






录制数据包雷达相机录制数据包
roscore播放数据包
rosbag play ceshi_2024-02-28-16-03-21.bag /ouster/points:=/points_raw
ouster/points为自己的话题名,calibration_toolkit有自己写好的话题名points_raw,否则看不到点云。
在标定工具工作空间calib下打开终端,执行
source devel/setup.bash
rosrun calibration_camera_lidar calibration_toolkit
修改参数(以下是我的参数)
 关闭窗口重新打开标定工具
关闭窗口重新打开标定工具
点击点云窗口,按2即可出现点云,通过下面的方法来调整点云
1.右侧数字小键盘中“上”,“下”,“左”,“右”,“PgUp”以及“PgDn”这六个按键用于平移激光点云。
2.a、d、w、s、q、e用来旋转激光点云。
3.数字“1”,“2”用来设置是perspective projection透视投影还是orthogonal projection正交投影。
4.用“o”,“p”控制点云的大小,o变小,p变粗。
5.用“-”,“+”控制放大,缩小。
6.b可调整点云背景颜色按 Grab抓取帧,并用左键将红色圆圈放在标定板点云上,右键取消,多抓取几帧
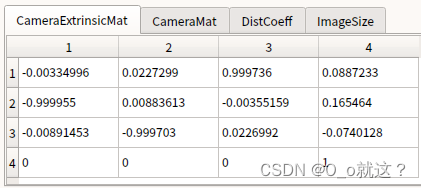
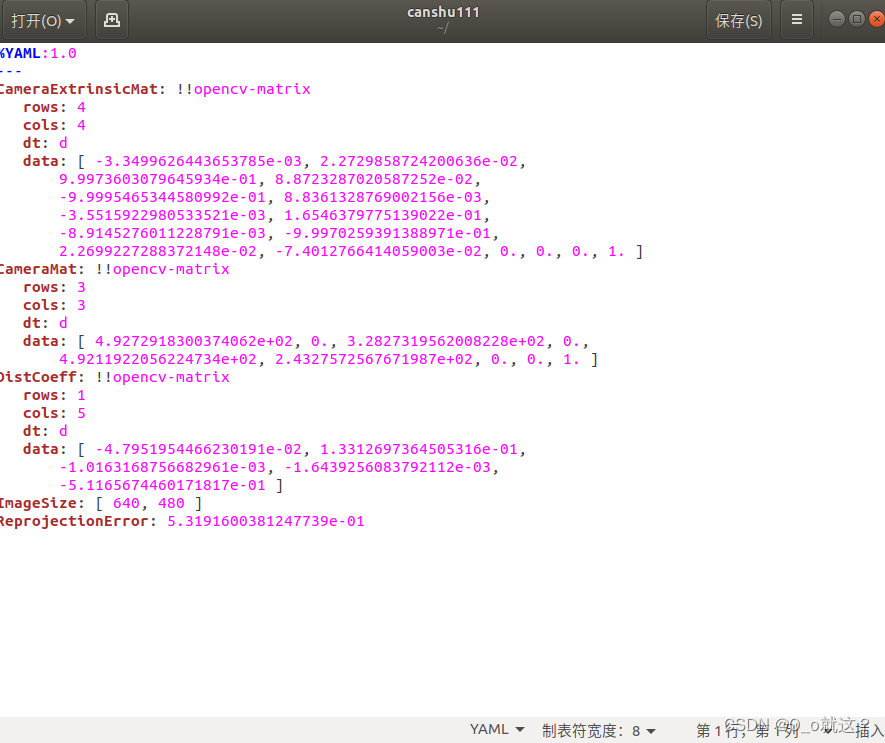
点击Calibrate进行标定,外参矩阵如下
点击Project
点击save
选择保存路径和名称,以下两个窗口都选NO
保存成功
参考文章:















 3097
3097











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









