






安装ROS
上一次已经在Ubuntu18.04下安装好了ROS,需要的可以参考
一、下载外参标定包
打开终端,创建自己的工作空间
mkdir -p ~/calib/src 遇到错误一:cmake版本不适配问题
解决方法:不要卸载nlopt,直接安装新版本,具体步骤可以看这个文章,亲测有效,使用wget方法对我来说有点慢,我是直接去官网下。
将所下载的压缩包放在 /calib/src 下,然后在/calib下进行catkin_make编译
或者ros包直接在终端里下载
cd ~/calib/src
git clone https://github.com/JunzWu/Autoware_Calibration_Camera_Lidar然后编译
cd ~/calib
catkin_make
source devel/setup.bash遇到错误二:如果在编译的过程中遇到了下面的问题
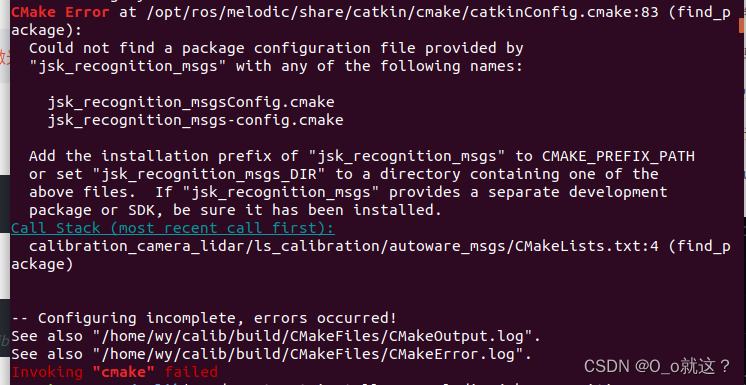
解决方法:可以使用以下命令,这是我其中一次遇到的问题
sudo apt-get install ros-melodic-jsk-recognition-msgs
遇到错误三:
rosrun calibration_camera_lidar calibration_toolkit
[rosrun] Couldn't find executable named calibration_toolkit below /home/wy/calib/src/calibration_camera_lidar/ls_calibration/calibration_camera_lidar
[rosrun] Found the following, but they're either not files,
[rosrun] or not executable:
[rosrun] /home/wy/calib/src/calibration_camera_lidar/ls_calibration/calibration_camera_lidar/nodes/calibration_toolkit
解决方法:参考 https://github.com/XidianLemon/calibration_camera_lidar/issues/7
然后再进行
source devel/setup.bash二、启动标定工具包
打开一个新的终端窗口
roscore返回原来的终端窗口
rosrun calibration_camera_lidar calibration_toolkit
遇到错误四:
rosrun calibration_camera_lidar calibration_toolkit
/home/wy/calib/devel/lib/calibration_camera_lidar/calibration_toolkit: error while loading shared libraries: libnlopt.so.0: cannot open shared object file: No such file or directory
解决方法:
cd /etc/ld.so.conf.d sudo touch libnlopt.conf
sudo gedit libnlopt.conf
在libnlopt.conf文件中添加内容为:/usr/local/lib,
最后使配置生效:
sudo ldconfig再次运行
rosrun calibration_camera_lidar calibration_toolkit成功出现以下窗口,则安装成功















 1395
1395











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









