







LADRC(Linear Active Disturbance Rejection Control)是ADRC的线性化版本,通过简化非线性模块(如ESO和反馈律)降低计算复杂度,适用于实时控制系统(如电机驱动)。以下是其核心框架:
+----------------+ +-----------------+
r(t) ---->| 跟踪微分器 (TD) |---> x1 --->| |
| | | 线性状态误差反馈 |
+----------------+ | (LSEF) |
x2 --->| |
+--------+--------+
|
v
+------+------+
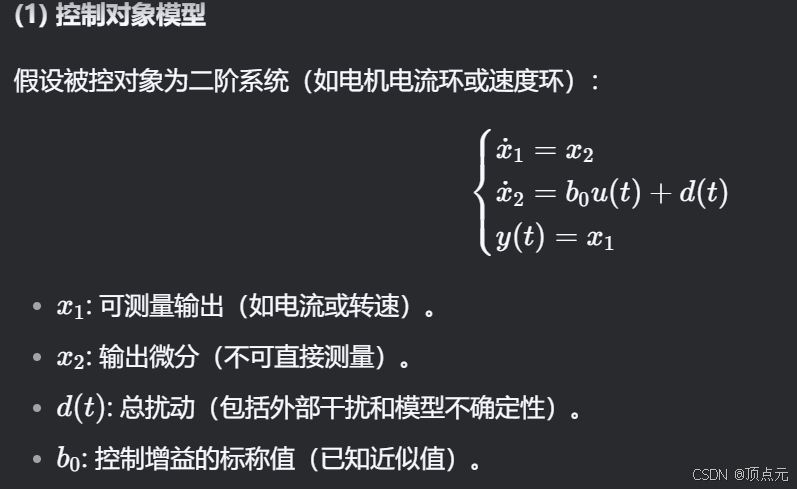
| 控制对象 |
| (含扰动d(t)) |
+------+------+
|
+----------------+ +------v------+
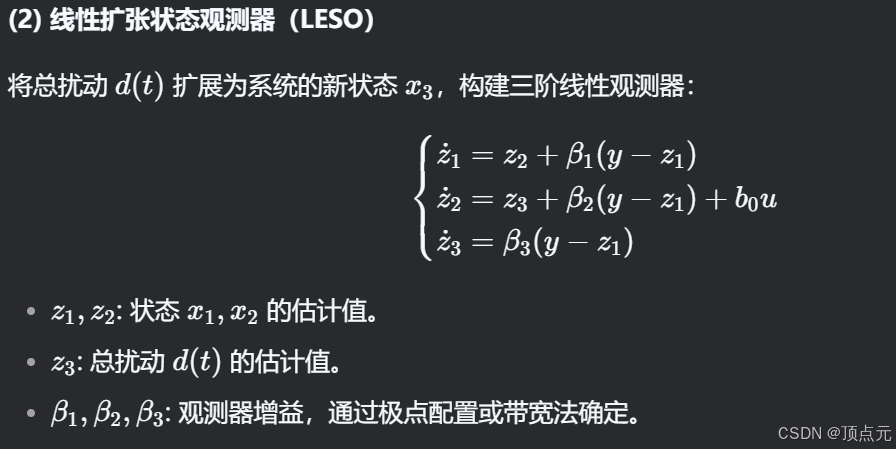
| 线性扩张状态观测器 |<-------| 输出 y(t) |
| (LESO) | +-------------+
+----------------+
| z1, z2, z3
v
扰动估计与补偿
- 信号流说明:
- 跟踪微分器(TD):将输入指令r(t)平滑为过渡信号x1及其微分x2,避免阶跃指令引起的超调
- 线性扩张状态观测器(LESO):通过系统输出y(t)和控制量u(t),实时估计系统状态z1,z2和总扰动z3。
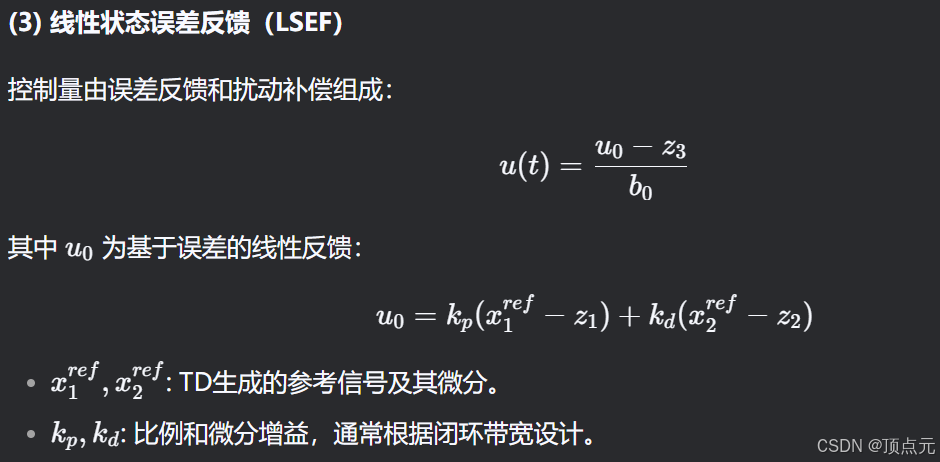
- 线性状态误差反馈(LSEF):根据x1,x2与z1,z2的误差,结合扰动补偿z3,生成控制量u(t)。

















 5577
5577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









