










 本文围绕4PCS算法展开,先介绍了wide base、LCP、RANSAC配准过程等预备知识,接着阐述近似共面四点(4PCS特征),包括4点对的仿射不变性及在3维空间找共面点集对的方法。然后详细说明4PCS算法流程,还提及加速技术,最后介绍了其在pcl中的应用。
本文围绕4PCS算法展开,先介绍了wide base、LCP、RANSAC配准过程等预备知识,接着阐述近似共面四点(4PCS特征),包括4点对的仿射不变性及在3维空间找共面点集对的方法。然后详细说明4PCS算法流程,还提及加速技术,最后介绍了其在pcl中的应用。
文章目录
总结:4PCS不同于icp和ndt,其是一种基于局部特征(特征描述子)的全局配准方法,对于噪点和异常值、低重叠度具有稳健性,对于配准初值不敏感。
1预备知识
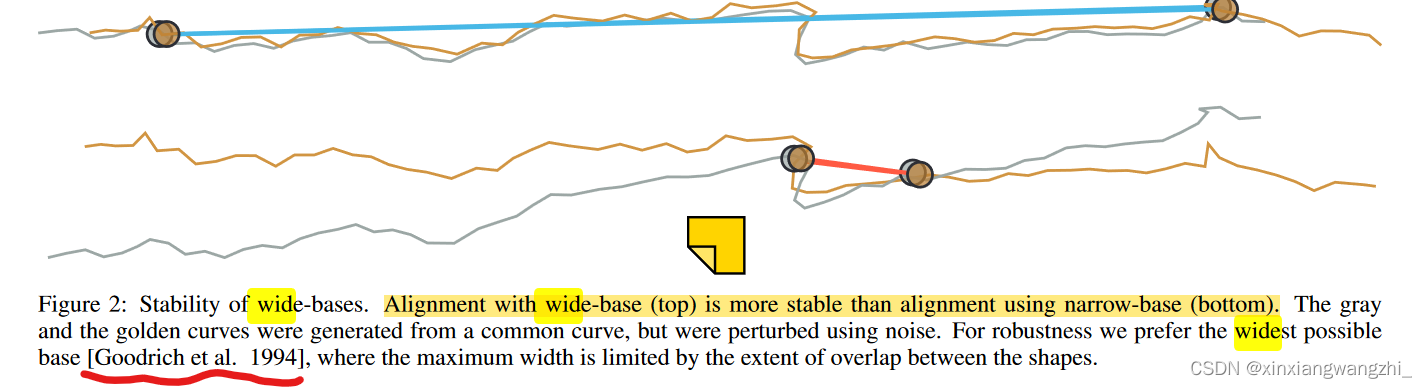
1.0 wide base
4pcs算法的关键是选取一个宽基集(wide-base),如图。(就是选取的点的距离相对大些,算法才更稳定,明显上面的配准效果比下面的好,因为上面的点隔得远,但是最远距离要受重叠度的限制)。1
1.1 LCP(largest common pointset)
即通过一个刚体变换,使得重叠区域内所有点对之间的距离小于δ,这个重叠区域就是要求的最大公共点集.
简单来说就是,给定两个处于任意初始位置的点集P和Q,找到两个点集之间的最佳刚性变换,使得P,Q中两点间距离小于δ的点数最多.
δ
\delta
δ为常数,
T
T
T变换矩阵,
P
max
⊆
P
,
P_{\max } \subseteq P , \quad
Pmax⊆P, 满足
∀
P
i
∈
P
max
,
∥
T
(
p
i
)
→
−
q
i
→
∥
≤
δ
\forall P_{i} \in P_{\max },\left\|\overrightarrow{T\left(p_{i}\right)}-\overrightarrow{q_{i}}\right\| \leq \delta
∀Pi∈Pmax,∥∥∥∥T(pi)−qi∥∥∥∥≤δ都成立,则满足最多数量的那个
P
M
A
X
P_{MAX}
PMAX称为最大公共集 (largest common pointset LCP)2
即可以利用LCP做为代价函数,求解变换矩阵,4pcs就是利用LCP做为求解变换矩阵的度量。
wide-base和LCP度量的组合使得4PCS配准方法能应对噪点和异常值
1.2 RANSAC配准过程
基于RANSAC的对齐过程很简单:从P中随机选择三个不同的点,从Q中随机选择三个不同的点,形成对应的一对基,计算对齐基对的候选变换Ti,然后计算距离Q中点δ-距离内的P中的点ki的数量。如果ki足够大,则接受Ti作为一个好的解决方案。否则,通过随机选择另一个三个点来重复该过程,从而导出可能改进当前最佳拟合的不同候选变换。
1.3 Randomized Alignment
该配准方法是RANSAC算法的一种变体。该过程从P中随机选取一个基,计算将该基与Q中所有可能的基对齐的变换,并验证配准结果。如在RANSAC中一样,为了获得一定的成功概率,该方法重复从P中选择L个不同的基。此外,验证阶段也是随机化的:首先,只验证P中数量恒定的随机点,并且仅当该子集的显著部分匹配良好时,才测试其余点。
p
g
p_{g}
pg是从点云
P
P
P中随机选择一点,该点恰好也出现在点云
Q
Q
Q中的概率,(即该点在重叠区域内)。用于配准的基(base)的数量为
N
N
N。
p
f
p_{f}
pf是在尝试L次后找不到存在的良好拟合时,算法退出的概率。因为我们从
P
P
P中随机选择基,假设:
p
f
=
(
1
−
p
g
N
)
L
p_{f}=\left(1-p_{g}^{N}\right)^{L}
pf=(1−pgN)L,设
p
s
p_{s}
ps为配准成功的概率,则有迭代次数
L
L
L:
L > log ( 1 − p s ) / log ( 1 − p g N ) (1) L>\log \left(1-p_{s}\right) / \log \left(1-p_{g}^{N}\right)\tag{1} L>log(1−ps)/log(1−pgN)(1)
For rigid transforms, it is sufficient to have N = 3 N=3 N=3
4PCS算法流程是基于Randomized Alignment方法。然而,文中引入了平面全等集的思想,从Q中只选择一小部分可能与P中给定的基相匹配的基,而不是从Q中测试所有可能的基.
2 Approximate Congruent 4-Points近似共面四点(4PCS特征)
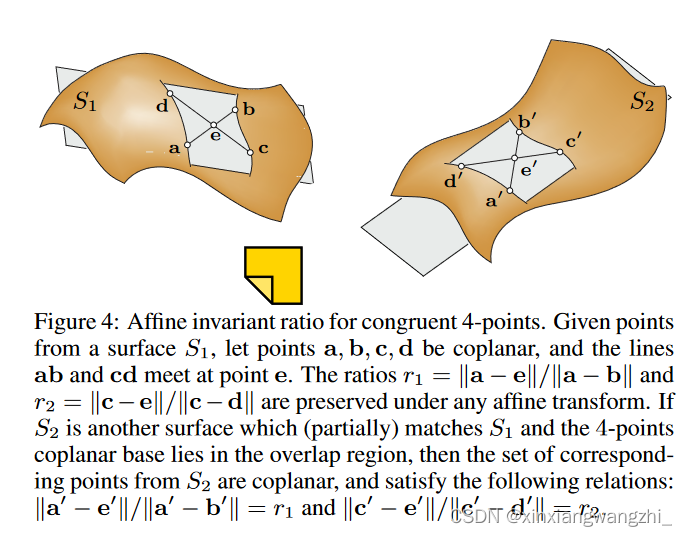
仿射变换具有以下性质:给定三个共线点{a,b,c},比率‖a− ∥ a − b ∥ / ∥ a − c ∥ \|\mathbf{a}-\mathbf{b}\| /\|\mathbf{a}-\mathbf{c}\| ∥a−b∥/∥a−c∥是不变的。Huttenlocher[1991]使用该不变量提取平面上4个点的所有二维仿射不变量集,这些不变量在仿射变换下是等价的。我们在三维空间中采用类似的方法。给定一个共面4点基,在另外一个点云数据中寻找其仿射等价(全等)4点集。所有仿射不变4点集是3维空间中4点全等点的超集。随后,我们验证这样的4点集是否(近似)与所选的基集一致。首先简要介绍了二维仿射不变四点集的提取方法,然后详细介绍了三维仿射不变四点集的提取过程。
2.1 4点对的仿射不变性
Huttenlocher(1991)介绍了一种提取二维仿射不变的4点集的方法。设一组共面点X≡ {a,b,c,d},非所有点共线,定义了三个共线点的两个独立比率。设ab和cd为相交于点e的两条线。这两个比率
r
1
,
r
2
r_1,r_2
r1,r2:
r
1
=
∥
a
−
e
∥
/
∥
a
−
b
∥
r
2
=
∥
c
−
e
∥
/
∥
c
−
d
∥
r_{1}=\|\mathbf{a}-\mathbf{e}\| /\|\mathbf{a}-\mathbf{b}\|\\ r_{2}=\|\mathbf{c}-\mathbf{e}\| /\|\mathbf{c}-\mathbf{d}\|
r1=∥a−e∥/∥a−b∥r2=∥c−e∥/∥c−d∥
这两个比率
r
1
,
r
2
r_1,r_2
r1,r2,具有仿射变换不变性,并且能唯一定义四个点。
如下图:
现在,给定一个由n个点组成的集Q,以及两个仿射不变比r1和r2,我们可以有效地提取由这两个不变量定义的所有4个点集,其中k是4个点集的数目,如下所示:对于每对点q1,q2∈ Q、 计算两个中间点:
e
1
=
q
1
+
r
1
(
q
2
−
q
1
)
\mathbf{e}_{1}=\mathbf{q}_{1}+r_{1}\left(\mathbf{q}_{2}-\mathbf{q}_{1}\right)
e1=q1+r1(q2−q1)
e
2
=
q
1
+
r
2
(
q
2
−
q
1
)
\mathbf{e}_{2}=\mathbf{q}_{1}+r_{2}\left(\mathbf{q}_{2}-\mathbf{q}_{1}\right)
e2=q1+r2(q2−q1)
如下图的中间图所示:对于基准点云任意4个点中得到的
r
1
,
r
2
r_1,r_2
r1,r2,在待配准点云任意两点
q
1
,
q
2
{q}_{1},{q}_{2}
q1,q2,由上式可以得到2个
e
1
e_1
e1(由 r1计算得到),2个
e
2
e_2
e2点(由 r2计算得到)。如下图中的右边图所示:对于两条线段(4个点)而言,若第一个线段中的任意一个
e
1
e_1
e1(一个线段两个
e
1
e_1
e1)与第二条线段中任意一个
e
2
e_2
e2(一个线段两个
e
2
e_2
e2)重合或者在很小距离范围内,那么可以认为这两个线段对应的四个端点,可能是基准点云中4个点的对应点。
如下图:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8OAGx31j-1655646190413)(./4points.png)]](https://i-blog.csdnimg.cn/blog_migrate/72d909ebde00fb10ee5a7df5f91d2060.png)
2.2在3维空间中寻找4个共面点集对
给定从点集P和另一点集Q中选择的(近似)共面点的4点基B∈ R3,我们的目标是从Q中提取与B近似相等的所有4个点的集合。首先给出B,我们计算它在这个平面上的两个仿射不变量比,如前所述。
然后,使用第3.2节中描述的方法,从点Q中,通过仿射变换提取与B相关的所有点集。虽然此方法能够获得所需4点的共面点集,但是会存在一定数量的虚假匹配。
为了去除非全等基,我们查看它们在点云中的原始位置,并验证相应的集是否在某个距离阈值内与基集B一致。然后,使用基B和Q中的每个基,通过最小二乘计算最佳对齐刚性变换。
上述程序需要大量内存,对于大量点云是不合适的。做出以下改进:刚性变换保持点间欧氏距离。给定基数B≡ {a,b,c,d},我们首先计算距离d1=‖a− b‖和d2=‖c− d‖。现在我们只考虑Q中的的距离为d1或d2的点对,最大误差为δ。
3 4PCS算法
我们给出了两个点集P和Q,这些点的位置精度的不确定性度量(δ>0),以及P中可与Q重叠区域分数f的估计方法。我们的目标是找到一种刚性变换,使P中的最大点数与Q中某个点之间的距离小于δ。我们提出了一种算法(见算法1),其运行时间取决于给定点集之间匹配点数的最大值,并将其随机化,以很高的概率发现正确的刚体变换。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WuXT13Ov-1655646190413)(./4pcs.png)]](https://i-blog.csdnimg.cn/blog_migrate/53ad9f355c7b97e3e7ffed6040f6fa3b.png)
我们首先选择一个由由4个共面点组成的基B⊆ P。实际上,我们允许一些非平面性,因为不太可能存在4个共面点。我们随机选取三个点,并选择剩余点,使四个点一起形成一个widebase,该base(近似)共面。通过选择彼此相距较远的点来创建widebase,从而产生更稳定的共面点。然而,如果我们选择的点相距太远,所选的点可能不会全部位于重叠区域(用于部分匹配)。我们使用重叠分数f来估计这个最大距离。如果没有提供f的估计值,我们将在f=1,0.5,0.25,…的情况下以减少猜测的方式运行该算法。直到我们达到所需的误差容限。在f已知的情况下,我们首先选择一组可能位于重叠区域的三个点,然后如前所述选择第四个点。
对于从算法的SELECTCOPLANARBASE阶段获得的平面基B,我们可以使用基点定义仿射不变比率。然而,对于近似平面基底,我们使用位于连接点对的的最近点来定义不变比率。现在,我们应用第2.1和2.2节中描述的方法来提取集合U≡ Q中的4个点的所有子集的{U1,U2,…,Us},它们可能与B一致。对于每个Ui,使用B和Ui之间的对应信息,我们计算使B在最小二乘意义上接近Ui的最佳对齐刚性变换Ti【Horn 1987年】。为了验证Ti,我们计算Ti*(P),并计算Ti*(P)中有多少点比δ更接近Q中的某个点。为Ti评分(参见[Irani和Raghavan 1996])。选取评分最高的Ti,为最终的变换T。
给定一个基Bi,我们描述了如何计算与其对应的最佳变换Ti。根据对齐的点数,为每个对齐变换Ti分配一个分数。使用该程序,我们现在执行Randomized Alignment过程,并根据重叠分数f的估计值,测试出L个不同的基(见公式1)。在所有这些试验中,我们选择得分最高的变换矩阵Topt。
4 一些加速技术
配合局部特征描述子和局部特征(曲率,法线),加速4点共面点集的选择过程。
5 4pcs在pcl中应用
#pragma once
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <iostream>
#include <pcl/registration/ia_fpcs.h>
#include <pcl/registration/ia_kfpcs.h>
#include <time.h>
#include <boost/thread/thread.hpp>
using namespace std;
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloud;
int fourpcs(const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_source,
const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_target,
pcl::PointCloud<pcl::PointXYZ>::Ptr transformed_source)
{
//四点法配准
PointCloud::Ptr pcs(new PointCloud);
pcl::registration::FPCSInitialAlignment<pcl::PointXYZ, pcl::PointXYZ> fpcs;
fpcs.setInputSource(cloud_source);//输入待配准点云
fpcs.setInputTarget(cloud_target);//输入目标点云
//参数设置
fpcs.setApproxOverlap(0.6);//两点云重叠度
fpcs.setDelta(0.5);//Bunny
//fpcs.setDelta(0.5);//hippo
fpcs.setMaxComputationTime(50);
fpcs.setNumberOfSamples(int(cloud_source->size()/20));
Eigen::Matrix4f tras;
clock_t start = clock();
fpcs.align(*pcs);
clock_t end = clock();
cout << "time:" << (double)(end - start) / (double)CLOCKS_PER_SEC << endl;
cout << "score:" << fpcs.getFitnessScore() << endl;
tras = fpcs.getFinalTransformation();
cout << "matrix:" << endl << tras << endl << endl << endl;
//PointCloud::Ptr cloud_end(new PointCloud);
pcl::transformPointCloud(*cloud_source, *transformed_source, tras);
//visualize_pcd(cloud_source, cloud_target, cloud_end);
return (0);
}
参考:
《4-Points Congruent Sets for Robust Pairwise Surface Registration》
https://blog.csdn.net/qq_41102371/article/details/111293664
https://blog.csdn.net/Ha_ku/article/details/79480613
https://blog.csdn.net/renyuanxingxing/article/details/84662986
https://blog.csdn.net/qq_41102371/article/details/111715115


















 1009
1009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









