







卡尔曼滤波器在1960年被卡尔曼发明之后,被广泛应用在动态系统预测。在自动驾驶、机器人、AR领域等应用广泛。卡尔曼滤波器使用类似马尔可夫链的性质,假设系统状态只与上一时刻的系统状态有关。基础的卡尔曼滤波器使用线型方程对系统状态进行建模。为了能够应用到非线性系统,扩展卡尔曼滤波器利用泰勒展开,并只保留一次项,抛弃高次项,将非线性关系近似为线性关系。
1. 原理
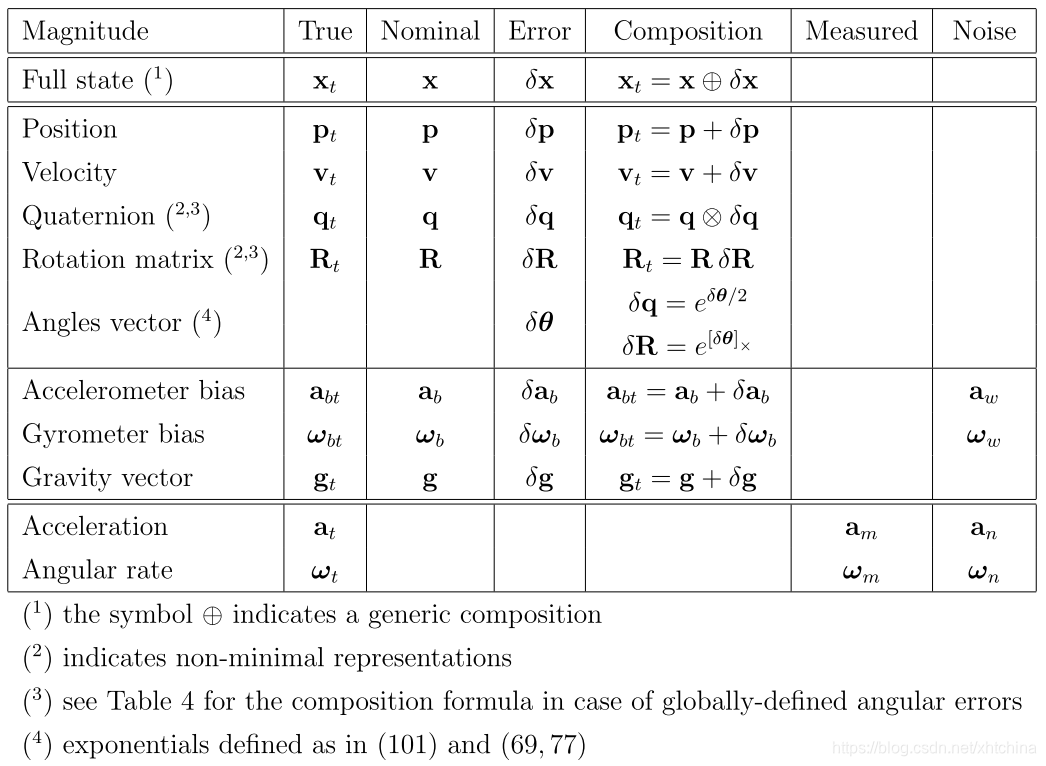
1.1. 变量定义
1.2. 名义量预测

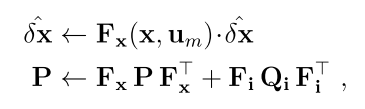
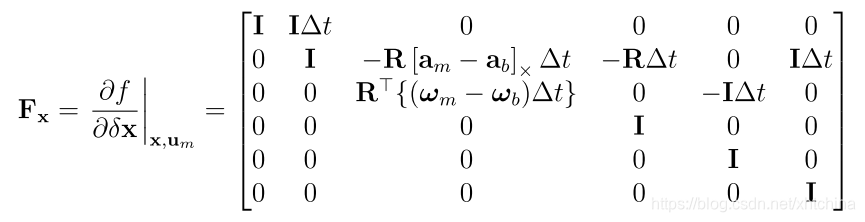
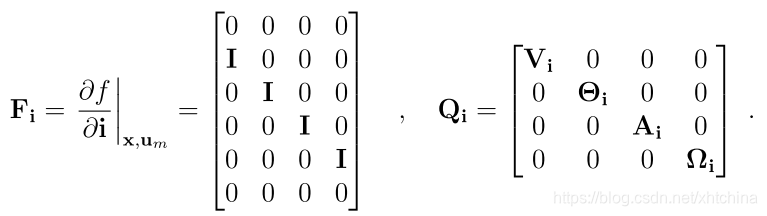
1.3. 误差量预测
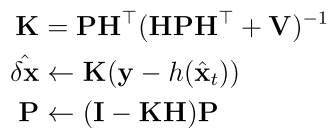
1.4. 更新
1.5. 重置

2. 主要优点
- The orientation error-state is minimal (i.e., it has the same number of parameters as degrees of freedom), avoiding issues related to over-parametrization (or redundancy) and the consequent risk of singularity of the involved covariances matrices, resulting typically from enforcing constraints.
- The error-state system is always operating close to the origin, and therefore far from possible parameter singularities, gimbal lock issues, or the like, providing a guarantee that the linearization validity holds at all times.
- The error-state is always small, meaning that all second-order products are negligible. This makes the computation of Jacobians very easy and fast. Some Jacobians may even be constant or equal to available state magnitudes.
- The error dynamics are slow because all the large-signal dynamics have been integrated in the nominal-state. This means that we can apply KF corrections (which are the only means to observe the errors) at a lower rate than the predictions.
参考文献
Quaternion kinematics for the error-state Kalman filter

















 2672
2672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









