







一.预备知识
1. 工具坐标
引入:假设我们有个机器人,在他上面有个工具刀片要通过机器人控制这个刀片来加工工件,一般机器人末端的工具坐标中心都在法兰盘中心,因此我们搞不好就撞到了工件。
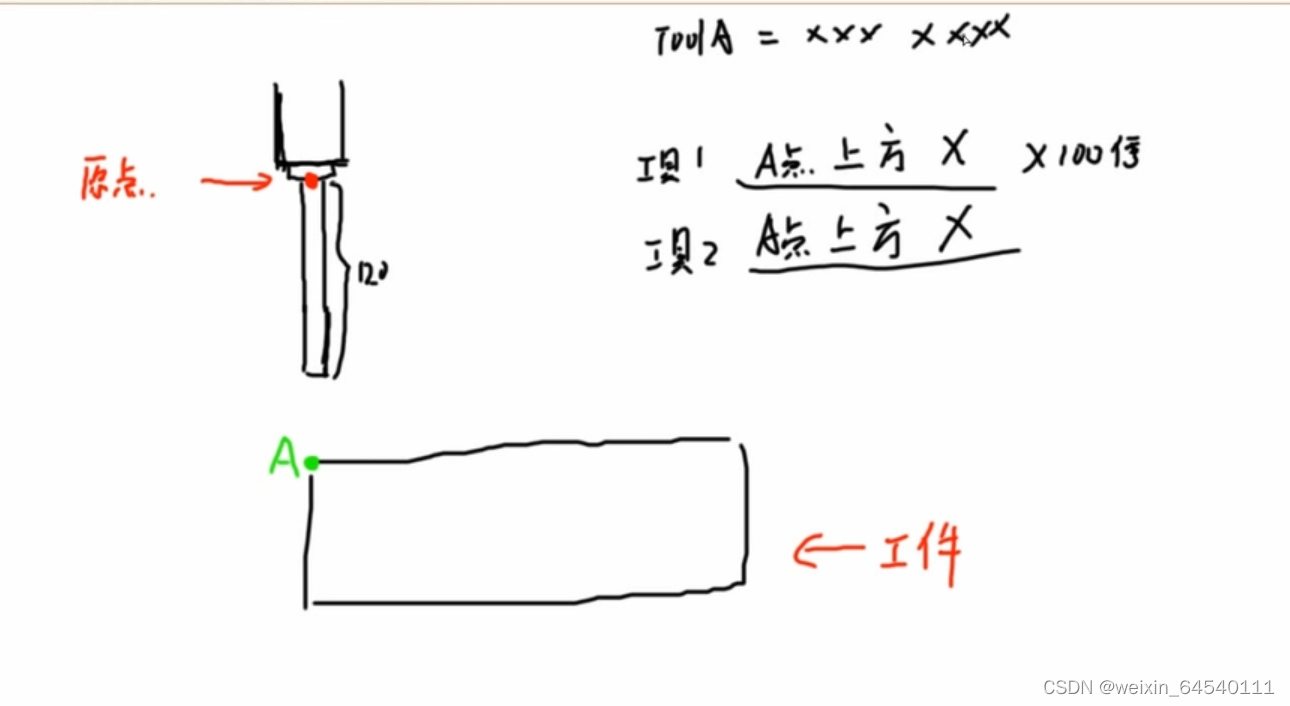
如果是默认的末端执行器工具坐标的话,那样原点与A点重合,即相撞,因此我们引入工具坐标的概念。
2.工件坐标
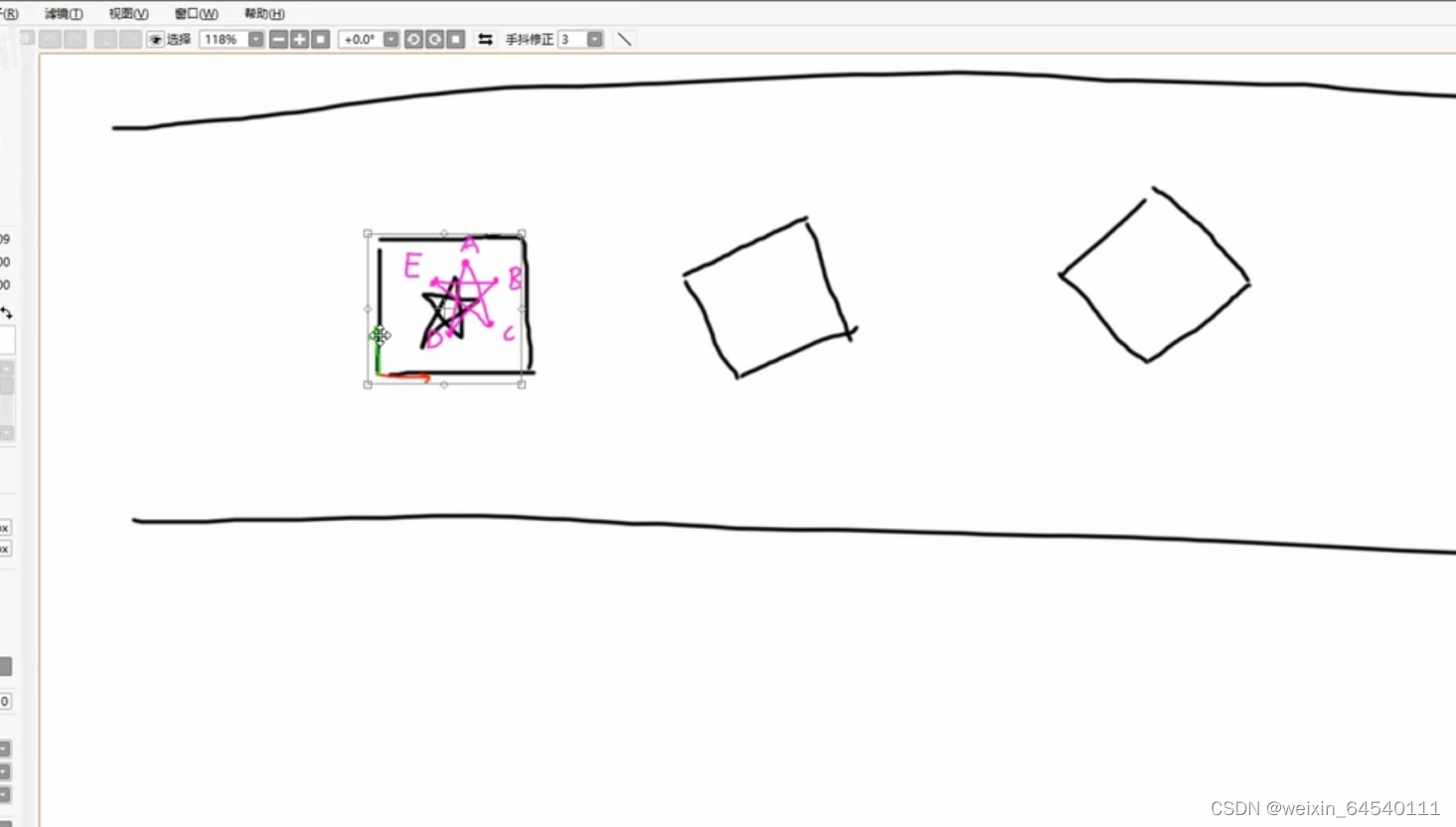
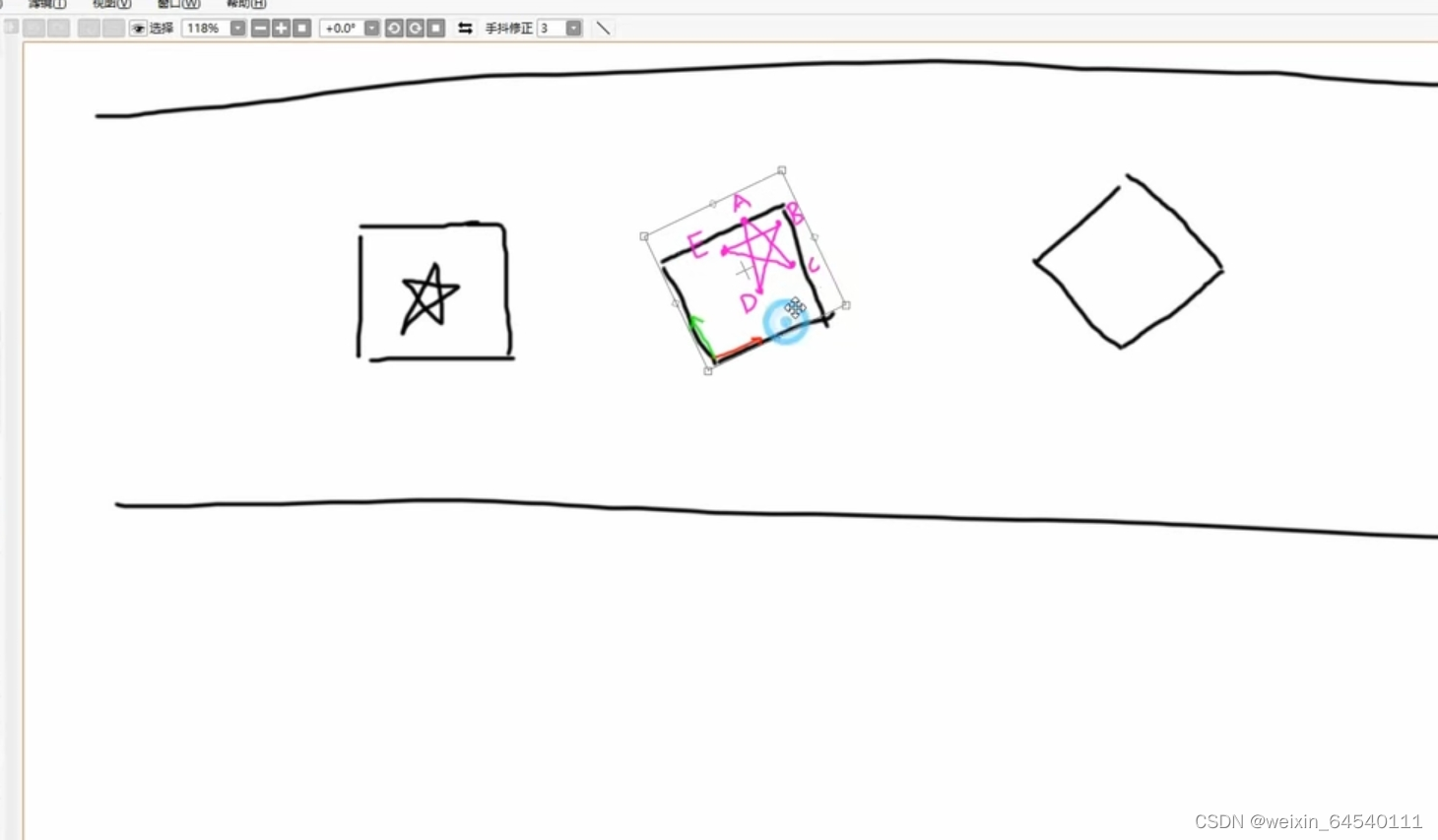
图解:任务根据坐标系而调节,比如我们要在正方体上画五角星,那么怎么完成勒?

不同的工件坐标:
3.smart组件与机器人的关系
图解:
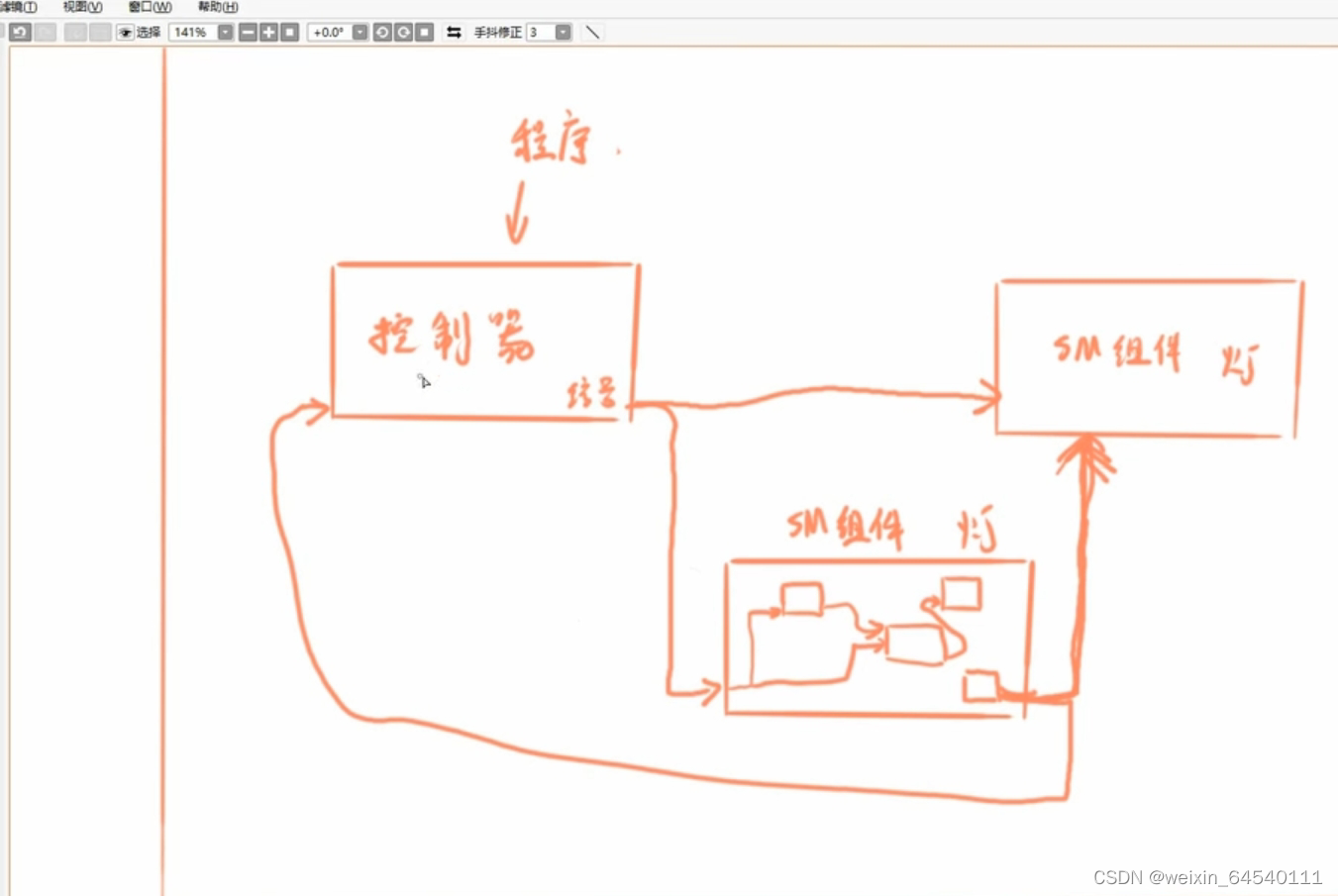
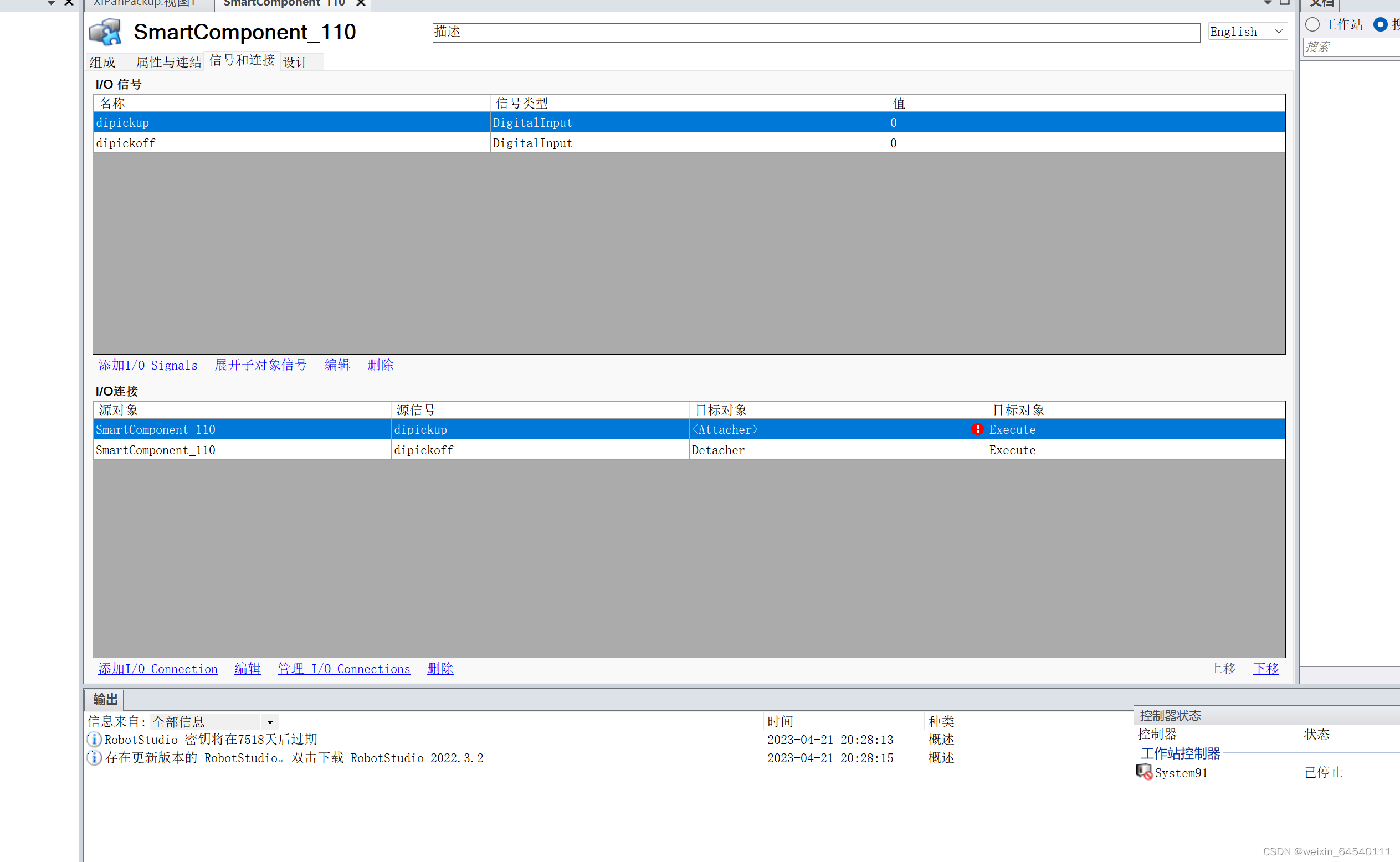
机器人工作完成任务首先通过控制器运行程序,程序里面有信号,通过输入到smart组件里的信号来建立控制器与smart组件的联系。
图中箭头代表信号
4.初步了解信号与属性
4.1信号
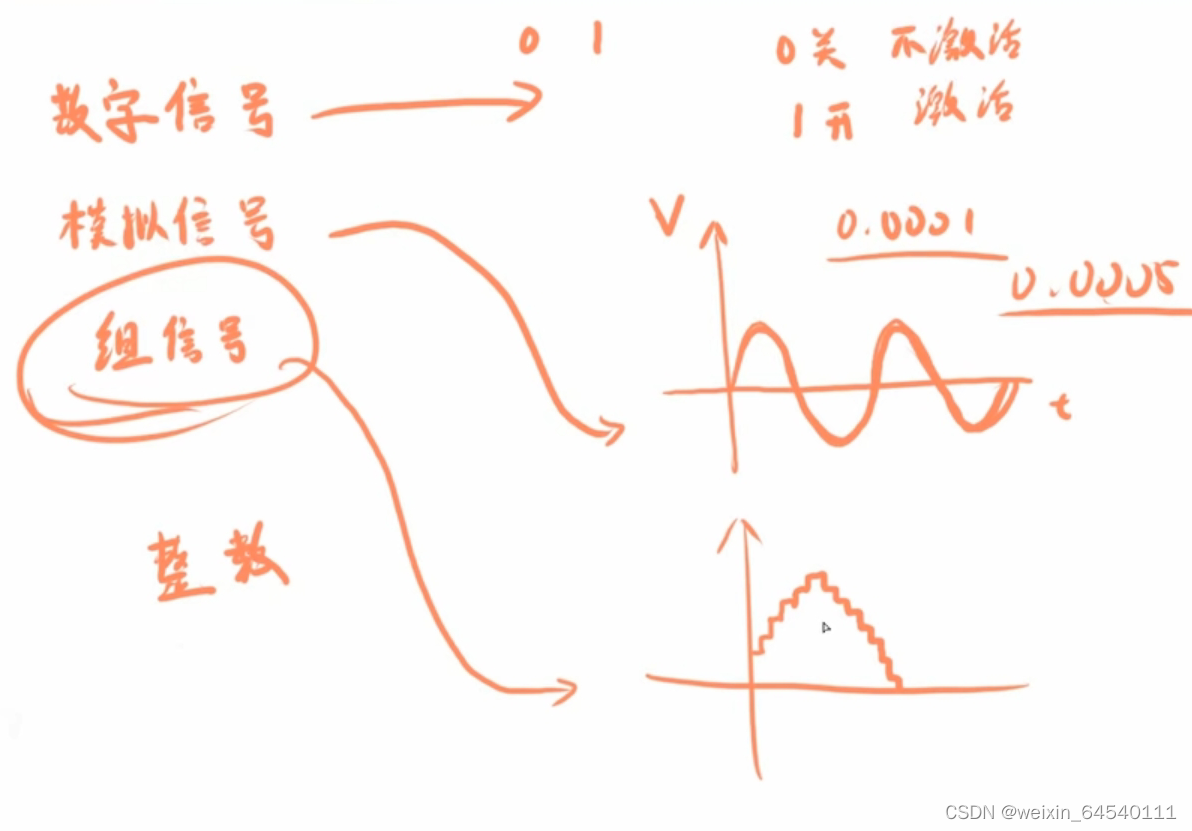
信号有三类:数字(01),模拟,组合(整数)
4.2.属性
信号可以激活smart组件,但是有些信息不变用数字信号传输时,我们就使用了属性。
举例:
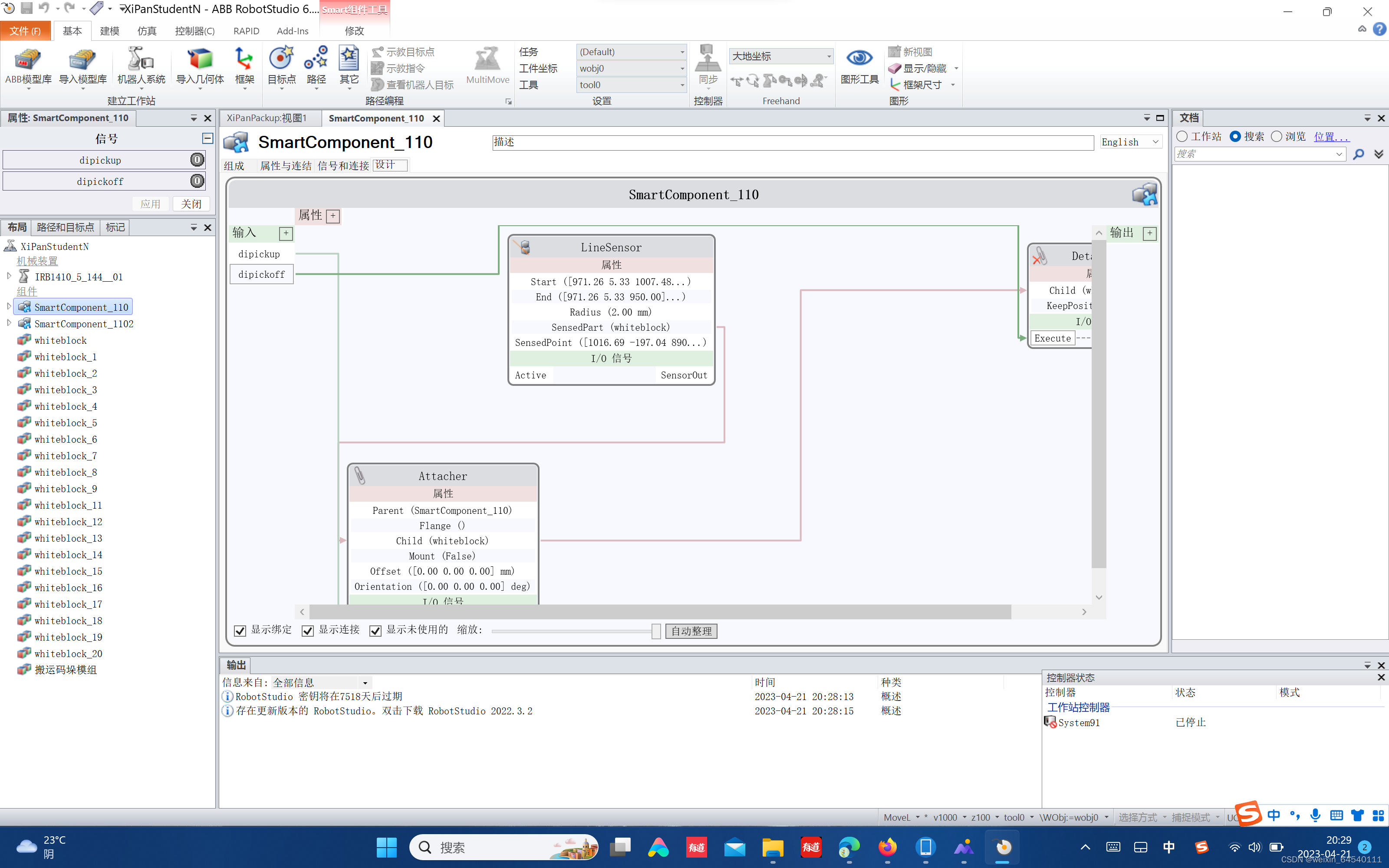
通过线传感器属性传递信息给隐藏组件来隐藏部件的
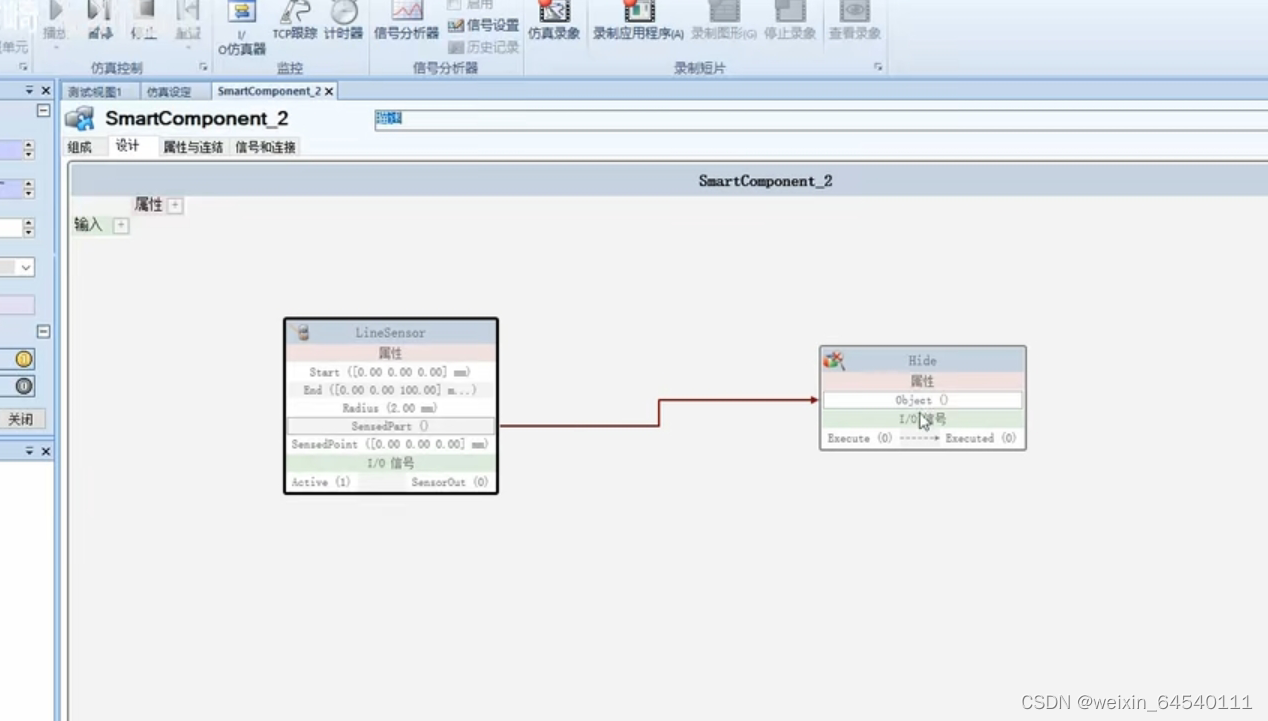
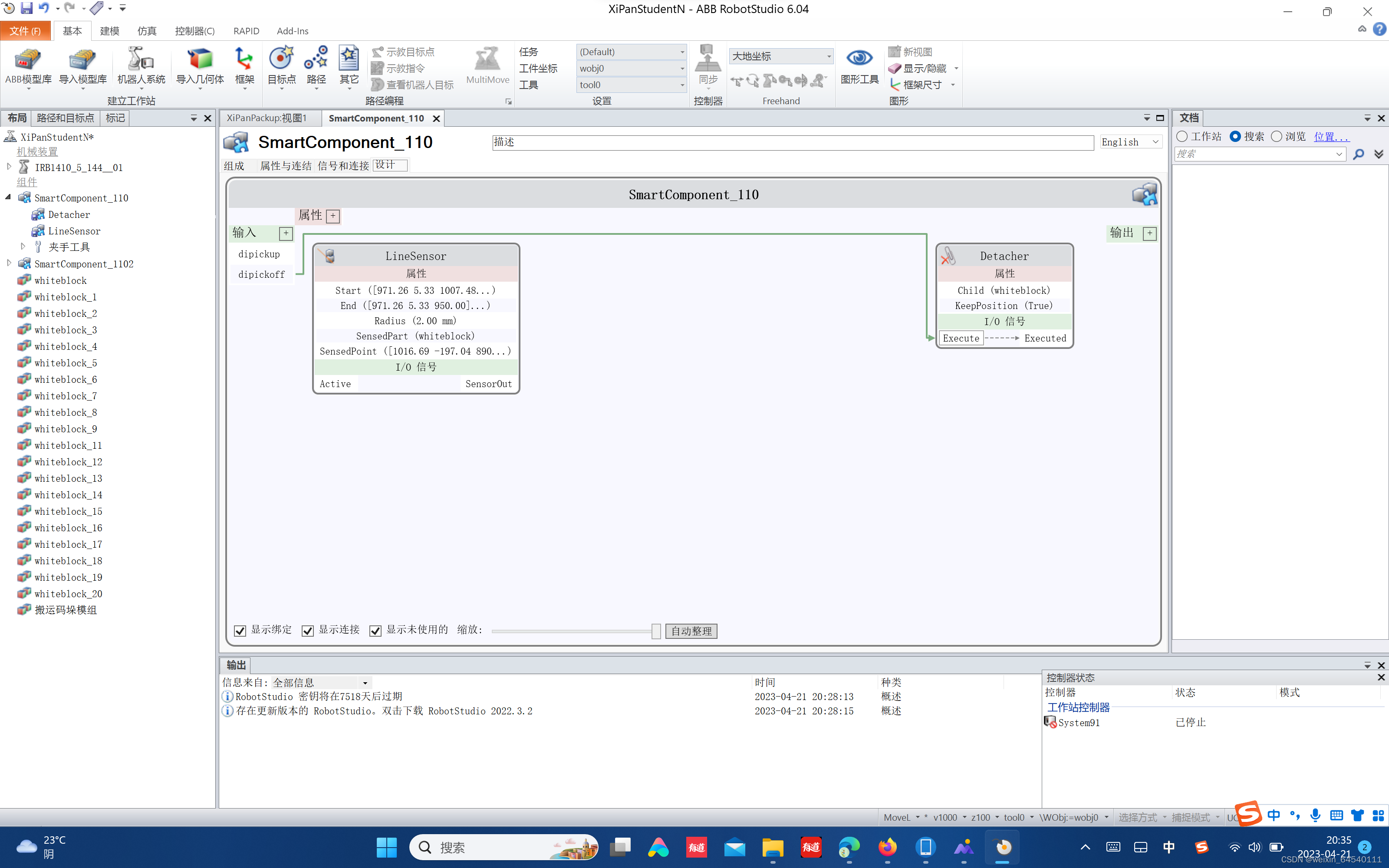
线传感器介绍:
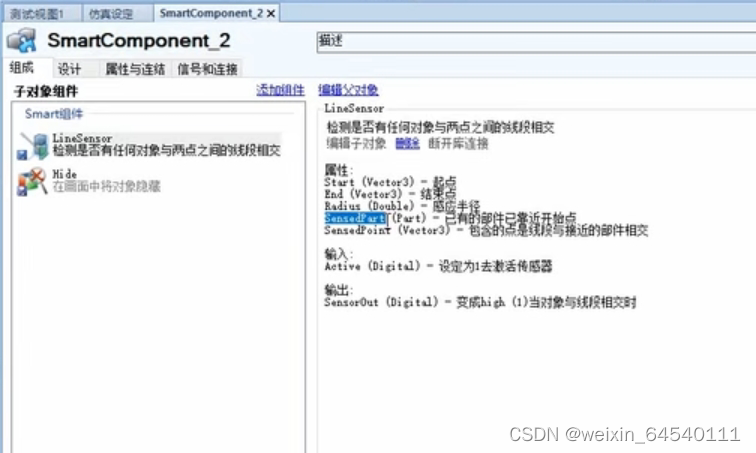
倒数第二个参数说人话就是把感应到的部件名称信息输出出去,输出到隐藏组件的目标里面。
5.smart组件设计时要注意的问题
1.同一父对象下不能有相同的属性名与信号名字
2.smart组件可以模块化
3.当我们在设计里面删除某些组件时,信号与连接里面并不会自动删除,要手动选中然后去其他选项卡,然后在回到连接才能删除。
假如我们发现我们的smart组件设计的不对,我们要进行修改删除,我们会发现会出一些问题
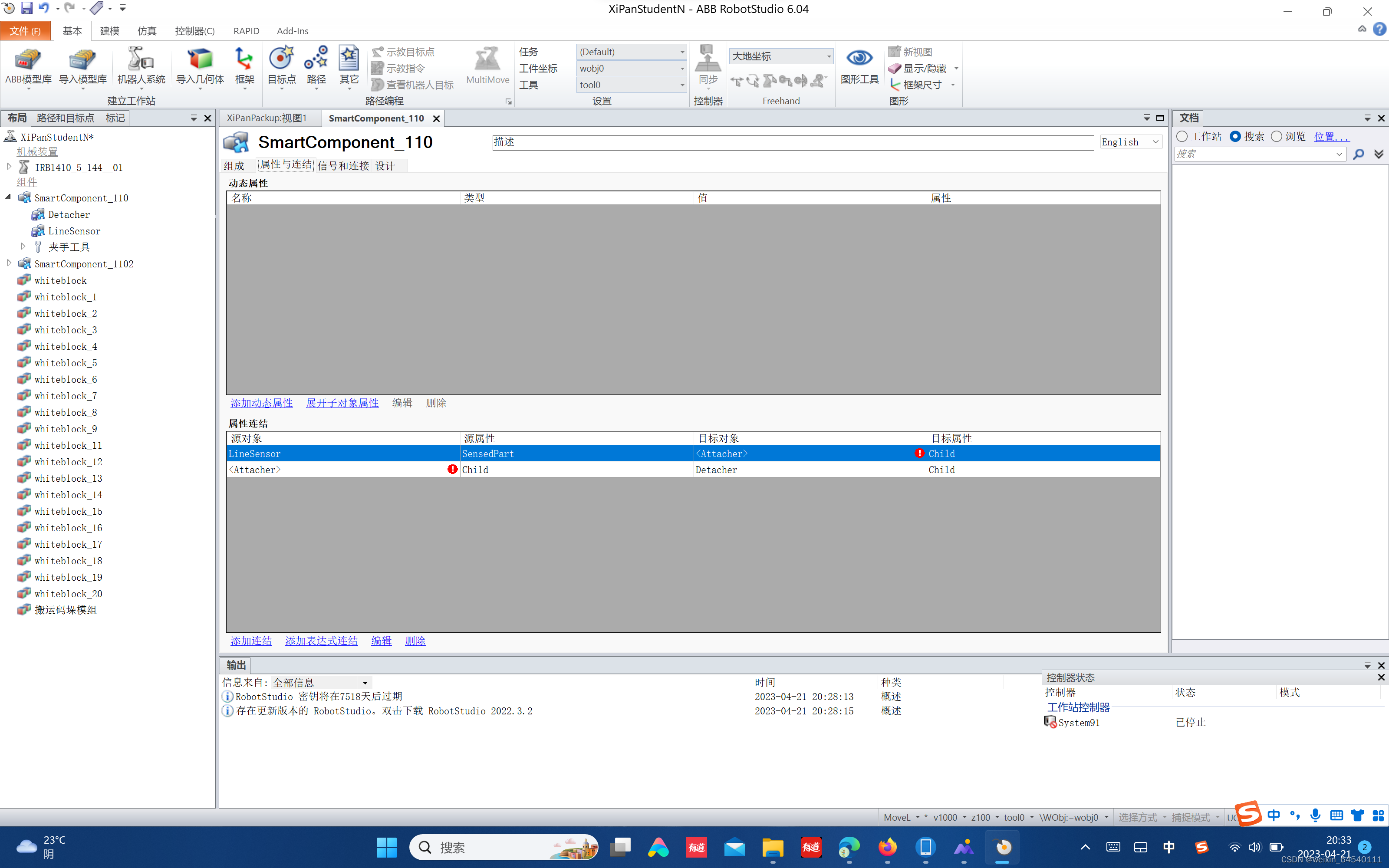
这个时候会出现感叹号报错,这些报错会影响仿真
我们怎么解决?
有时没有感叹号,我们就可以去别的选项卡下多转一下就可以了(前提先选中)
4.有时候我们没有写程序,只写了smart组件,我们想仿真进行播放,一播放他就停止了,原因是我们机器人在仿真时是先运行里面的程序,程序都没有自然立即停止咯,我们只需要把系统给去掉,只仿真smart组件就可以了
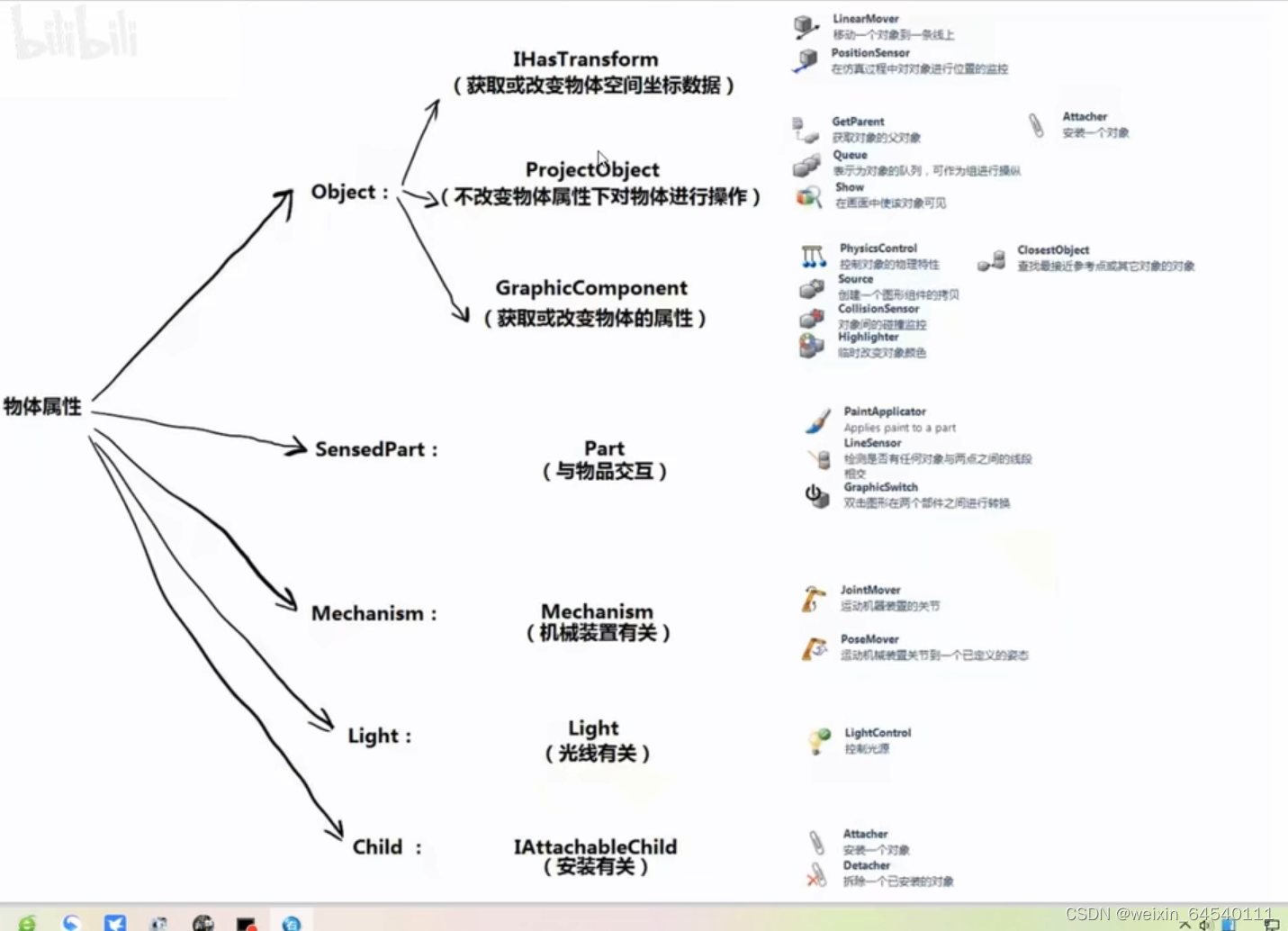
5.物体属性
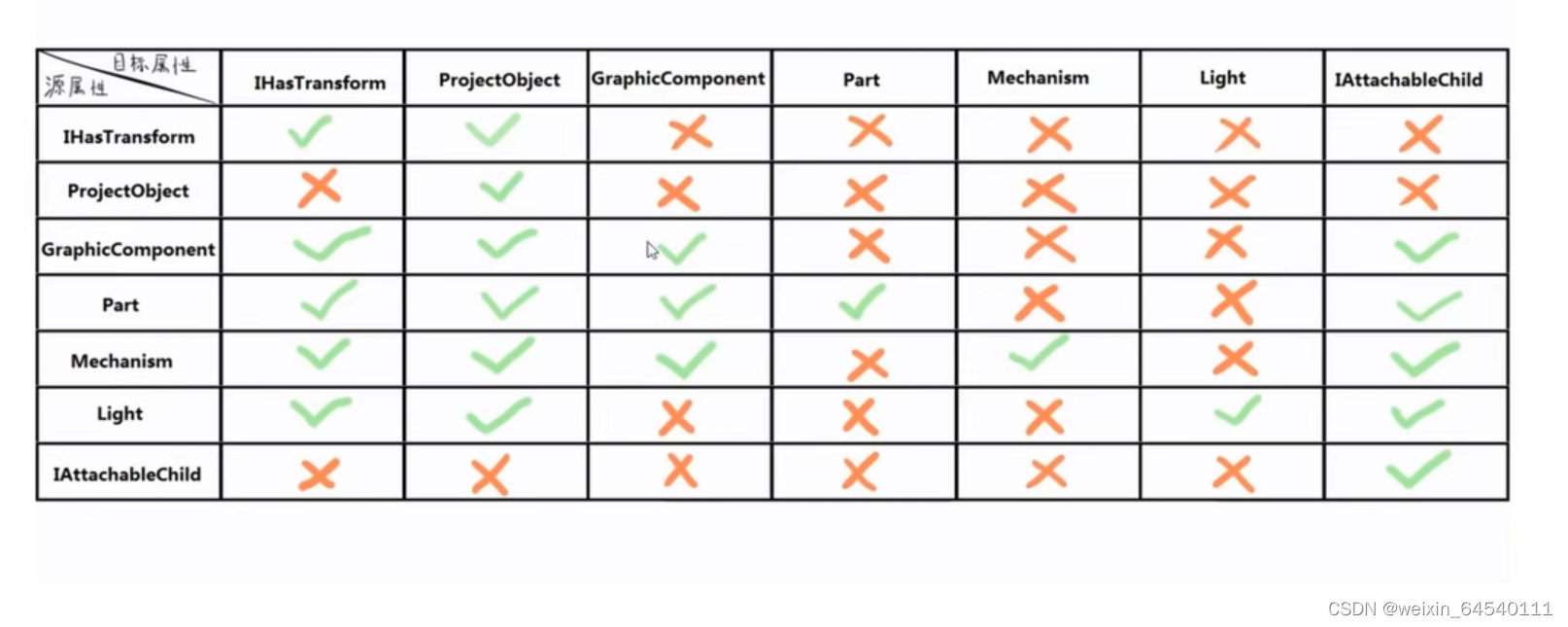
源属性-箭头起点
目标属性-箭头终点
6.动态属性
单我们有两个smart组件,我们怎么把他们连接起来勒?动态属性
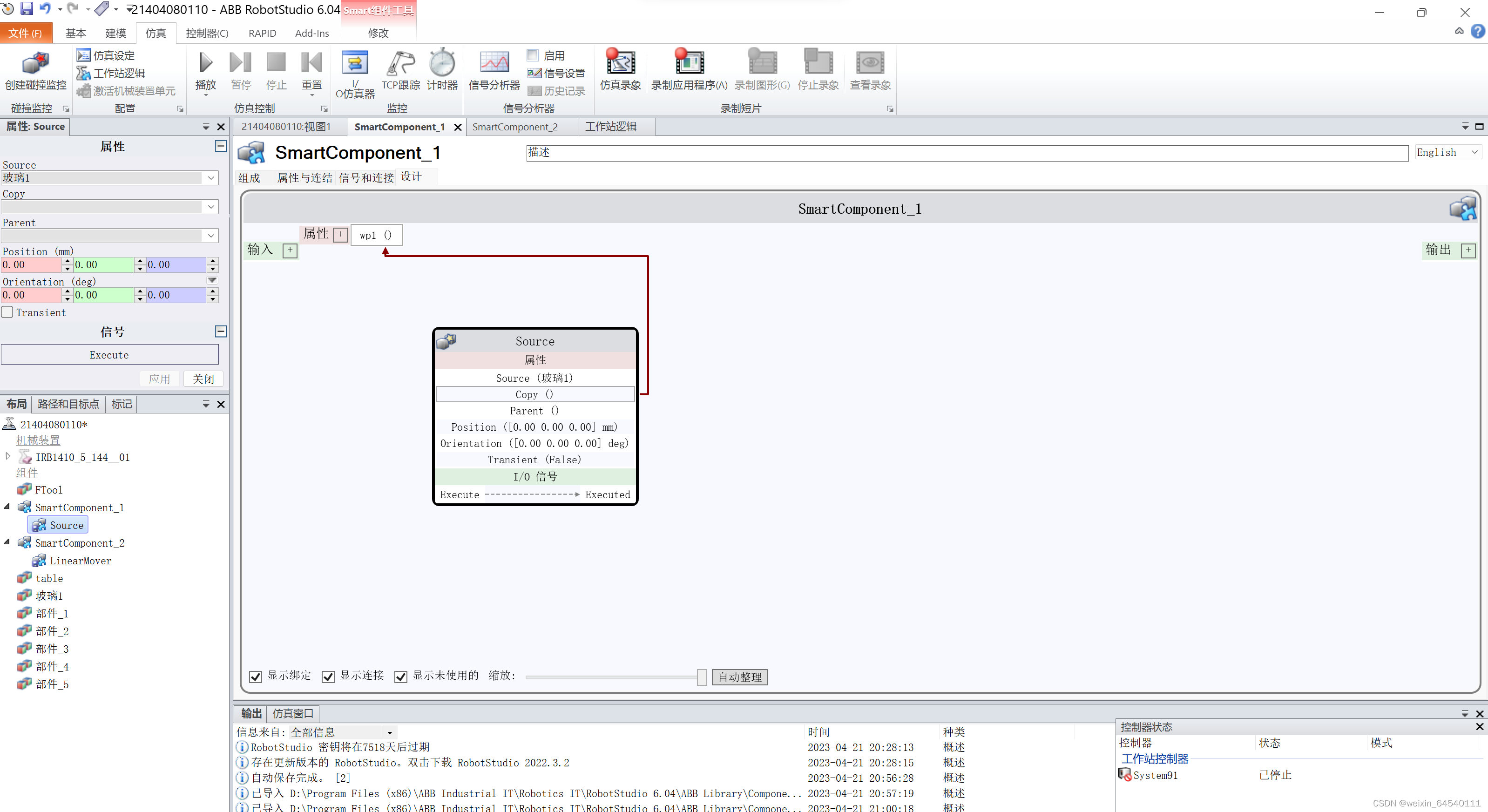
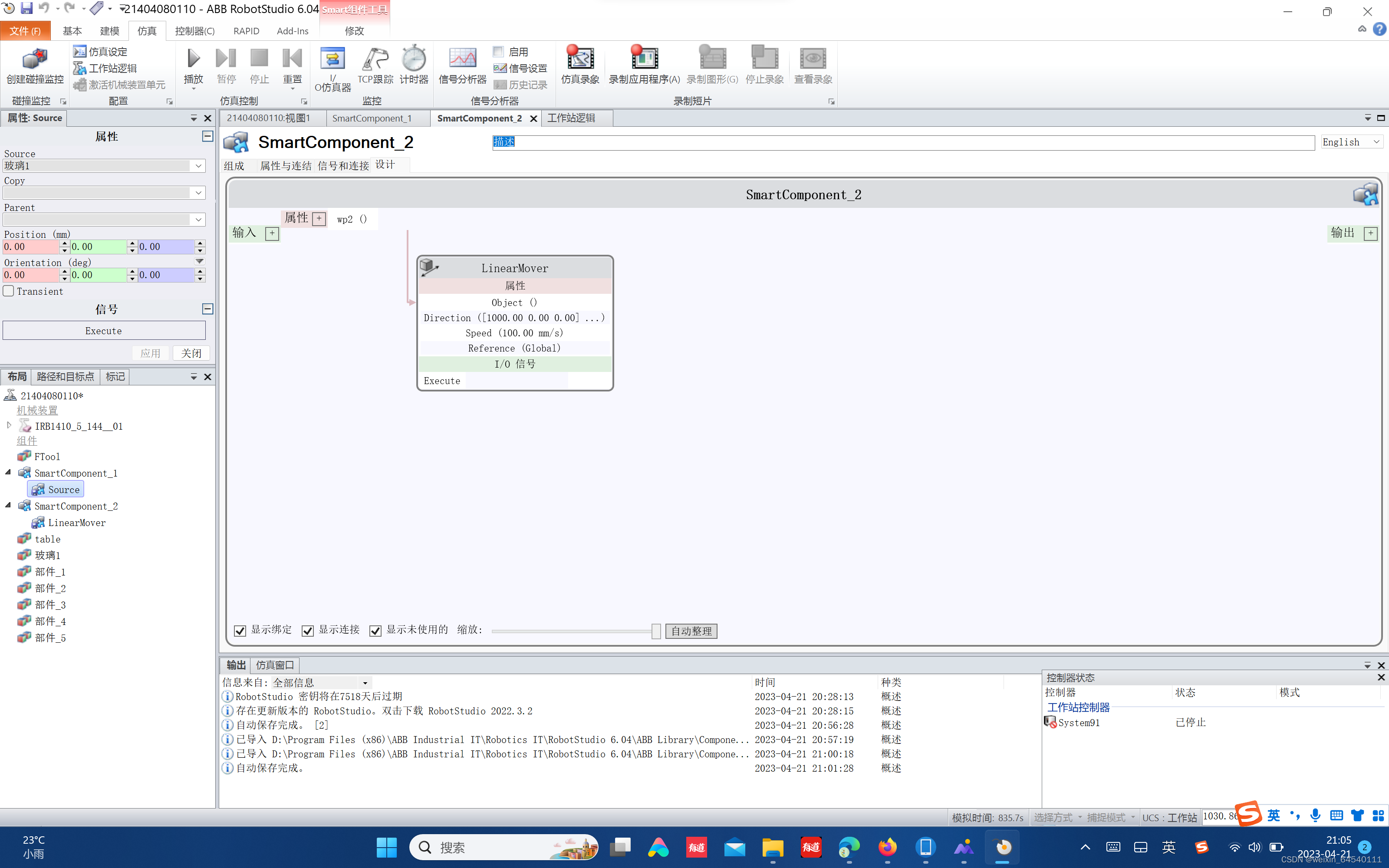
例如我们smart组件1有个复制组件,smart组件2有个线性移动组件,我们要通过smart组件2移动smart组件1中的复制出来的部件。
操作:
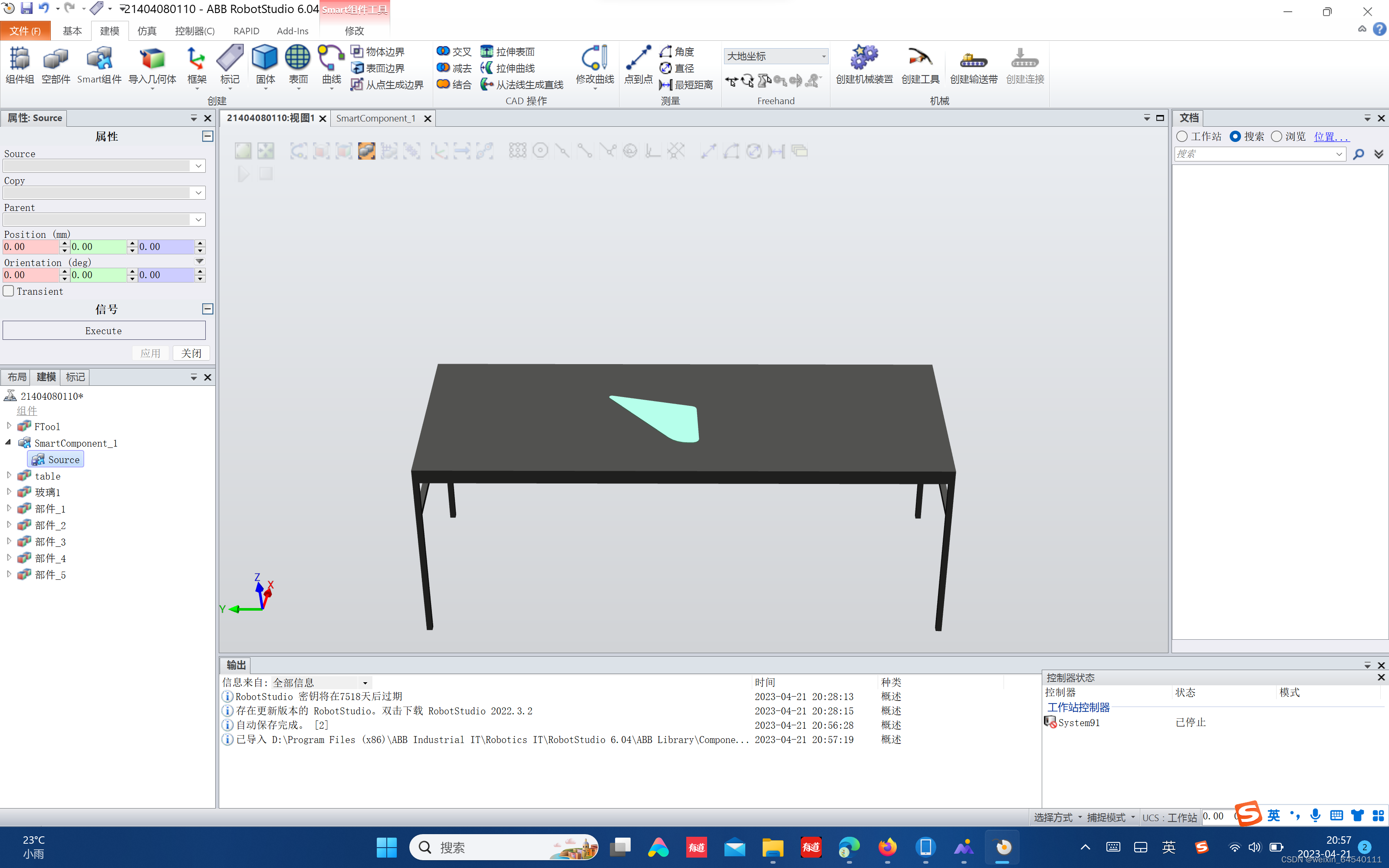
复制功能组件
 被复制部件对象名称信息
被复制部件对象名称信息
 复制后这里会出现复制出来对象的名称信息
复制后这里会出现复制出来对象的名称信息
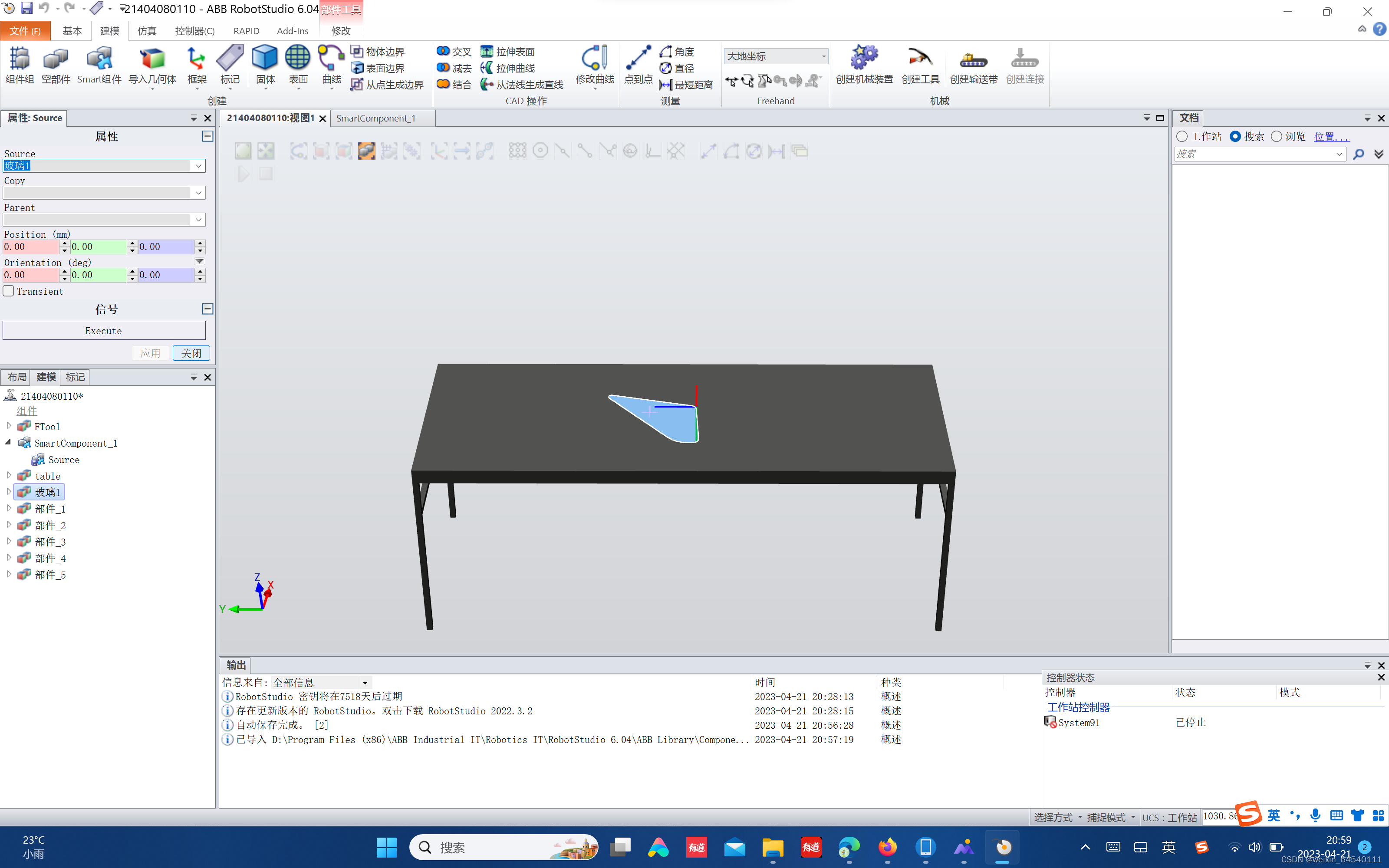
移动组件:对象暂时不选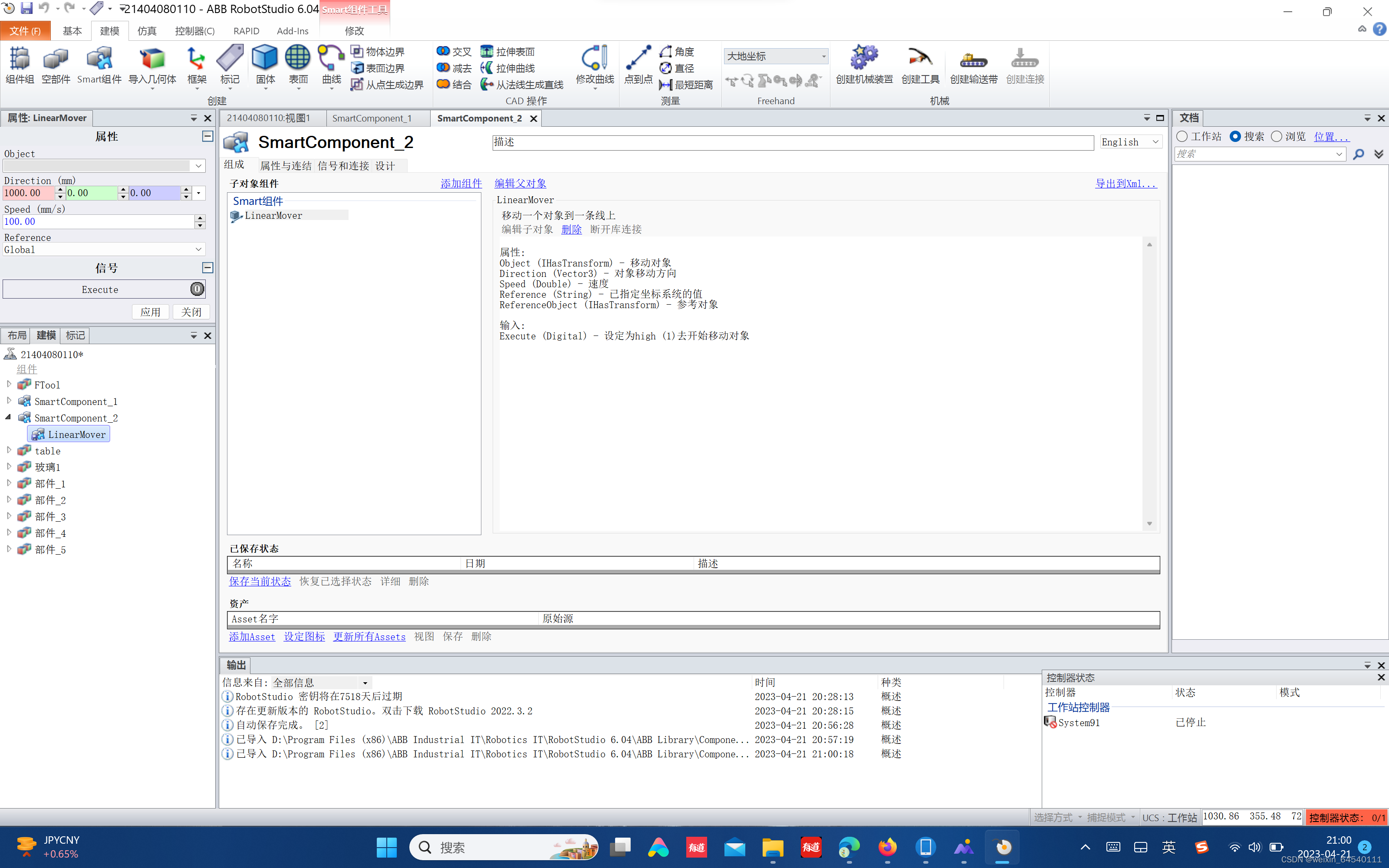
在smart1中添加动态属性:
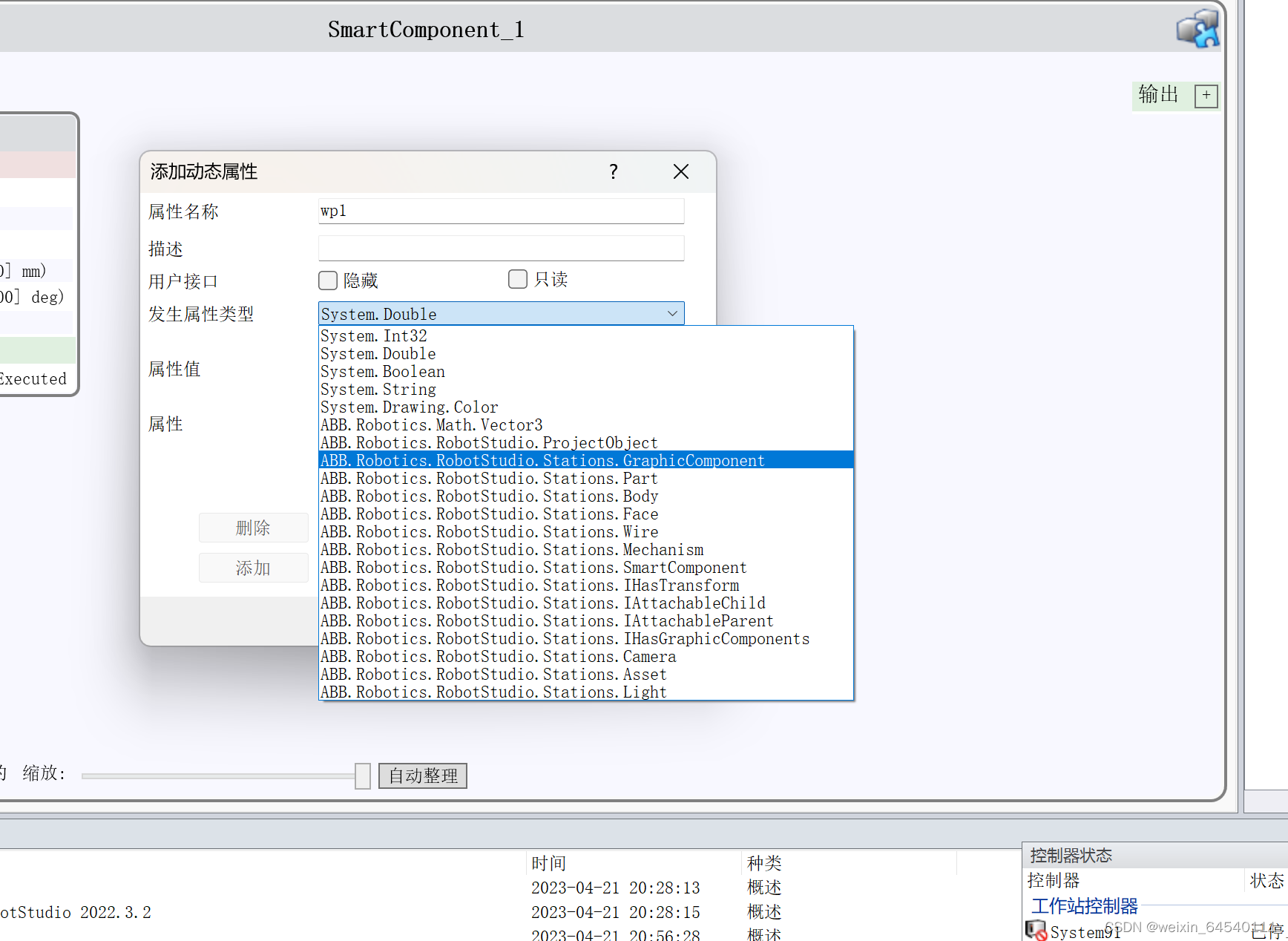
图中所示属性值
然后再smart2中也创建一个动态属性
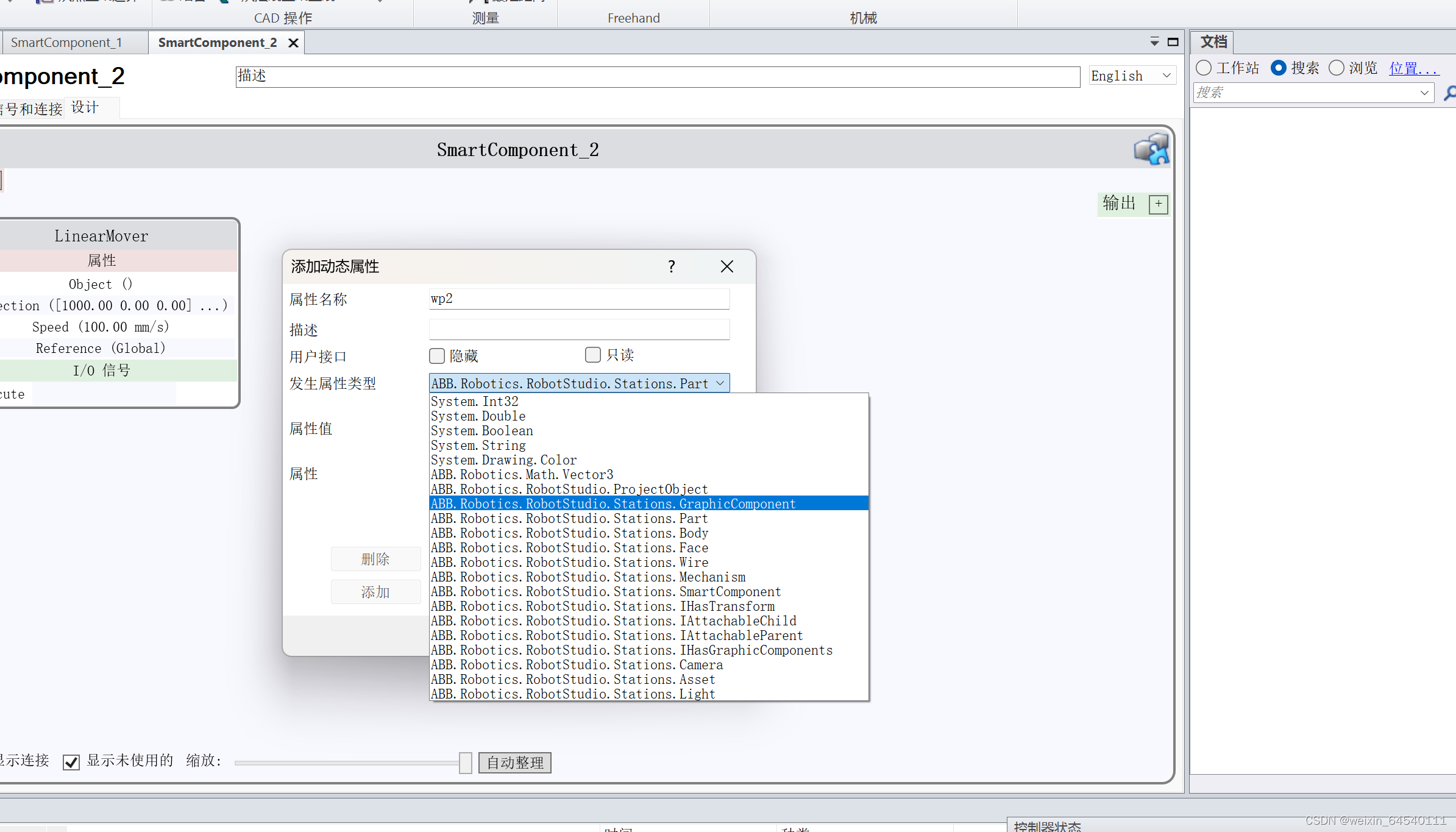
相同的属性值
然后在工作站逻辑里面连接属性值:
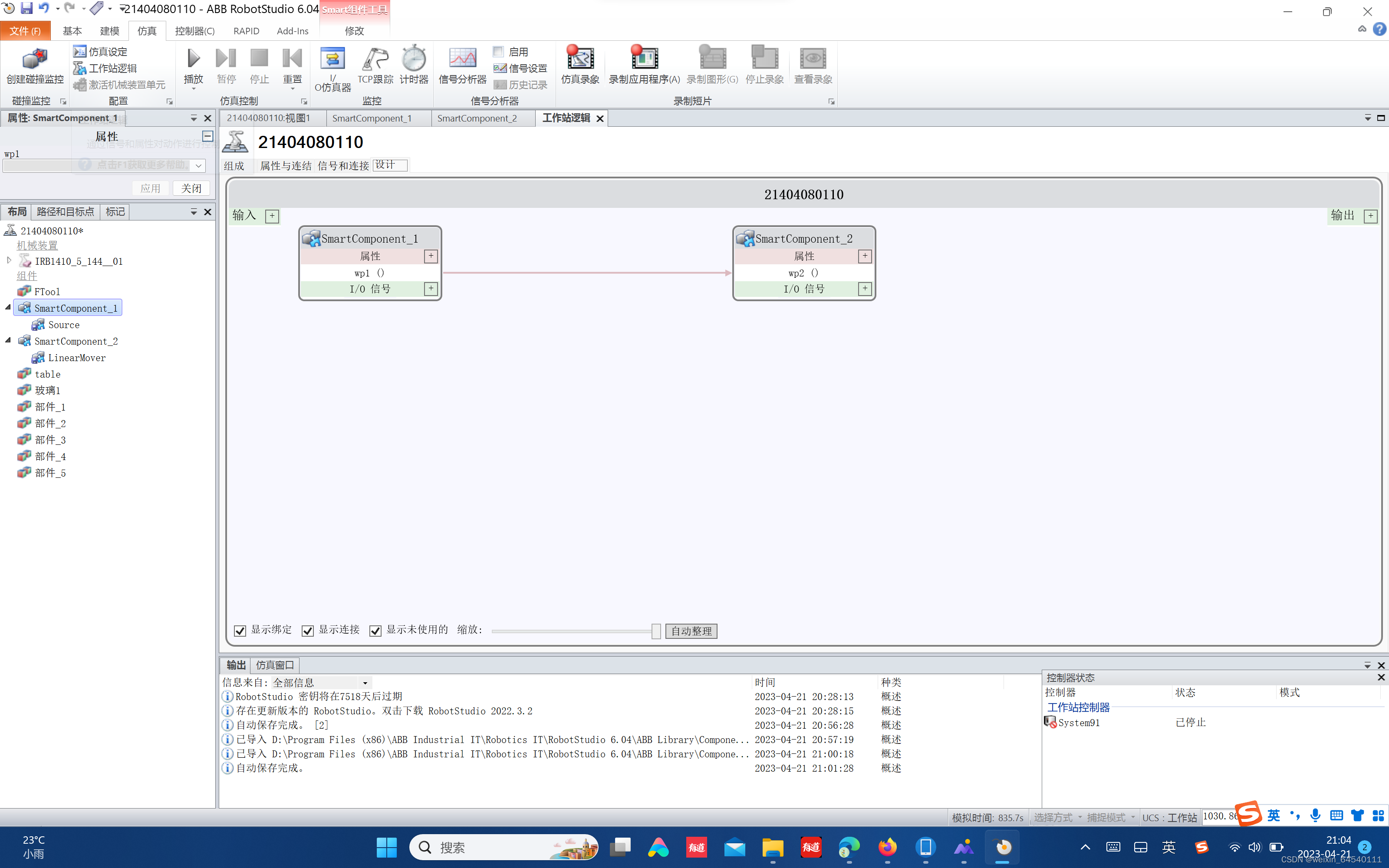
然后smart1与2中对应的也连接一下:
copy对象的信息给他
7补充:















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









