的结构规律性来解决位姿图SLAM框架中的稀疏距离感知问题。
• 我们提出了基于PGO的软MW上的新软地标-地标约束,从而在结构化环境中提供了更多的灵活性。
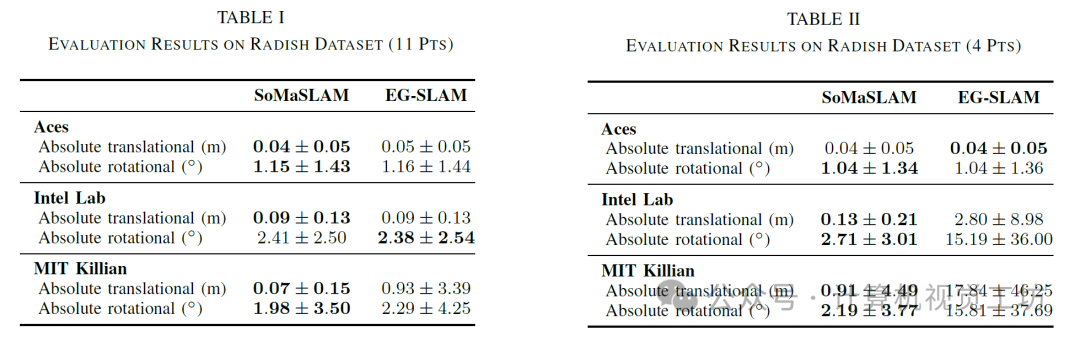
• 我们在作者收集和公开的Radish数据集上对提出的SoMaSLAM进行了评估,并与其他最先进的SLAM方法进行了比较。我们还公开了作者收集的数据集和代码。
据我们所知,这是第一个在位标之间采用软约束的2D图SLAM,其灵感来自软MW假设,该假设可以被违反,但在PGO的目标函数中违反软约束会产生惩罚。
5. 方法
6. 实验结果
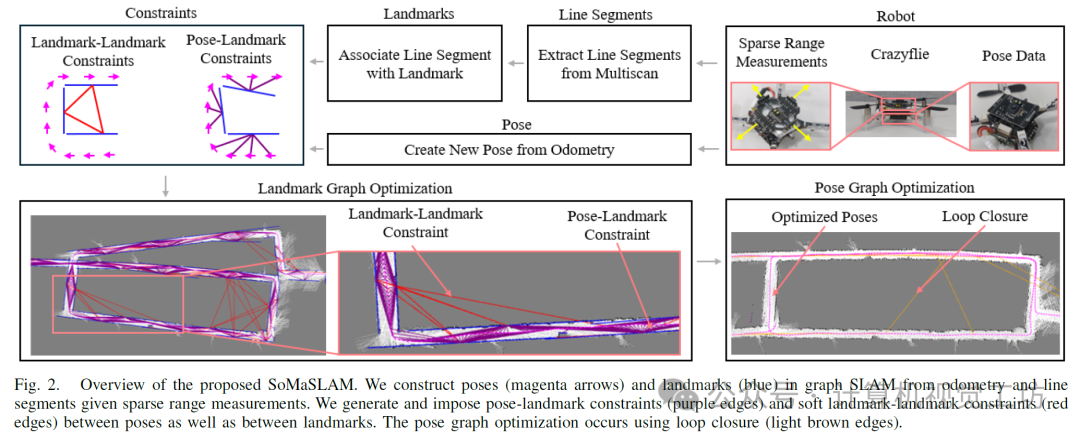
我们根据稀疏测距数据提供的里程计和线段信息,在图SLAM(Simultaneous Localization and Mapping,同步定位与地图构建)中构建了位姿(品红色箭头)和地标(蓝色)。我们在位姿之间以及地标之间生成并施加位姿-地标约束(紫色边)和软地标-地标约束(红色边)。位姿图优化是通过回环闭合(浅棕色边)来实现的。

7. 总结 & 未来工作
我们在图SLAM中引入了两个新颖的概念:软地标-地标约束和软曼哈顿世界(Manhattan World,MW)假设。我们展示了新方法如何通过稀疏感知提升图SLAM的准确性,并且与使用严格的结构规律性相比,提供了更高的灵活性。在未来的工作中,我们希望利用多架无人机来有效解决稀疏感知问题。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~

















 126
126

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









