







四旋翼振动测试实验分析
-
List item
针对四旋翼悬停掉高的问题,由于初步通过对IMU数据进行分析,发现在反馈高度掉高时,由于加速度计测量的数据整体为正值,而导致积分出的速度为正,出现融合高度和融合速度反向的问题,故决定通过振动台模拟飞行数据,进行分析。
实验测量标准:由于飞机正面不好固定,所以把飞机反面固定后,给固定z轴扰动为1.5g,扫频范围为5Hz~150Hz之间。
实验现象:
-
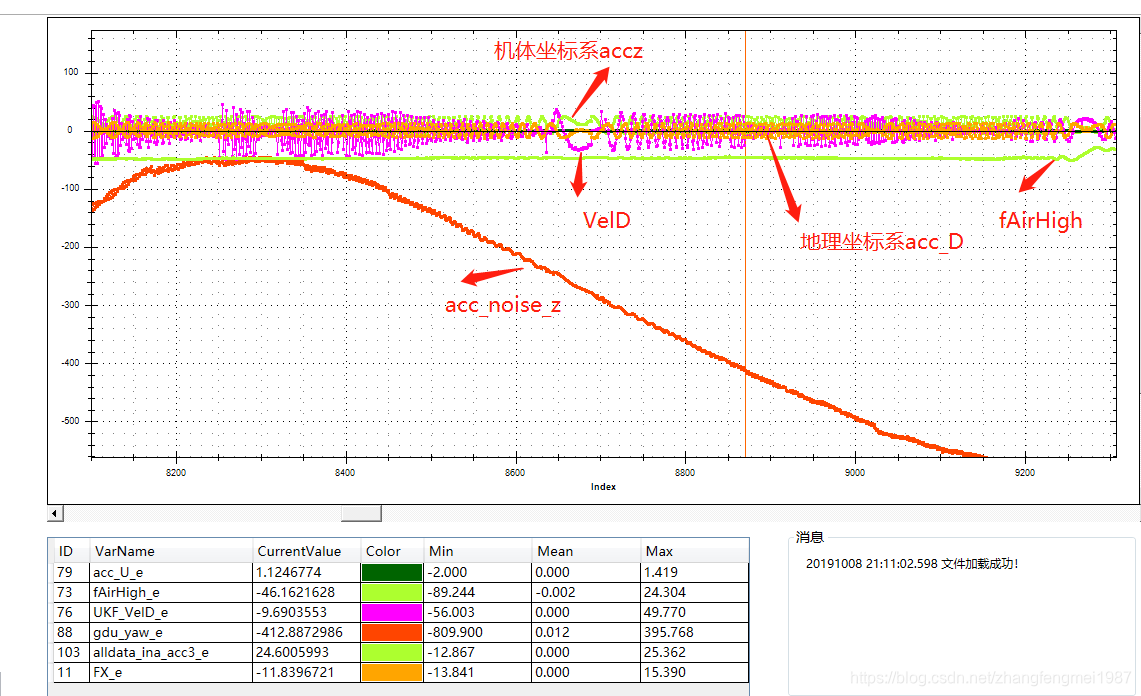
由于在数据融合中,对上锁模式下,融合速度在一定时间内,做了处理,使得融合速度VelD在0幅值上下波动,所以可以看到融合高度fAirHigh大部分保持不变。
-
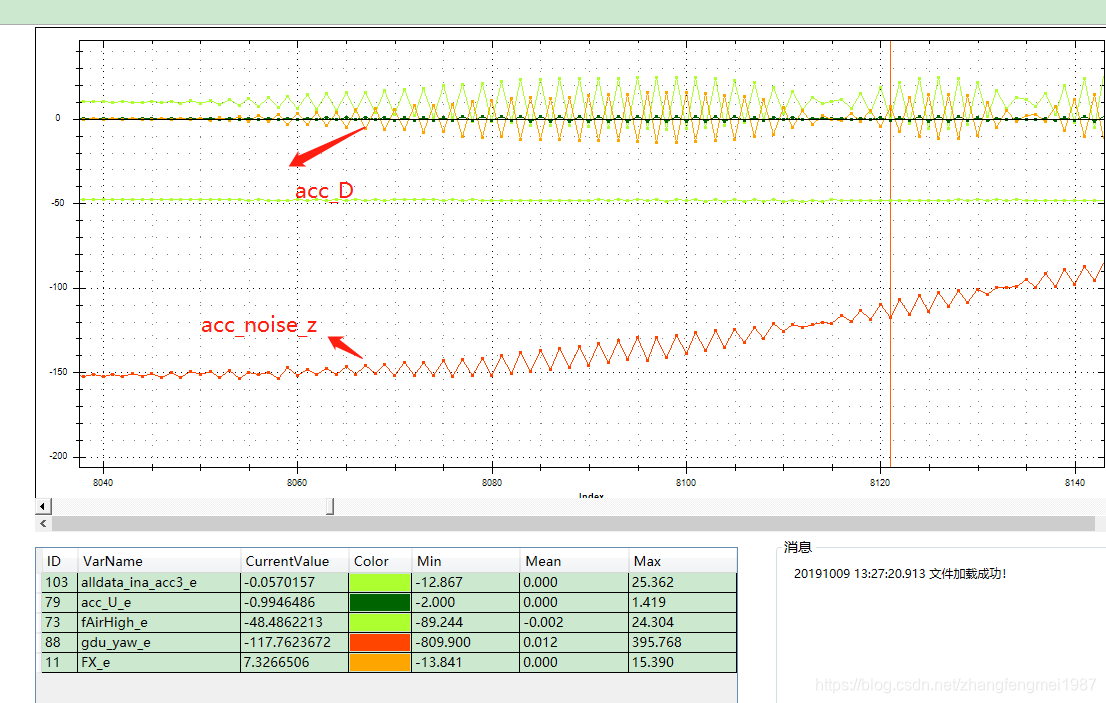
采用振动仪起振阶段,acc_noise_z和acc_D变化趋势相反,即acc_D减小,则acc_noise_z增大,当acc_D趋于0的时候,acc_noise_z相对恒定。
下图为放大后的效果。
3.纠正第2点结论。截取振动中段数据分析
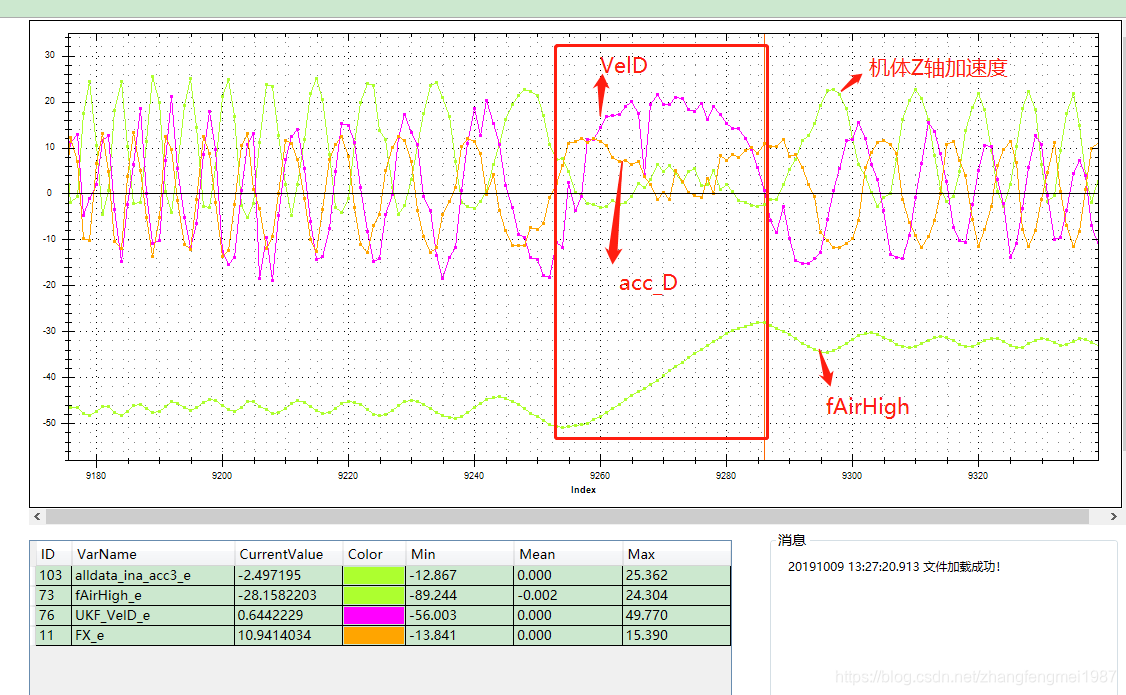
对比下图两点信息可以看出第一个红色标记部分,acc_D在增大,而 acc_noise_z在增大,而第二个红色标记部分,acc_D在增大,而 acc_noise_z在减小,所以可以知道acc_D和acc_noise_z并不存在唯一成正反比的关系。是否意味着中间还有其他的量在影响这个变化呢?

4. 当acc_D不是正弦波变化,出现过零点的情况的时候,融合速度VelD向上,融合高度从-50增加到-30左右。如下图所示:
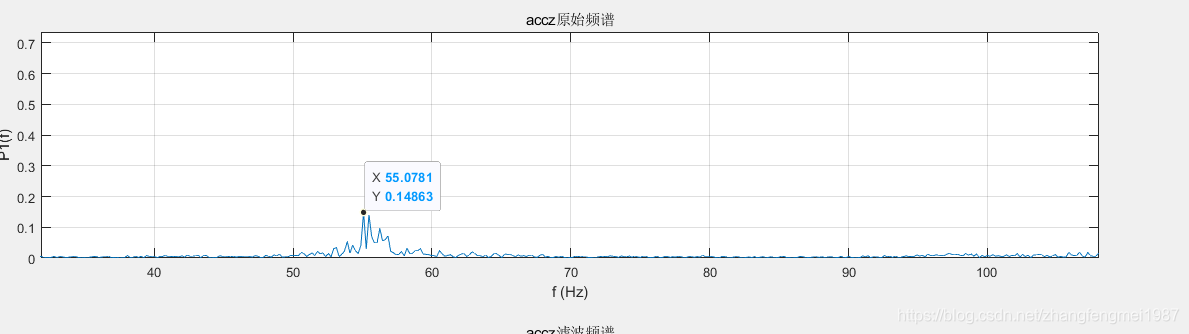
5. 振动仪频谱分析和飞控传感器频谱数据分析。
由于振动仪设置分析频率为2400hz,分析普线为2048,时间分辨率为10ms,得到两个振动频率比较大的点,分别是X1=53.542,X2=142.233,图形如下:
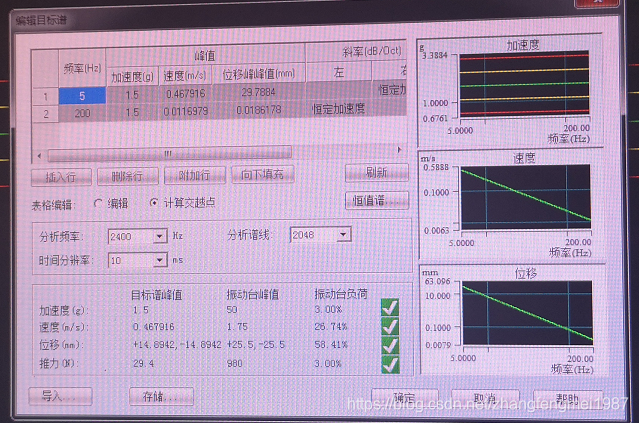

而飞控得到的频谱却是在55.07hz,0.1486g2/hz。两者频谱相近。

















 1707
1707

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









