







2022-12-7使用VMware安装Ubuntu18.04环境以及ROS的过程记录
VMware版本: VMware-workstation-full-16.2.4-20089737.exe
Ubuntu版本:ubuntu-18.04.6-desktop-amd64.iso
Ubuntu系统的安装
最开始使用的是VirtualBox(VirtualBox-7.0.4-154605-Win.exe)安装完Ubuntu后存在terminal无法打开,系统频繁卡顿的问题。使用的笔记本为Lenovo Y9000K 2021H(该款笔记本驱动较为特殊,使用Windows 10系统默认驱动存在冲突的问题,需要到官网安装对应驱动),不知是否为个例。改换成VMware重新安装Ubuntu镜像后,该现象消失。
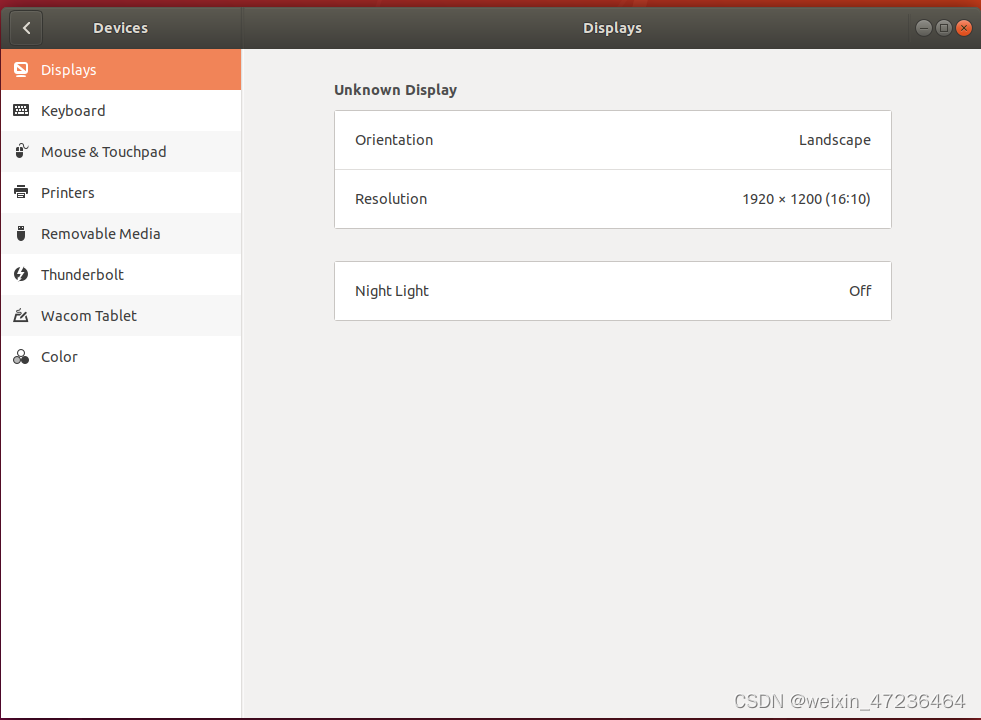
显示分辨率
找到settings
settings-Devices-Displays
换源
启动software updater
在settings弹出的对话框中进行设置
点击选择最佳服务器,测试完成后会自动选择最优链接

取消Unsupported updates
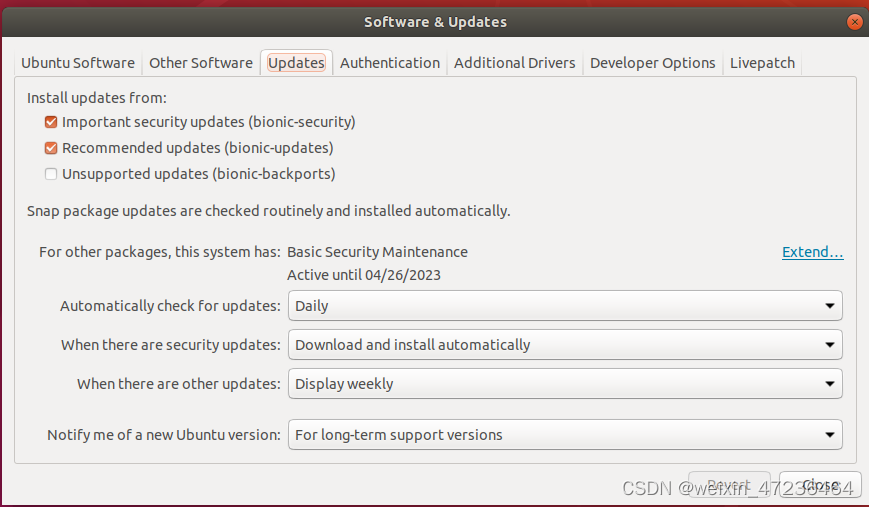
reload,重新载入软件包列表

检查并更新软件:
终端依次输入以下两个命令:
sudo apt-get update
sudo apt-get upgrade下载安装ROS
设置ROS软件源
终端中输入以下命令
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
注: 有更换源地址以提高下载速度的,具体如下
为了快速下载,我们使用中科大(USTC)的ROS软件源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'这两个命令的不同在于下载的网址:
一个是:http://packages.ros.org
另一个是:http://mirrors.ustc.edu.cn
我这里未进行更换,敲入命令后,输入密码生效

设置密钥
这一步没有完全理解,对其他人的步骤进行了照搬
刚开始输入的以下命令
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
未能执行成功

后改为了下列命令
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
执行成功

感觉是替换了key的值,可能是第一次的key值失效?
检查并更新软件
注意:此处必须update一下,否则会显示找不到ros包!
sudo apt update
执行成功
ROS桌面完整版安装
ros安装包选择似乎还比较多

在不同来源处看到了kinect、melodic、noetic等字样的后缀,后了解为ROS1的不同版本,kinect版本最早,目前已不多见。melodic适配Ubuntu 18.04,noetic专为Ubuntu 20.04设计 。
由于安装的为Ubuntu 18.04,因此选择melodic版本安装
sudo apt install ros-melodic-desktop-full
提示需要下载534MB的文件,安装需要占用2403MB,敲入Y执行
下载过程还是很快的
下载完成后自动进入安装步骤
设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source .bashrc

$ source 是编译环境变量
初始化rosdep:
ros包有两个不同类型的依赖项:build依赖项和run依赖项。rosdep就是用来检查包的丢失依赖项,并且完成下载和安装。
sudo rosdep init
rosdep update在执行update时遇到网络连接的问题

应该是国内连接外网(raw.githubusercontent.com)受限的原因,导致下载部分文件出现time out问题
更换国内镜像源
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py将上述三个文件中的 “raw.githubusercontent.com/ros/rosdistro/master” 替换为国内镜像网址“gitee.com/ssonic/rosdistro/raw/master”
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py将源代码中如下形式:
DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'更改为:
DEFAULT_INDEX_URL = 'https://gitee.com/ssonic/rosdistro/raw/master/index-v4.yaml'更改完全部文件后,将原来的20-default.list文件删除
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list再重新执行sudo rosdep init
sudo rosdep init
rosdep update问题得到解决

构建包依赖关系
rosinstall是一个常用的命令行工具,使您可以通过一个命令轻松下载ROS软件包的许多源代码树,有助于开发者更好使用ROS系统里的功能。
安装rosinstall:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential


加载环境设置文件
source /opt/ros/melodic/setup.bash创建并初始化工作目录
ROS使用一个名为catkin的ROS专用构建系统。为了使用它,用户需要创建并初始化
catkin工作目录,如下所示。除非用户创建新的工作目录,否则此设置只需设置一次。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
目前,只有src目录和CMakeLists.txt文件在catkin工作目录中,使用catkin_make命令来构建
cd ~/catkin_ws/
catkin_make测试ROS是否安装
在终端中输入以下命令,初始化ROS环境:
roscore
会显示一些版本信息,以及内存缓存是否大于1 G 的这种信息(内存大于1G需要清理缓存)
运行小海龟
在“roscore”已经在运行的前提下,新开一个终端,输入:
rosrun turtlesim turtlesim_node
会看到ROS生产了一个小海龟,如下:

再新开一个终端,输入:
rosrun turtlesim turtle_teleop_key
在当前终端,使用键盘方向键输入,可以控制小海龟运动。
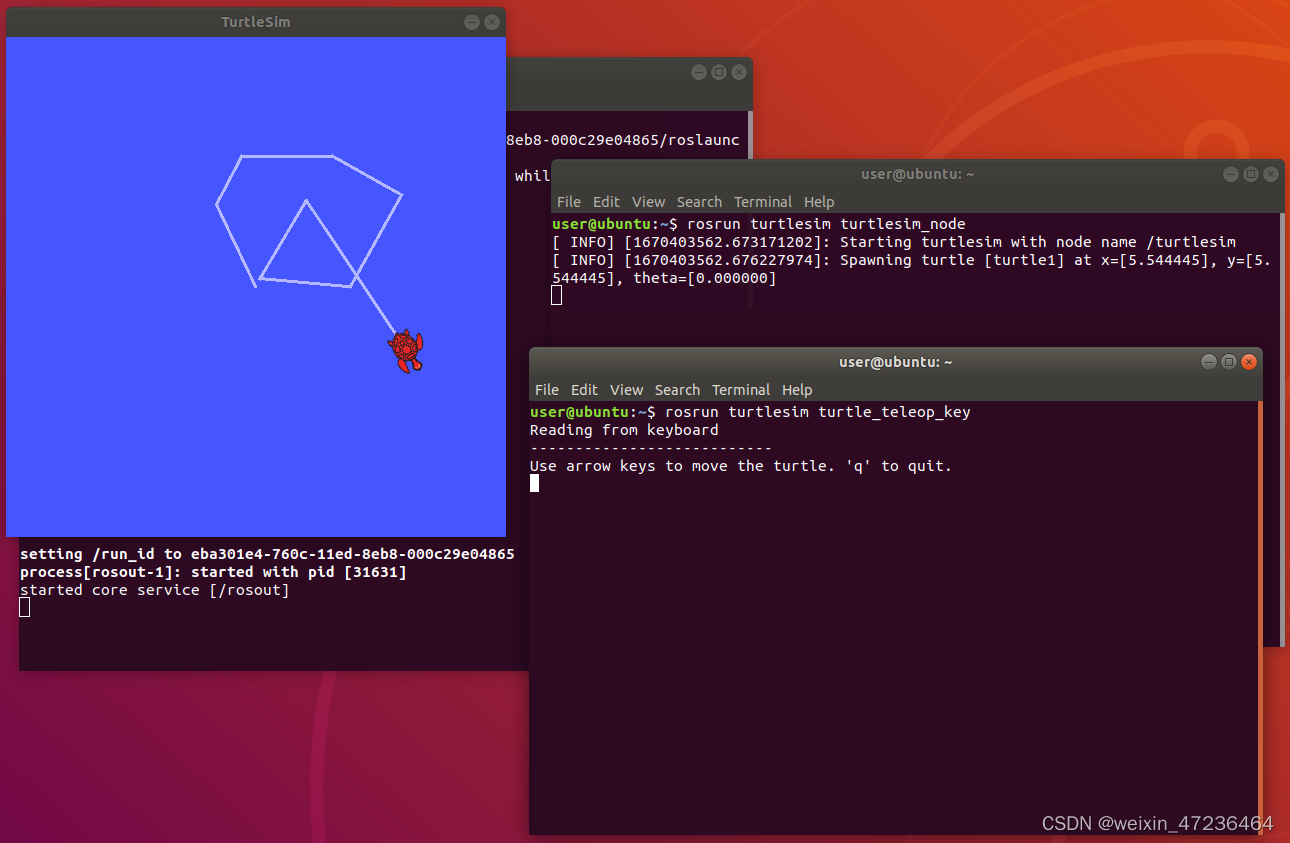
至此,ROS安装完成
更新
在安装完成后发现了一份自动安装教程,将链接附上,供参考
自动安装
发现一份自动安装命令
wget http://fishros.com/install -O fishros
bash fishros相关教程
001导论_Chapter1-ROS概述与环境搭建_哔哩哔哩_bilibili
ROS入门教程-理论与实践 - 第一章ROS概述与环境 - 知乎 (zhihu.com)
参考链接
如何在VMware上快速安装ROS_养牛青年的博客-CSDN博客_vmware安装ros
在VM12虚拟机+安装Ubuntu18.04+搭建ROS系统教程(超详细图文)——含各种避坑tips_小池澈平的博客-CSDN博客是















 3374
3374











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









